1 引言
研究表明,由于机动车事故所造成的重大死亡与残疾成为一个越来越大的一个社会问题,而对于减小机动车交通事故的一个重要的方法就是汽车主动安全技术。目前汽车的主动安全技术主要有以下几种:车道偏离警告系统、牵引力控制系统、ABS系统等。
本文主要介绍关于车道偏离系统及牵引力控制系统的一些最新研究进展。
2 车道偏离警告系统[1]
在众多的交通事故中,汽车出现车道偏移是造成驾驶员生命危险的主要原因之一。为了减少交通事故发生的数量,以及交通事故所造成的伤害程度,车道偏离警告系统是一种行之有效的方法。基于视觉车道偏离预警系统其实已经存在了近20余年了,在此期间,系统也得到了一定程度的完善。论文提供了当前LDW(Lane Detection and departure Warning system)系统的概述,特别描述了预处理,车道模型,车道检测技术和离场警报系统。
2.1 车道偏离警告系统的整体框架
车道偏离警告系统是由车道检测和离场警报系统的两个主要部分组成的。第一道路车道标记由车道检测模块提取的,然后测量模块确定跨过车道边界是否是无意操纵,以防止出现意外的车道偏离。车道偏离警告系统的总体框图如所示。
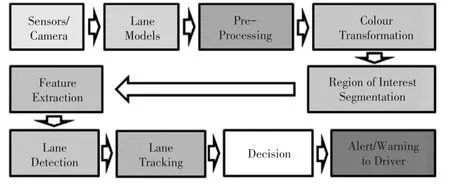
图2-1 车道偏离警告系统的整体框架图
2.2 环境适应
智能车辆配备先进的传感系统和智能驾驶辅助系统。因此有人提出了一个应对于恶劣天气条件和夜间条件具有鲁棒性的车道偏离警报系统,它可以使用车道的不同颜色来标记车道。
由于车道偏离警告系统运行工作环境条件的变动,增加了车道检测的挑战性。因此,在系统工作时,需要考虑车道类型,路面,白天,环境因素(阴影,雨,雾,日照)等不同的复杂情况。
2.3 预处理
预处理步骤是车道检测和离场预警系统的重要组成部分,有助于减少计算时间,提高算法效果。它也被用来消除由于摄像机运动不稳定造成的传感器噪声和错误。预警系统的输入是从沿着汽车中心线,安装在车辆内部的摄像机拍摄的基于RGB的彩色图像序列。为了使摄像头在不妨碍驾驶员视野的情况下清楚地看到前方的道路,同时提高车道检测精度,许多研究人员采用了不同的图像预处理技术。比如说为了实现平滑操作,会使用均值,中值或高斯滤波器的方法。
2.4 颜色处理
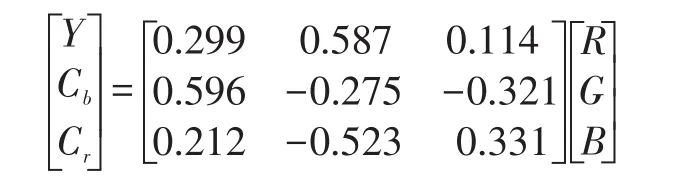
在车道检测过程中,大部分算法只对图像的灰度进行分析。像素的颜色最初是以高度相关的RGB空间表示的。在处理时可以将RGB色彩空间可以转换为YCbCr色彩空间。原因在于人的视觉系统对颜色不太敏感,彩色图像中最重要的信息是在图像的Y分量中保留的。
转化的公式如下
2.5 车道建模
在车道检测和离场预警系统中,车道建模起着重要的作用。车道建模是用于获取道路车道标记的数学描述。到目前为止,各种基于视觉的车道检测技术提出了不同的车道模型。为了模拟道路,一些算法使用直线;而也有算法使用更复杂的模型,如抛物线,双曲线,B样条和回旋曲线。
2.6 车道检测
车道检测是计算机视觉领域的研究热点,在车道偏离预警系统中发挥重要作用。图2-2展示了智能车辆的基本技术。车道检测系统检测来自复杂环境的车道标记,并使用它们可靠地估计车辆相对于车道的车辆位置和轨迹。为了开发一个能够适应各种条件的强大的车道检测系统,必须将车道标识检测器与车道跟踪系统相结合来开发系统。车道检测任务分为两个主要的步骤:边缘检测和车道检测。
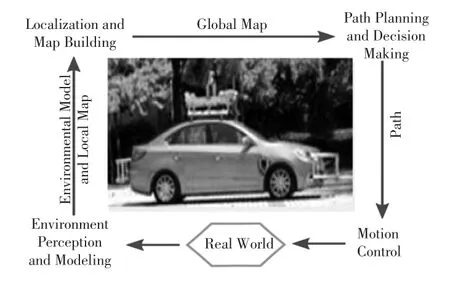
图2-2 智能车辆上所用的技术
2.7 小结
在本文中,我们描述各种基于视觉的车道偏离警告系统。通常,此系统包括车道建模,特征提取,车道检测模块。可以发现,在驾驶员辅助系统如车道偏离警告系统,换道辅助系统和防止碰撞中,车道检测扮演着非常重要的作用。由于车道标记被假定为边缘特征,基于特征来进行车道检测。在大多数系统中,霍夫变换被广泛用于检测车道标志;它的缺点是需要大量的计算时间。同时本文还着重介绍了在阴影,动态照明条件、浓雾、雨天条件、夜间时间、车道标线条件差等复杂环境下的车道检测问题。
3 车道变换的深入研究对驾驶辅助系统的影响[2]
3.1 研究背景及研究意义
由于与邻近车辆的复杂交互作用,车道变换事件往往与安全问题和交通运营效率有关,尤其是在交通拥堵的状况下的车道变化。车道变化的影响更加明显,因为这些事件导致车辆加速和减速更频繁和突然导致的碰撞发生的风险更高。从这些角度来看,对车道变化的深入了解将对开发车载驾驶辅助系统有重要的意义。本研究的目的是使用车辆轨迹分析车辆交互作用,并确定影响车道变化的因素。本研究使用了南加州US-101高速公路段的车辆轨迹数据。车辆轨迹按照交通拥堵与交通不拥堵两种不同情况分为两组。
本文采用一种处理二元选择条件的技术来建立车道变换决策模型。对于交通不拥堵情况下的车道变化,研究发现,无论车辆当前和目标车道的车辆位置如何,驾驶员更可能关注前方车辆的移动。另一方面,在决定车道改变时,如果交通拥堵,车辆驾驶员更可能受到在目标车道上行驶的车辆的影响。车道变换决策模型在两种交通情况下进行车道变换,准确率达到80%左右。这可能是因为驾驶员进行决策时,倾向于避免与目标车道上的车辆发生侧面碰撞或追尾碰撞。
3.2 主要研究结果与研究意义
本研究可用于更好地理解不同交通状况下,相关的驾驶员车道变换行为,并且在设计更安全的辅助系统中提供有价值的参考方案,以开发用于处理传感器数据的算法,例如盲点检测系统(BSDS)和车道保持辅助系统。
4 个性化车道变换识别系统的在线学习在驾驶辅助中的应用[3]
4.1 研究背景与研究意义
情境识别是机器进行决策的重要组成部分,这是通过一系列行为来识别已发生情况的过程。因此,应该给予驾驶辅助系统一个在线学习过程,通过对发生的情况进行建模和标记以及调整知识库来使机器决策更加准确。
本文提出了一种改进的案例推理(CBR Case-Based Reasoning)方法,并将其应用于车道变换驾驶情况识别。所提出的CBR能够使用情景-操作者建模(SOM Situation-Operator Modeling)方法对事件离散情况进行建模。另外,通过模糊逻辑的集成,在线学习操作人员的操作,并重新用于情境识别。作为实验,所提出的方法被用于识别驾驶辅助系统的车道变换情况。根据基本评测结果,所提出的方法能够改善自动驾驶系统对车道变换情况的识别性能。
4.2 研究结果
考虑使用驾驶操纵的实验应用来评估所提出的方法。不同的驾驶测试结果表明,驾驶体验在线学习可以提高驾驶员情况识别的准确性。另外,基于新的人为操作行为的知识库动态适应能力的在线学习能够支持情境识别。个性化情景识别的实验结果表明,个性化可以提高检测率,降低虚警率。总体而言,所提出的方法的实验结果表明在驾驶辅助系统中在线学习和个性化情况识别的重要性。
5 使用特殊类型的滑动模式控制器的混合动力四轮驱动车辆牵引力控制系统研制[4]
5.1 主要目的与主要原理
本文采用特殊类型的滑动模式控制器,开发了一种基于新型混合动力四轮驱动车辆的牵引力控制系统。本文所提出的控制系统有两个特点,其一:提出了一种在前轮处具有轮毂电机并且在变速器后部处具有离合器的新型电动动力总成体系结构,以用于提高最大牵引力。轮毂电机被控制在最佳滑动点附近循环。基于前轮的循环模式,定义了后轮的期望轮速。通过控制离合器扭矩来控制后轮以追踪定义的速度。与传统的TCS(Traction Control System)算法不同,所提出的方法利用离合器控制而不是制动控制。其二:提出了一种使用轮胎非线性特性的特殊类型的滑动模式控制器。所提出的滑动模式控制方法与其他常规反馈控制器之间的重要区别在于前者不依赖于反馈误差,但却可以提供相同的控制功能。
5.2 主要结论
使用本文所提出的方法与传统的方法相比,本方法所需要的调谐参数总数量显着减少。由于调谐参数的数量减少以及使用简单的分析控制算法,电控单元的计算负担可以显着降低。所提出的方法有望为新的TCS算法提供参考。尽管所开发的方法仅通过混合动力四轮驱动车辆进行了验证,但在不修改算法的条件下,纯电动车辆或装备有轮毂电机的车辆也适合采用所提出的策略。
[1]Narote SP,Bhujbal PN,Narote A S,et al.A review of recent advances in lane detection and departure warning system[J].Pattern Recognition,2018,73:216-234.
[2]Oh C,Choi J,Park S.In-depth understanding of lane changing interactions for in-vehicle driving assistance systems[J].International journal of automotive technology,2017,18(2):357-363.
[3]Sarkheyli-Hägele A,Scöffker D.Online learning for an individualized lane-change situation recognition system applied to driving assistance[C]//Cognitive and Computational Aspects of Situation Management(CogSIMA),2017 IEEEConference on.IEEE,2017:1-6.
[4]Han K,Choi M,Lee B,et al.Development of a Traction Control System Using a Special Type of Sliding Mode Controller for Hybrid 4WD Vehicles[J].IEEETransactions on Vehicular Technology,2017.



