人机协同信息化技术包含车内人机界面(HMI)和车外基于5G的V2X,其中车与人、车与移动设备、车与其他车之间的通信,均体现了协同驾驶信息系统的重要性。本文针对协同驾驶信息化技术进行了如下的总结:
1 协同信息系统提升驾驶安全和交通效率[1]
道路交通在拥堵、安全和环境影响等方面存在严峻的问题,随着移动通信、无线通信和遥感等技术的进步,智能交通系统(ITS)成为一种有前景的技术。开发新的交通系统,需要对感知和人为因素的评估进行研究,以获得最高的道路交通安全性及最优的驾驶员舒适度,而防止交通事故发生的解决方案之一是提供有关驾驶员周围环境的信息。
如今,AR使用嵌入式视觉技术,通过计算机生成图形来增强驾驶员对当前环境的感知,汽车制造商也一直将AR作为车载驾驶显示器下一代的可视化技术。基于AR-HUD的车辆安全信息系统可以将周围的交通信息叠加到用户视图上来增强ITS,并使驾驶员驾驶时保持注意力。本章提出一种基于AR和深度学习的创新智能驾驶员信息系统,用于识别道路障碍类型、解释和预测复杂的交通情况。目标是通过分析来自车辆外部的信息,系统可以主动地防止车辆事故的发生并改善驾驶员的安全性和体验。同时提出一个辅助系统,以便在挡风玻璃上提供有关网络拓扑的信息,增加驾驶员的可见度,避免在低能见度情况下发生交通事故。在障碍物类型、放置规则、可见性以及这些在车载显示器上的投影等方面,引入一种新的AR-HUD方法来创建实时交互式交通动画。所提出的协同驾驶信息系统如图1所示。
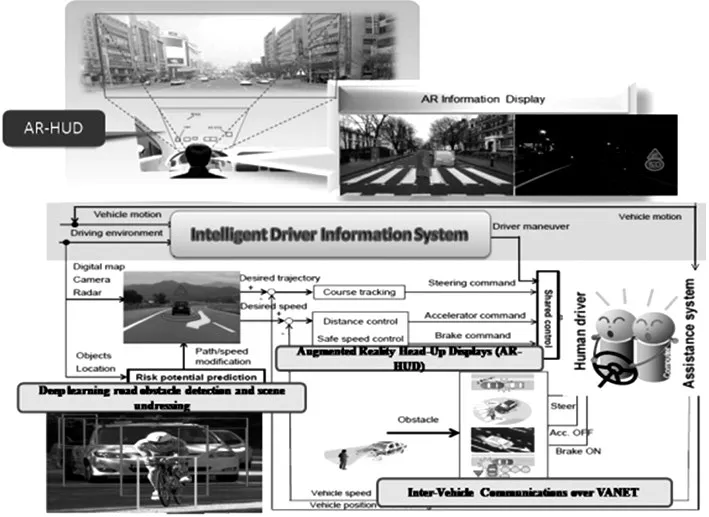
图1 协同驾驶信息系统[1]
提出一种定位图像中对象的新方法,其中单个卷积网络(CNN)同时输出多个预测的ROI和类别的置信度。单个CNN在每次评估中直接从整个图像预测感知域和类概率。为ROI中的每个单元引入二进制变量,首先进行网格单元分析,然后进行对象检测(图 2)。
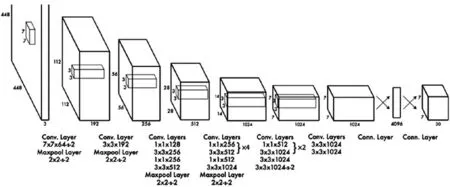
图2 深度CNN的物体检测体系构架[1]
由以上分析可知,车辆间视频通信视觉AR和基于传感器的系统与车辆的组合可以有效地减少交通事故的发生,即协同驱动系统是提高交通效率和道路安全可行的解决方案。
2 针对自主车辆研究的车载通信驾驶信息记录器[2]
为了开发自动驾驶系统,有必要连续记录驾驶信息。通常以一定时间间隔存储车辆状态信息和驾驶员操作信息,记录的车辆信息用于识别系统中各问题或不当操作的原因。驾驶信息记录可应用于多个领域,如自动驾驶系统研究中的问题分析和事故风险分析。作者研究对象为现代汽车公司生产的一辆小型电动轿车,安装了四台用于自动驾驶的PC,分别用于识别、计划、控制、存储驾驶信息。用于驱动信息记录的PC通过CAN(控制器区域网络)连接到车载网络,并通过以太网连接到其他PC。PC在自动驾驶系统启动时自动执行并记录必要的数据。
驾驶信息记录分为6类,分别为:记录时间间隔、驾驶模式、驾驶员输入、车辆运行状态、驾驶模式的变化信息、车辆路径中的对象信息。存储的驾驶信息记录通过组合每个信息,最终找出问题的原因。
3 基于人工神经网络和模糊逻辑的驾驶员分神判定与评估[3]
驾驶员分神(DD)定义为由于某些事件、活动、物体或人员,通过损害驾驶员的听觉、认知或视觉能力等,在车辆内部或外部延迟识别用于保持车辆的横向和纵向控制的安全信息,导致驾驶员将注意力从基本驾驶任务转移开。驾驶时与驾驶员执行的主要任务无关的活动则定义为次要活动。驾驶员有两种类型的辅助任务:与车辆信息系统(IVIS)的交互(如控制舒适性、娱乐性)与车辆物品(例如便携式电子设备、乘客等)的交互。本章介绍一种基于人工神经网络和模糊逻辑的鲁棒方法,用于检测、评估车载信息系统引起的驾驶员注意力分散。
DD检测和评估包括三个步骤[3](图3):
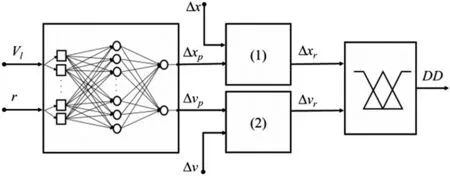
图3 DD检测和评估流程[3]
第1步是ANN预测特定路段上车辆的动态性能,即预测驾驶员在特定路段上的表现(维持速度在某一范围内且保持车辆在车道中间的能力)。
第2步是将预测变量与具有IVIS相互作用的实际驾驶性能进行比较。
第3步是FL-DD评估器具有“2输入-1输出”结构,采用五个对称的重叠在UOD的三角形隶属函数(MFs),保证输入具有相同灵敏度。同时,前馈ANN采用Levenberg-Marquardt方法进行训练,含有两个隐藏层,其中隐藏层采用的传递函数为双曲正切函数,输出层中采用线性传递函数。
4 人机协同信息采集的深层价值 [4]
有效的人机协作通过融合来自机器和人体传感器的“硬”和“软”数据,显着改善诸多学习和规划策略。信息价值(VOI)理论上是用于时序调整与人体传感器交互的关键性决策指标。作者Kin Gwn Lore[4]提出一种新的基于深度学习的VOI估计框架,可通过有效的在线推理和最小手动调整策略来调整协同人机感知。监督学习用于训练深度卷积神经网络(CNN),从通过数据融合获得的“图像”中提取分层特征(图4)。
研究将人类用作智能机器系统的“软数据传感器”问题,特别是考虑如何使用大量人类观察词来增加对可测量动态物理状态的估计,这些状态必须由机器使用的常规“硬”传感器数据连续监测(物体位置、速度、状态、温度、质量等)。
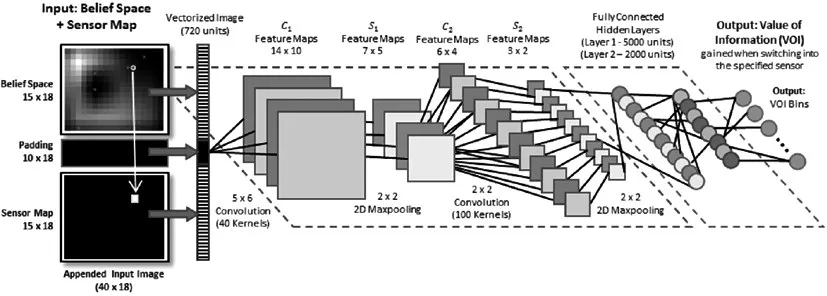
图4 用于奖励学习的CNN示意[4]
实现硬/软传感器的融合,数据融合中心可以随时间调整和执行信息量最大的语义查询,人类传感器可以用二进制形式进行回应。基于VOI的调整需要NP-hard贝叶斯算法,将其解释为部分可观察的马尔可夫决策过程(POMDP),允许通过值迭代来计算最优传感策略。
卷积神经网络(CNN)用于从图像中提取相关的分层特征以进行检测、分类和预测。CNN中,数据由每个隐藏层的多个特征映射来表示。在相应的隐藏层中,将多个滤波器卷积输入图像来获得特征映射,即输入图像与线性滤波器的卷积运算。评估CNN模型的性能并与AMDP进行比较,可知:CNN在环信息收集系统能够降低预期熵及目标MAP估计与真实目标之间的预期误差(见5和图6)。
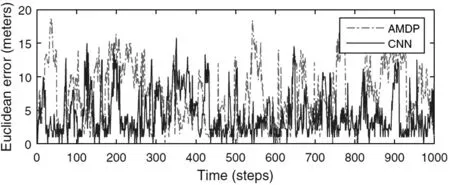
图5 MAP估计与目标之间的误差[4]
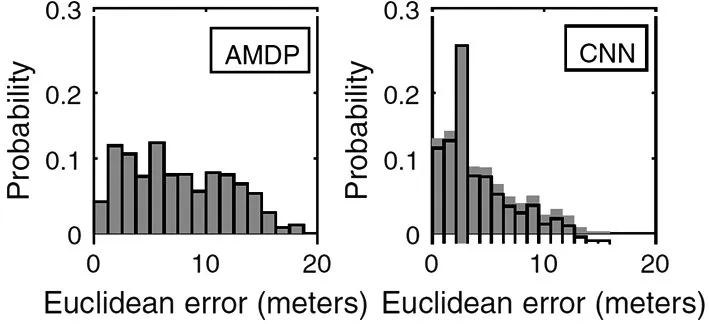
图6 MAP估计与目标之间的误差分布[4]



