孔岩
(吉林大学汽车工程学院,长春 130022)
主题词:氢燃料电池汽车 混合发电系统 能量管理控制策略
1 前言
近年来,随着石油资源的不断消耗,汽车行业专注于新兴的替代能源,以减轻对化石燃料的依赖及对环境的污染。在某种程度上,传统燃油汽车未来被新能源汽车取代将成定局。氢燃料电池汽车具有零排放、续驶里程长等优势,一直以来被视为终极环保汽车。
氢燃料电池汽车驱动系统大致可分为纯燃料电池驱动系统和燃料电池(Fuel Cell,FC)与辅助动力源组成的混合驱动系统两种形式。燃料电池发动机作为单一驱动动力源具有输出动态响应慢的缺点,为了改善系统的供电灵活性,延长燃料电池的使用寿命,目前氢燃料电池汽车大都采用以燃料电池为主,以储能电源为辅助动力源的混合发电系统[1]。
对于燃料电池混合发电系统,整车能量管理控制策略是其核心部分,即如何进行主动力源与辅助动力源能量的分配是需要解决的重点问题之一。
2 氢燃料电池汽车能量管理控制策略概述
在氢燃料电池汽车上,主动力源是氢燃料电池,可应用的辅助动力源包括蓄电池、锂电池、超级电容器(Ultracapacitor)、超高速飞轮等。Kasimalla,et al给出了FC与电池和超级电容配置图[1],见图1。
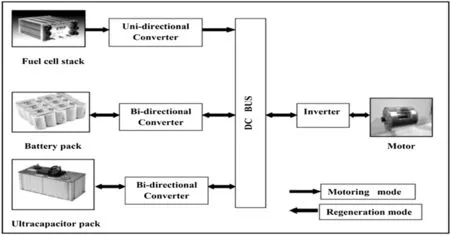
图1 FC与电池和超级电容配置图[1]
目前氢燃料电池汽车能量管理控制策略的控制模式大致分为阈值模式和功率跟随模式。阈值模式以最低氢气消耗量为目标对燃料电池进行最优控制,使其工作在最优效率点,即使燃料电池始终工作在相对低的氢气消耗区,由蓄电池/锂电池作为功率均衡装置来满足车辆的需求功率。功率跟随模式则是指当电池荷电状态(SOC)在最低值与最高值之间时,燃料电池的输出功率维持在某一设定的范围内,此时燃料电池在满足整车功率需要的同时对蓄电池进行能量补充使其处在最优SOC状态[1]。
针对以燃料电池为主、蓄电池/锂电池和超级电容器为辅的燃料电池汽车,在确定控制策略时应考虑各动力源的共性,需要满足电池的充/放电电流和功率限制值,且在超级电容突然充/放电的情况下,应确定电流变化的时间间隔并防止其损坏。具体的能量管理控制策略包括峰值动力源策略(Peaking Power Source Strategy,PPSS)、操作模式控制策略(Operating Mode Control Strategy,OMCS)、模糊逻辑控制策略(Fuzzy Logic Control Strategy,FLCS)、等效氢耗最小策略(Equivalent Consumption Minimization Strategy,EC⁃MS)。Hames指出4种控制策略的具体原理如下[2]:
a.PPSS通过使燃料电池和峰值动力源工作在最优工作区域来维持所需的驱动功率,且功率控制策略由车辆的加速和减速确定。
b.OMCS主要根据充电状态确定操作模式(快速充电模式、放电模式和充电模式),同时综合考虑需求功率、车速、超级电容器和电池充电状态。
c.FLCS旨在通过模糊逻辑控制器进行能量存储系统之间的功率控制,以提高燃料电池汽车的系统效率和燃料经济性,同时DC/DC转换器功率相对于燃料电池和蓄电池的能量达到最小/中间/最大水平,FLCS的控制回路如图2所示。
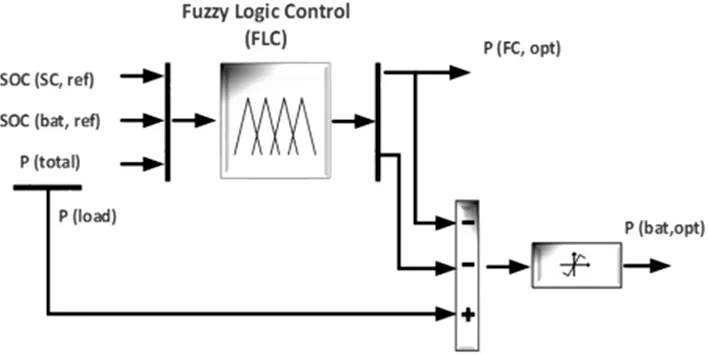
图2 FLCS的控制回路示意[2]
d.ECMS将电量转换为氢气消耗量,以系统等效氢消耗量最小为目标。ECMS根据锂电池/蓄电池SOC及需求功率,按照一定规则分配燃料电池和锂电池/蓄电池输出功率实现单位周期内系统氢消耗量最小,进而获得最优的燃料经济性和系统效率。其中,燃料电池汽车的等效氢消耗量C为[2]:

其中,

式中,CFC、Cbat分别为燃料电池和锂电池/蓄电池等效氢消耗量;PDC为与燃料电池级联的单向DC/DC变换器输出功率;m、n为待定系数,可通过测试单向变换器输出功率与氢消耗量辨识得到。
与OMCS类似,ECMS的控制回路如图3所示。
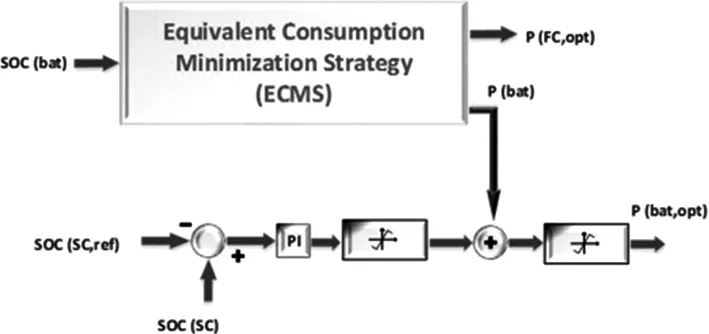
图3 ECMS的控制回路示意[2]
3 氢燃料电池汽车整车能量管理策略的改进
针对以燃料电池为主,锂电池/蓄电池和超级电容器为辅的氢燃料电池汽车,根据驱动条件、车辆运行状态变化(如起动、稳速、加速、减速、上坡、下坡等),可以得到车辆动力需求的变化。考虑到不同路况下的控制策略对整车燃料经济性及系统效率的影响,为了最大限度地减少氢燃料消耗并延长氢燃料电池汽车系统部件的寿命,Kaya提出了两种新型的能量管理控制策略:节省氢燃料控制策略(Hydrogen Fuel Sav⁃ing Control Strategy,HFS-CS)和节省生命周期控制策略(Life Cycle Saving Control Strategy,LCS-CS)[3]。
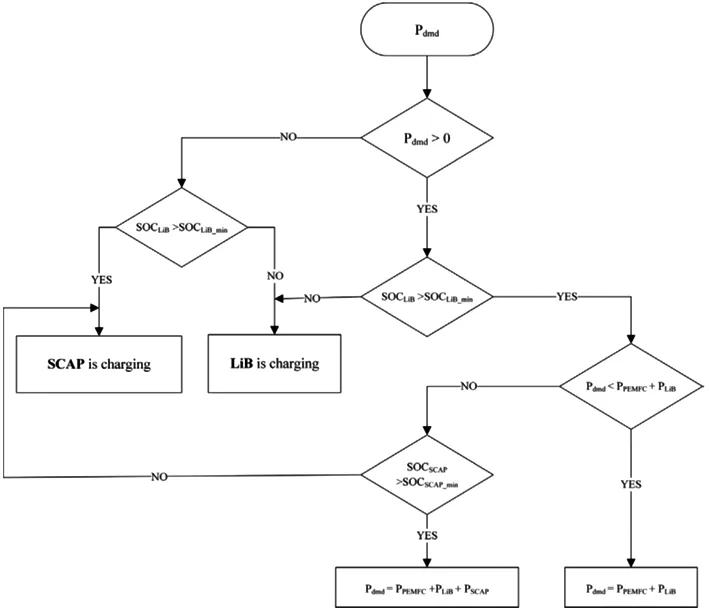
图4 HFS-CS 算法逻辑[3]
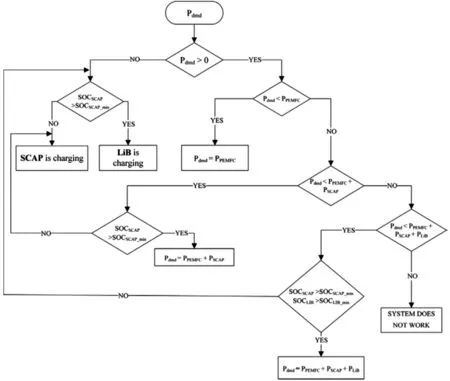
图5 LCS-CS 算法逻辑[3]
HFS-CS的目的是通过将电池和超级电容器更好地结合到系统中降低燃料电池的燃料消耗,利用车辆在锂电池/蓄电池和超级电容器中存储再生制动能量,保证车辆的燃料经济性,见图4。在车辆运行过程中,若电池SOC大于其最小值,车辆需求功率由燃料电池和锂电池/蓄电池提供;在高功率需求下,同时超级电容器也提供部分能量。在控制过程中:需求功率小于零意味着车辆停止或进行再生制动能量的存储,此时若电池SOC低于最小值,则系统对锂电池/蓄电池充电;当需求功率大于零时,若电池高于最低值时,燃料电池和锂电池/蓄电池将为车辆提供动力,在需求功率过大的情况下,3种动力源协同工作,共同为车辆提供动力。
LCS-CS中车辆的需求动力仅由燃料电池提供,除非有紧急的高功率需求,见图5。当车辆爬坡或加速时,超级电容器和锂电池/蓄电池分别作为辅助动力源提供动力,而在平坦路面上,车辆由燃料电池单独提供动力。在车辆急减速期间产生的再生制动能量将存储在超级电容器中;在弱制动和慢制动时,再生制动能量将存储在锂电池/蓄电池中,车辆重新起动时使用该能量。LCS-CS可以节省燃料并且延长了锂电池、超级电容器等组件的寿命。
为了确保各动力源之间能量的最优分配,且考虑到各组件的动态和能量约束,Snoussi提出了一种基于自适应滤波的能量管理策略[4],为了在能量流动力学和存储技术之间建立关系,引入特定频率(定义为功率密度和能量密度的比值)。为了提高系统性能,采用模糊逻辑系统(Fuzzy Logic System,FLS)使分离频率与系统状态变化相适应,其主要目标是优化超级电容器以使其工作在合理范围内(图6)。FLS的输入变量是超级电容器的SOC和负载电流,输出变量是分离频率,使用梯形隶属函数进行模糊化,并采用最小-最大模糊推理和质心逆模糊化。基于吸引性条件、存在性条件、稳定性条件3个主要条件建立滑动控制器以控制混合动力源中的电特性(电压和电流)。该控制策略可以较低的成本改善混合动力源的耐用性和自适应性,实现氢燃料电池汽车的在线能量管理。

图6 模糊逻辑系统[4]
4 结束语
燃料电池汽车作为新能源汽车发展的终极目标,目前已进入市场导入期,各企业、各研究机构致力于研究其能量管理控制策略以提高燃料电池汽车系统效率和整车燃料经济性,并延长各动力源的使用寿命。目前多采用FLCS、ECMS等控制策略,随着燃料电池技术的进一步发展,更全面的优化控制策略将会进一步提高氢燃料电池汽车的燃料经济性和整车系统性能。



