田思庆,郑家风,刘德胜
(1.佳木斯大学信息电子技术学院,黑龙江佳木斯154007;2.佳木斯大学机械工程学院,黑龙江佳木斯154007)
多媒体技术及其应用
基于神经网络的机械手臂运动轨迹分析
田思庆1,2,郑家风2,刘德胜1
(1.佳木斯大学信息电子技术学院,黑龙江佳木斯154007;2.佳木斯大学机械工程学院,黑龙江佳木斯154007)
针对机械手的强耦合、高度非线性的特点,根据神经网络控制理论,提出了一种基于神经网络的机械手臂控制方法。把神经网络作为机械手臂的关节伺服控制器,利用它强大的自学能力,实现对机械手臂运动位姿的快速调整,并对其学习算法进行适当改进,仿真结果证明该算法能够提高机械手臂运动轨迹跟踪的有效性和准确性。
机械手臂;神经网络;运动轨迹
机器人运动学主要是对机械手臂末端的执行器关节变量和位置姿势关系进行深入研究。机器人通常是由相应的移动关节和旋转关节关联组成并展开运动。这一运动轨迹具有如下特点:一端在支座上固定;另一个端点较为灵活自由,可以任意安装不同工具,实现不同功能的操作目标。首先,利用驱动器运作关节带动相关联运动杆,使得机器人手臂最终运作到末端位置,保证执行器达到预期目标姿势要求。
1 机械手臂运动学模型
在机械手臂运动学理论基础上,构建机械手臂运动学模型。通过神经网络运动模型展示图,得出机械手臂处于自由运作和协同运作时,可以有效完成既定的任务要求。对于手臂运作期间算法统计和计算,要结合两个手臂不同位置和模型特点,把两个手臂之间的坐标和运动模型进行转变。转变后的双臂,作为运动协调的基础。双机械臂运动学模型建立,要把单机械臂运动模型作为基础,在已知其中一个手臂关节运动空间后,还需进行单机械臂正向和逆向运动学分析。为了实现机器人手臂服务作业任务,机器人手臂应该具备在运动空间中,可以利用任意形式和姿态运作的能力。因此,实践研究后,在机械手臂运动模型构建期间,设置两个手臂的自由度为4,在手臂末端位置,设置一个夹持机构。其四个自由度设置主要包括肩抬、肘部转动、腕部摆动、手臂末端摆动。4自由度机械手参数如表1,神经网络系统机械手臂处于ADAMS中的简化运动模型展示图如图1。
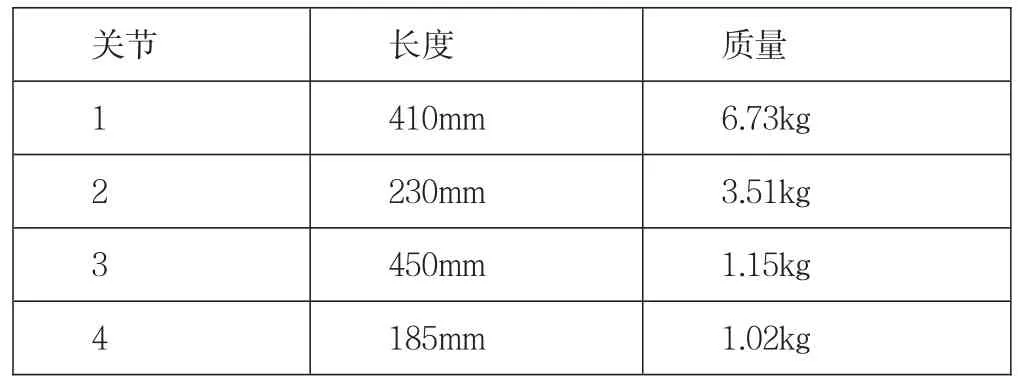
表1 4自由度机械手参数

图1 神经网络系统机械手臂处于ADAMS中的简化运动模型展示图
对于4自由度机械手可以用拉格朗日方程

用直流伺服电机驱动4自由度机械手臂,在不同机械手臂关节,都装载一个电机。机械手臂对伺服电机重量具有极高要求,既需要其输出功率高,又需要重量轻。在运动学模型建立期间,可以选择Maxon这一类空心型机械手臂,其电机具有质量好、重量轻、功率密度大,和谐波减速器整合应用,效果较好。谐波减速器间隙小、刚度大,满足机械手臂运行需求,利于机械手手臂末端的手爪驱动舵机。神经网络机械手臂运动模型建立,也要处理好关节问题[2]。因为,就机器手臂运动学的研究来说,不仅是研究运动和关节的作用,也需研究各个关节之间变量在运动期间关节偶合力和力矩变化的特点.一方面,在已知机械手臂各个关节力矩和作用力基础上,求出机械手臂各个关节运行轨迹,获得机械手臂不同关节运行速度、位移。另一方面,在知道机械手臂不同关节运行轨迹基础上(速度、位移)后,统计出机械手臂不同关节的力矩与作用力。其中,就动力学来说,前者属于正问题,后者则属于逆问题。但是为了保证机械手臂动力模型建设科学性,正问题和逆问题均不可忽视。
2 神经网络控制
神经网络是以并行形式分布的数据信息处理网络。神经网络系统主要是从两个方面开展,包括从结构、功能上进行模拟。但就神经网络功能模拟的实现还是具有一定难度。依据以往神经生理学经验给出,神经网络包括动物神经元和人工神经元,人类大脑神经细胞中基本单元,是动物神经元系统功能体现,动物神经元是神经系统基础结构单位。人类大脑神经元具有复杂性特点,在人类大脑中,不同的神经元之间进行联系,会依据外部环境激励信号作出反应,出现相应变化[1]。人工神经元是建立在生物神经元基础上,模拟动物神经元,进行多输入和单输出的非线性信息处理。典型的人工神经元模拟展示图,如图2所示。
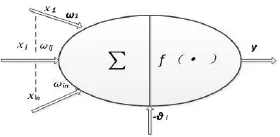
图2 典型的人工神经元模拟模型展示图
神经网络的自我学习,是指利用相应的学习算法,对权值调整和优化,使其达到具备识别、记忆、问题优化、信息处理等功能。具体来说神经网络主要分为有导师学习、无导师学习与强化学习。无导师学习方法只提供输入信息,而无相应的输出数据。网络检查输入、输出数据、信息趋向和规律,会依据网络自身功能进行调整。在这种学习形式背景下,网络不再是单一依据外部影响对权值调整。有导师的神经元学习方法,可以把期望的输出和实际输出信号对比分析和调整,直到达到最初的权限数值,缩短权值差异。在实际学习期间,必须重视权值的调整,实现学习目标,根据误差代价函数:

式中ydi和yi分别表示期望输出和实际输出,能够减少实际的输出和预期输出之间的误差。
3 基于神经网络的机械手臂运动轨迹规划
3.1 神经网络的机械手臂运动轨迹规划算法
本文主要是对基于神经网络的机械手臂协调作业运动轨迹进行规划。首先需要设置一个机器人双臂运作任务作为目标。要求在运行期间,获得目标物体坐标信息后,双手紧紧握住目标物体,双臂整合,对目标物体进行移动。当机器人双臂拥有4自由度时,在协同刚性运作目标物体期间,运动轨迹规划必须基于单自由度手臂运作轨迹基础上。机械手臂分为主臂和从臂。从运动学角度分析,要考虑到机械手臂类型,确保手臂在运作期间,运动轨迹和姿态协调性,当双臂在运作时,运作轨迹是相互对应的关系。因为主臂和从臂工作空间相同,因此在运动轨迹运作期间,也要考虑到双臂的运动碰撞性,保证其中一个手臂在运作期间,另一个手臂不会与其发生碰撞[3]。
双臂的协调运作实现方法包括以下几个步骤:首先结合运动学模型构建机械手臂和目标物体;其次对目标物体详细分析,对笛卡尔空间线路特点规划处理;然后轨迹规划要保持平稳性;接着结合笛卡尔空间布局规划特点,把逆运动学转化为关节空间的规划;最后对双臂开展碰撞检测工作。
3.2 神经网络的机械手臂运动轨迹协调规划
机械手臂运动轨迹协调规划,是计算其运行轨迹线路的体现。机械手臂在一定的时间内,受到位移、加速度、速度等客观条件约束和限制,从最初状态变化为某个预期特定目标状态。对机器手臂的规划主要包括以下两种方法,本文采用第二种方法。
第一种方法:要求应用人员沿着运行轨迹中预先选定的位置(也被叫做插值点和结节)显示地,确定广义运行轨迹坐标具体位置、加速度、速度的一组约束。例如:光滑程度和连续性等。其次,发挥轨迹规划器的优势,从具体插值与满足在插值的约束函数中,选择和确定参数变化轨迹。在实验研究后,明显可以看出,这一机械手臂轨迹规划方法,操作其运作轨迹的设置和约束力的给定,是在机械手臂关节坐标系中开展[4]。

图3 关节1轨迹跟踪曲线

图4 关节2轨迹跟踪曲线

图5 关节1跟踪误差曲线

图6 关节2跟踪误差曲线
第二种方法:应用人员需优先解析函数并明确操作设备是必经之路。例如:在笛卡尔坐标系中,坐标体系的直线路径。其次,在明确笛卡尔坐标体系特点后,规划机械手臂运行坐标,结合坐标明确一条和给定线路相似轨迹。在这一方法中,机器人仅可以确保在运行期间,经过这两个不同点,但是无法保证这两点期间路径。因此,可以说这两个点之间路径无法确定。
3.3 笛卡尔空间轨迹路径规划
在机械手臂运作期间,作业目标是利用机械手臂末端执行设备,对设备中笛卡尔系统坐标序列点定义,明确节点的位置。节点是操作手臂系统末端执行器位置和姿势的齐次变换运作矩阵。要求坐标节点之间在过渡运动时,双臂末端执行器以直线形式运行,始终保持直线的轨迹。利用笛卡尔方法对机械手臂运动轨迹规划,大部分的优化和计算是在笛卡尔坐标系统中计算处理。其次,依据特定的取样和间隔,在预先设定的线路路径中,设置插值点、在控制机械手臂同时,把机械手臂转为和手臂关节具有联系性的变量,获得轨迹,但是要明确说明,获得的变量轨迹,与分段直线形式类似。因此,就机械手臂来说,其实现空间轨迹运行的过程,就是实现轨迹的离散点的过程。如果机械手臂运行期间,离散点大,运行轨迹误差就大。只有保证这些不同离散点距离接近,才能确保机械手臂运行轨迹满足预先轨迹精度要求[5]。
4 仿真结果
采用matlab软件对机械手臂的两个关节进行模拟仿真,用于仿真的机械手的参数为m1=6.73kg和l1=410mm,m2=230mm。图3和图4分别给出了关节1和关节2的跟踪轨迹曲线,图5和图6给出了关节1和关节2的跟踪误差曲线,从仿真结果可以看出神经网络能够在短时间内快速准确的规划出运动轨迹并完成运作要求。
5 结论
本文主要通过建立机械手臂运动学模型,并基于神经网络控制,通过神经网络的自身学习特点,不断对权值进行调整,使得误差趋近于零。采用matlab软件对机械手臂运动轨迹进行模拟仿真,结果证明机械手臂能够快速准确地按照预定轨迹完成运作。
[1]黄天鹏,张华,黄威,等.基于表面肌电信号的上臂动作识别研究[J].南通大学学报:自然科学版,2013,(1):14-17.
[2]熊大柱.一种7自由度生机电假肢手臂的结构设计及运动学分析[D].华中科技大学,2013,(7)73-75.
[3]梁捷,陈力.柔性臂空间机器人基于虚拟力概念的神经网络L_2增益鲁棒控制[J].机械工程学报,2012,(23):23-29.
[4]梁捷,陈力,梁频.柔性臂空间机器人的神经网络自适应控制及振动模态分级模糊控制[J].计算机集成制造系统,2012,(9):1930-1937.
[5]沈勇,聂余满,陈峰,等.双关节测力机械臂设计与控制方法研究[J].自动化与仪表,2006,(3):1-3+11.
TP391
A
1009-3044(2017)24-0180-03
2017-07-02
佳木斯大学应用重点项目(12Z2201526)
田思庆(1965—),硕士生导师,教授,研究方向为农业电气化与自动化;通讯作者:刘德胜(1979—),硕士生导师,副教授,研究方向为智能控制。



