王巍 朱天宇 黄志刚 王孟 张帅

摘要:地面监测系统在UAV自主导航与多设备协同通信中充当着重要的角色,监测站可完成对UAV的飞行姿态、参数调整、信息获取以及航线的手动规划。本文提出一套适用于UAV自动导航系统的地面监测站,该系统包括UAV基础参数监测、编队状态监测、图像数据接入等功能,依托数字信号传输设备与数字图像传输设备完成地面战与UAV的实时通信。测试结果表明,本文所设计的地面监测平台可满足UAV在自主导航时的信息监测需求。
关键词:UAV地面监测站;参数监测;自动导航;实时通信
中图分类号:TP391.4 文献标识码:A
文章编号:1009-3044(2020)19-0026-02
开放科学(资源服务)标识码(OSID):
1 背景
UAV的灵活性、易操作等特点使之在农业植保、电力巡检以及工业测量等领域发挥着重要的作用,针对不同工作环境的无人机系统配置相对属性的UAV地面监测站。无人机的小型化发展,造价成本越来越低,以及可控性越来越好,无人机在公共和民用上的应用也越来越多[1]。无人机的飞行参数及机载传感设备信息通过地面站获取,操作手可通过地面站在完成无人机的传感器矫正以及姿态控制等航迹规划_T作,航迹规划(tra-jectory planning)是指在初始状态、任务目标、威胁区和一些已知环境信息的情况下获得性能最优的规划问题,是任务规划系统的关键技术之一[2]。因此,UAV地面监测站在无人机应用系统中充当着重要的角色。
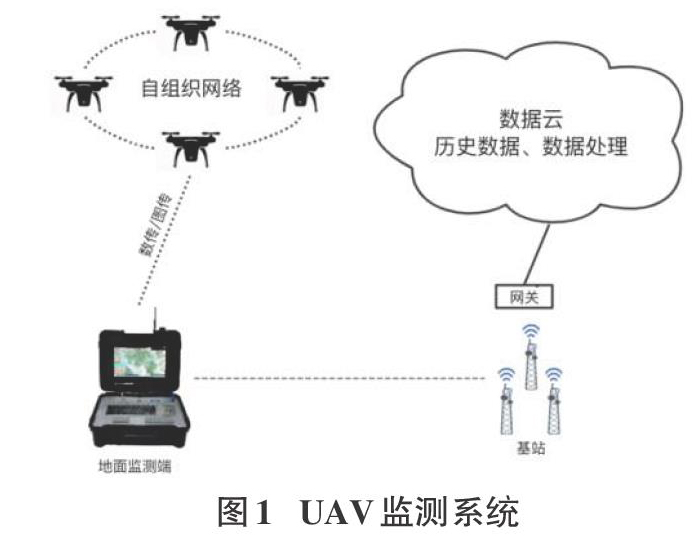
常用的UAV监测系统主要构成由下图1所示,空中部分由无人机搭载无线传输设备以及供电部分组成,地面监测终端由地面站可视化终端、信息传输服务器组成。无人机由UVA集群组成,机载视觉、激光雷达等设备;地面站在无人机的控制与协同通信的信息中转站,负责完成对无人机集群的控制以及信息的管控,旋翼无人机的近地面空间应急物联网在缺少地面基站和能量受限的情况下,可靠节能地远距离传输重点区域全信息的要求,需要地面监测端与无人机集群的协同通信[3];服务端负责数据的收集与存储,部分数据处理过程再服务端中进行。
2 无人机监测系统的设计
UAV地面监测系统主要结构分为数据层、分析层以及可视化界面三部分构成。数据层负责接收并管理无人机系统的参数与采集数据,采用MySQL数据库实现;分析层进行数据分析与传输,地面站通过数传与数字图传与无人机通信,整体数据链路的协调与控制由分析层处理;可视化界面依托Qt完成主从窗体以及控件的设计。
2.1 系统功能设计
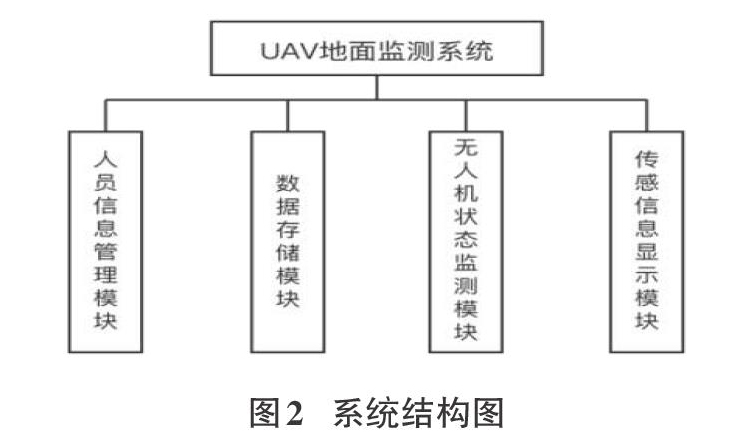
无人机监测系统主要由人员信息管理模块、数据存储模块、无人机状态监测模块、图像与机载传感信息显示模块四部分组成,其系统结构图如下图2所示。
1)人员信息管理模块。人员信息登录模块负责管理用户信息数据,依据不同权限显示相应无人机监测数据,例如最高管理员权限可查看无人机建图状态。
2)数据存储模块存储模块。用于存储登录用户的信、编队状态参数以及无人机的传感参数的历史数据,并可保存激光雷达与视觉相机建图的pcd点云文件。
3)无人机状态监测模块。负责显示无人机飞控搭载的IMU、气压机以及罗盘的相对信息,操作人员可依据地面站显示的状态参数完成无人机的手动控制与任务部署。
4)图像与机载传感信息显示模块。完成无人机的视频信息可视化,实时展示在飞行过程中2D图像中元素的识别以及3D点云地图的构建过程。
2.2 客户端可视化设计
客户端可视化通过Qt进行GUI设计,使用Qt以及第三方控件进行GUI以及数据读写开发,Qtopia Core是挪威Trolltech公司发布的一款基于嵌入式Linux的面向单一应用的嵌入式产品的Qt开发平台,它的前身是Qt/Embedded(常简称为Qt/E)c4]。地面监测站GUI信息显示主界面如下图3所示。参考开源的地面站上位机,首先创建好窗体对象MainWindow,根据地面站的设计将文字、按键、媒体控件部署在窗体上,其次根据后台的数据交互逻辑创建对应的信号与槽,最后将GUI文件在后台调用,根据槽函数设置对应的交互关系。
2.3 通信数据链路设计
各类无人机用途及结构各异,但其链路通信特点可归纳为以下几个方面:无物理防护边界、处于强干扰环境、信道资源受限[5]。通信数据链路地面站与无人机通过数传完成飞控传感数据的传输,机载Jeston TX2与数传串口通信,采用传统的Ma-vlink作为传感数据传输协议,按照每帧14字节发送数据至地面站,图像数据由TX2板卡将数据通过4G图传传输至地面站系统。地面站负责接收建图的数据以及UAV相关一维传感数据,并定期将数据传输至服务器进行数据备份。
3 系统测试
本文提出的地面监测系统依托实验室现有的无人机平台进行试验测试,如图4所示,无人机平台包括一架农业植保无人机、两架辅助僚机以及定位视觉等传感器模块。
下图5(a)为无人机控制界面,负责完成无人机(主机)的手动飞行、一键起降、飞控数据保存以及PID等参数设置(需在起飞前完成设置);5(b)为无人机数传/图传设置界面,可进行3套数传一套图传的通信调试,GUI中间与右边部分显示主机与僚机回传的姿态信息;5(c)为主机搭载的深度相机2D图像处理的实时结果,通过PyTorh+YOLOv3实例分割框架完成常规环境元素的目标检测,并将识别到的信息标记并保存到历史记录;5(d)为地面站同时可对服务器中存储的点云数据进行访问。
4 结束语
本文依托现有的无人机平台提出了一套UAV地面监测系统,该系统包括UAV基础参数监测、编队状态监测、图像数据接入等功能,依托数字信号传输设备与数字图像传输设备完成地面战与UAV的实时通信。测试结果表明,该系统功能完善,实用性强,实时将无人机编队系统的传感器以及飞控信息传输至服务器存储,对于无人机导航系统、工业巡检以及农业植保行业有着重要的用途。
参考文献:
[1]邹玉龙,姜晓,朱佳.下一代无人机群协同通信网络[J].南京邮电大学学报(自然科学版),2017,37(03): 43-51.
[2]许洋,秦小林,刘佳,张力戈.多无人机自适应编队协同航迹规划[J/OL].计算机应用.
[3]王巍,彭力,赵继军,朱天宇,崔益豪,田立勤.基于旋翼无人机 近地面空间应急物联网节点动态协同部署[J/OL].自动化学报,
[4]喻晓,夏澎.基于Qt的便携式心电监护仪GUI应用软件设计[J].计算机系统应用,2017,26(5):221-226.
[5]吴颖,刘照亮,康令州,刘欢,朱江.MAVLink链路通信协议安全分析[J].通信技术,2019,52(4):946-950.
【通联编辑:唐一东】
基金项目:国家重点研发计划(2018YFF0301004);国家自然科学基金(61802107);教育部一中国移动科研基金(MCM20170204);河北省自然科学基金(F2015402108);江苏省博士后科研资助计划项目(1601085C)资助
作者简介:王巍(1983-),男,河北邯郸人,副教授,博士,CCF会员(51272M),主要研究方向:公共安全物联网、隐式人机交互;朱天宇(1996-),男,江苏省徐州人,硕士,主要研究方向:计算机视觉,人工智能,无人驾驶。



