闫泽双 孙国明 孙照成 张桂昌
1.烟台海德专用汽车有限公司 山东烟台 264000
2.中国民航大学 天津 300000
随着社会经济的发展,人们对于物质文化环境的需求日益提高,以政府职能的转变、环卫市场逐步释放为背景,环卫市场容量在2020年达到2 000亿元,上海、深圳等地率先实施垃圾分类,餐厨垃圾和湿垃圾作为单独的垃圾分类存在数量巨大、含水率高、易腐败产生毒素和恶臭气体等特点,其运输过程中的“跑冒滴漏”成为影响城市市容市貌的重要因素,传统的侧装式餐厨垃圾车以及后装式垃圾车已无法满足需求,后装式餐厨垃圾车应运而生,并逐渐受到市场的青睐。
后装式垃圾车的上料机构作为该车的主要功能实现机构,使用频繁,是设计过程中最主要的关注点。本文针对上料结构上料过程做了动力学计算模型,得到相应的载荷曲线,选取其中受力最大的四个位置进行了静力学分析,并应用动静态应力应变仪对应力较大区域进行了应力应变测试,印证了计算模型的准确性,以计算模型中的最大应力作为结构校核的最终应力,为后期结构优化提供数据支撑。
1 工作过程分析
后装式垃圾车的上料机构为一个平行四连杆机构,结构简图如图1所示,分别由举升杆、翻转杆、举升油缸、翻转油缸、垃圾桶固定支架等结构组成,其主要运动副包括:举升杆与箱体转动副、举升缸活塞杆与举升杆转动副、举升缸与箱体转动副、举升杆与垃圾桶固定支架转动副、翻转油缸与箱体转动副、翻转杆与垃圾桶固定支架固定副、举升缸与翻转缸各自活塞缸和油缸之间滑动副。左右两侧共建立7个固定副、12个转动副、4个滑动副,动力学模型如图2所示。
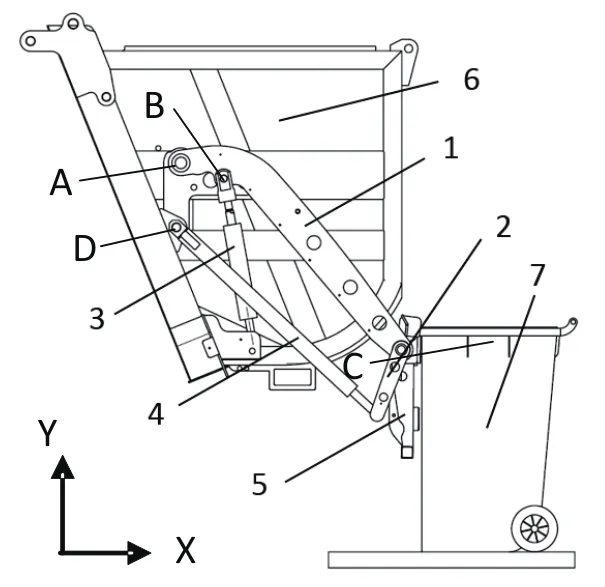
图1 上料机构简图
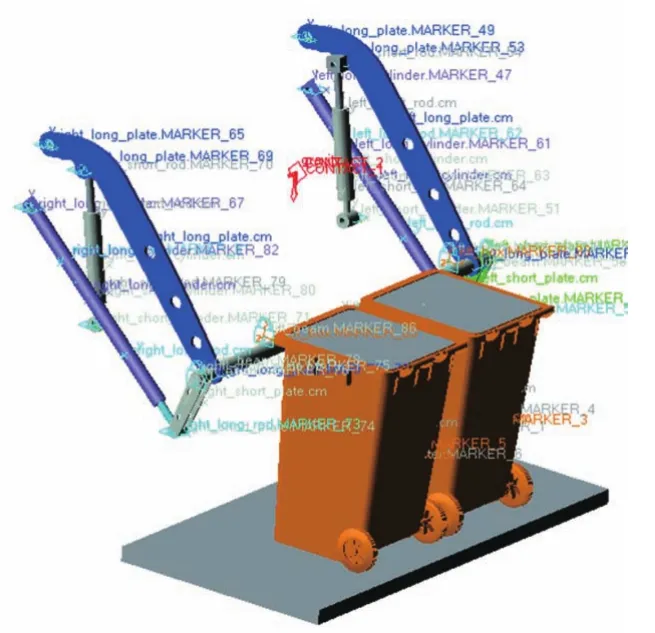
图2 机构动力学模型
对油缸与活塞杆的4个滑动副施加运动驱动,提升机构提升垃圾桶和翻转垃圾桶,以速度的形式驱动,经过测量,垃圾桶提升总共需要12.4 s,活塞杆伸出233 mm,垃圾桶翻转总共需要9 s,活塞杆伸出549 mm,将其运动速度简化为加速-匀速-减速的过程,使用STEP函数定义驱动速度,函数如下:
举升缸的速度驱动函数:
step(time,0,0,2,0)+step(time,2,0,4,21.6)+step(ti me,4,0,13.2,0)+step(time,13.2,0,14.4,-21.6)
翻转缸的速度驱动函数:
step(time,0,0,14.4,0)+step(time,14.4,0,16.4,78)+step(time,16.4,0,20.4,0)+step(time,20.4,0,23.4,-78)
该模型中结构件密度为7 800 kg/m³,垃圾桶密度为900 kg/m³,垃圾桶中的垃圾密度为1 000 kg/m³,假设提升垃圾桶和翻转垃圾桶时,桶内的垃圾不撒漏,不减少。仿真计算后提取ABCD载荷曲线如图3~图6所示(ABCD四个位置详见图1)。
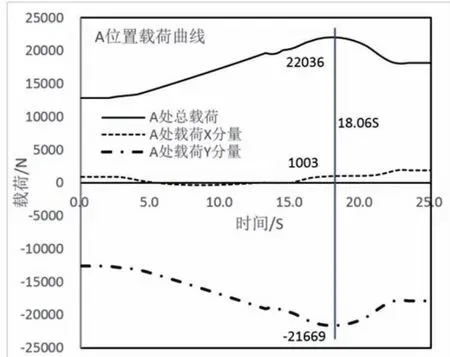
图3 A位置载荷曲线

图4 B位置载荷曲线
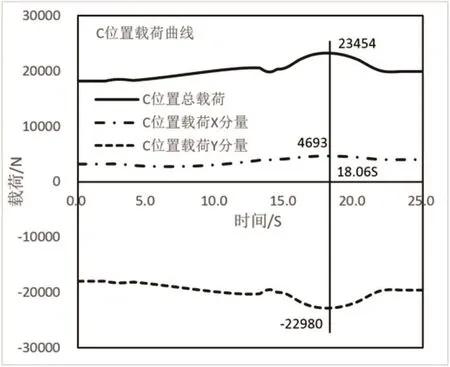
图5 C位置载荷曲线
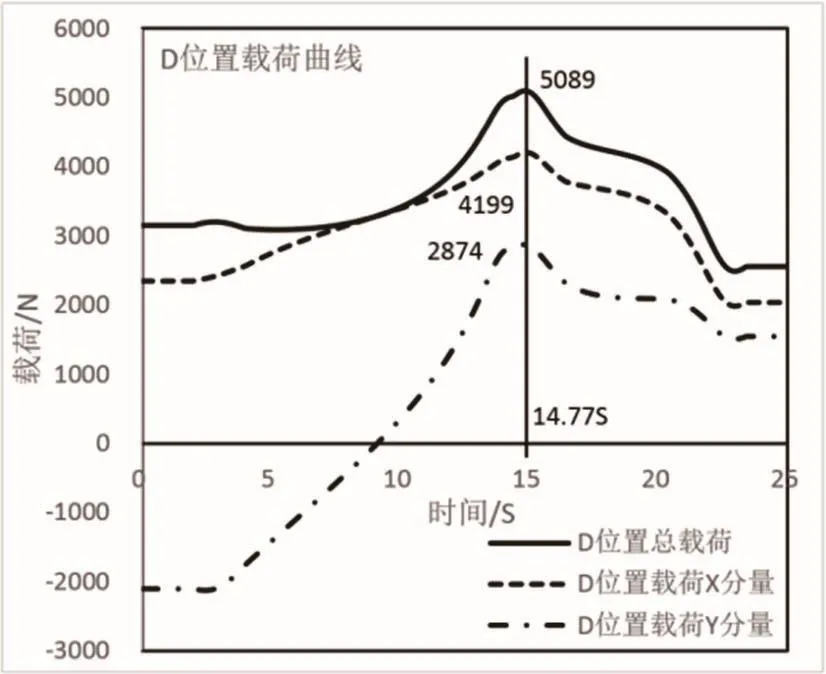
图6 D位置载荷曲线
从各运动副之间的载荷曲线可以看出,A位置载荷最大的点位于18.06 s,载荷大小为22 036 N,其中X方向为1 003 N,Y方向为-21 669 N;B位置载荷最大的点位于18.06 s,载荷大小为23 454 N,其中X方向为-4 693 N;Y方向为22 980 N;C位置载荷与B位置相同,大小相同,方向相反;D位置载荷最大点出现在14.77 s,载荷大小为5 089 N,其中X方向为4 199 N,Y方向为2 874 N;D位置在18.06 s时,载荷大小为4 223 N,其中X方向为3 652 N,Y方向为2 120 N,载荷相差较小,且ABC三个位置与D位置相互影响比较小,因此计算时不考虑最大载荷出现在不同时刻的问题,将各位置最大载荷同时作用在箱体相对应位置。
2 静力学分析
2.1 箱体静力学分析
简化箱体模型中的小结构,去除非重要部分的圆角、小孔等特征,将数模导入至Workbench。对各零部件设置材料属性,各零部件均采用Q235B制作,其密度为7 800 kg/m³,泊松比为0.3,屈服强度为235 MPa,抗拉强度不低于375 MPa,许用应力按235 MPa计算,薄壁零部件简化为壳体,建立实体之间的接触、壳体与壳体之间的接触、壳体与实体之间的接触。壳体文件划分面网格,实体零部件划分以六面体网格为主的非结构化网格,对重点应力考察区域的零部件设置网格尺度为2 mm,对非重点考察区域的零部件设置网格尺度5 mm,共形成681881个网格,33 343 279个节点。约束结构的上下底面,并对相应位置施加第1节得到的载荷。计算后得到应力云图如图7所示。
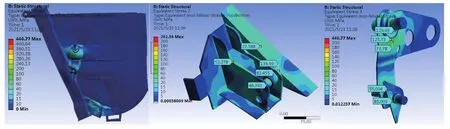
图7 箱体A C D三位置应力云图
从应力云图分析,除去应力奇点440.77 MPa,A区域最大应力为129.93 MPa,安全系数为1.8,D区域最大应力为85.003 MPa,安全系数为2.7,C区域最大应力为136.99 MPa,安全系数为1.71。
2.2 举升杆静力学分析
与2.1节方法相同,建立举升杆应力计算模型,网格尺度设置为2 mm,共形成47 581个网格,48 539个节点,施加第1节得到的载荷,计算后得到应力云图如图8所示。
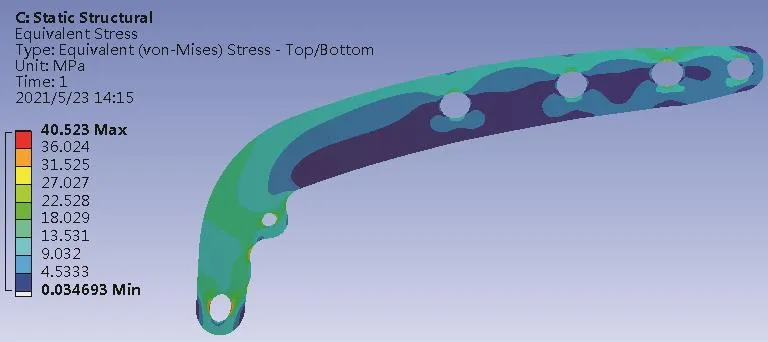
图8 举升杆 B位置应力云图
从应力云图分析,B区域最大应力为40.52 MPa,安全系数为5.8。
3 应力应变测试
根据第2节中得出的应力计算结果,选取对应位置进行应力应变测试,主要采用设备为动静态应力应变仪、应变花等,选取ABCD四个位置周边应力较为均匀区域进行测试,应变片粘贴位置如图9所示。
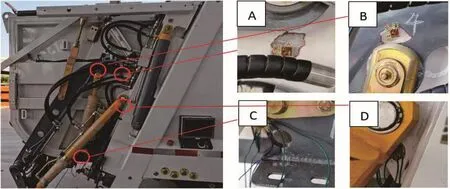
图9 应变测试位置
将垃圾桶内装满水,测试整个垃圾桶提升过程及垃圾桶翻转过程中的X、Y、45°三个方向的应变,并依据二向胡克定律计算得出最大主应力与最小主应力,再依据第四强度理论计算得到米塞斯应力。对比同一时间同一位置处的测试应力与计算应力,误差在5%以内,证明了静力学计算的模型的准确性,测试位置对应计算应力图及测试应力与计算应力对比如图10、图11所示。
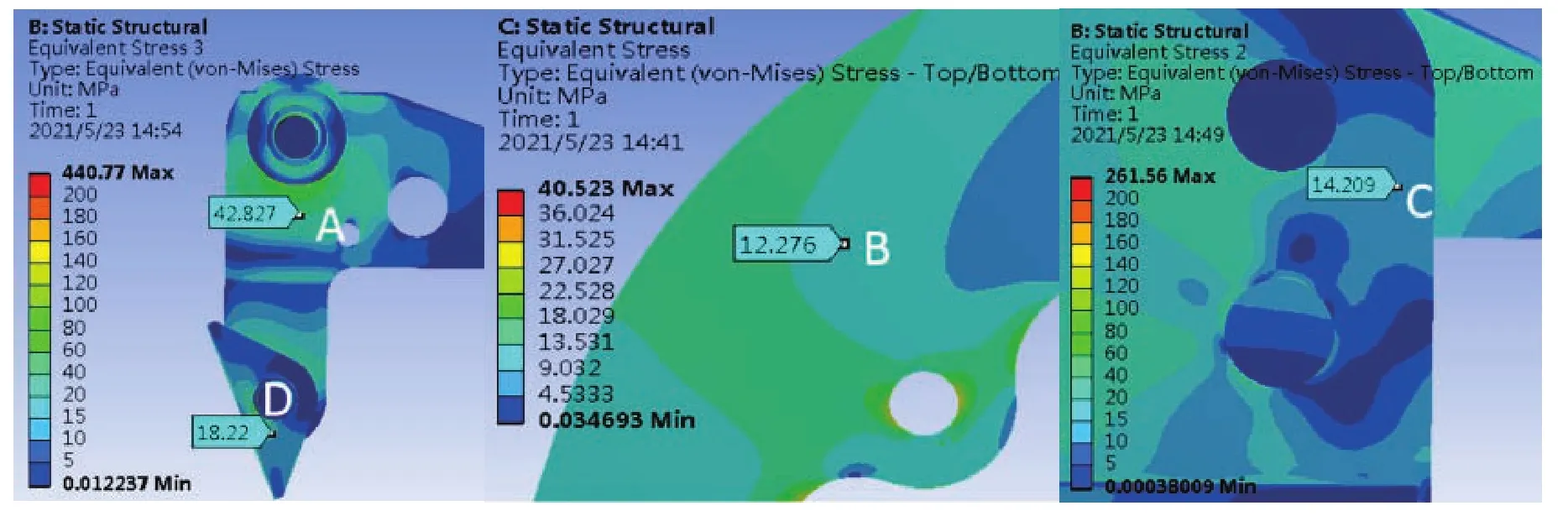
图10 ABCD测试点对应计算应力
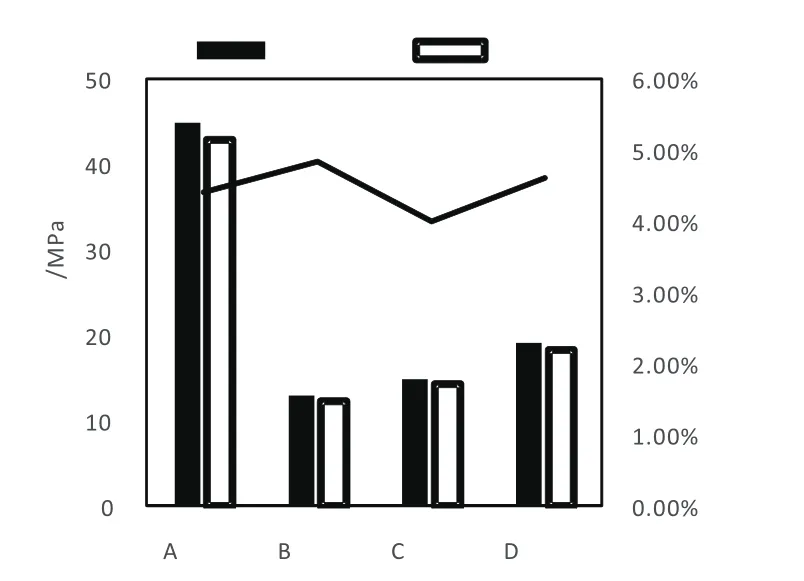
图11 测试与计算应力对比图
4 结语
本文应用Adams及Workbench完成了后装式无泄漏餐厨垃圾车垃圾桶提升机构的动力学模型载荷提取和静力学强度计算,对比应力应变测试结果与计算结果,印证了计算模型的准确性。根据静力学计算的结果可知,目前该机构强度满足使用要求,安全系数分别为A区域1.8,B区域5.8,C区域1.71,D区域2.7,B区域与D区域存在轻量化的空间。



