吉 春 平
(阳泉煤业集团翼城上河煤业有限公司,山西 临汾 043500)
对大型贯通测量中加测陀螺定向边的重要性分析
吉 春 平
(阳泉煤业集团翼城上河煤业有限公司,山西 临汾 043500)
结合阳煤集团二矿470水平15号煤十采区轨道巷与二矿龙门立井贯通的实例,通过导线平差各项参数的选择,从加测陀螺定向边和不加测陀螺定向边两方面对贯通精度的影响做出了分析比较,指出在相同的观测方法和条件下,合理加测陀螺定向边能大大提高贯通精度。
陀螺定向,误差预计,中误差,重心
近年来,随着国民经济发展,矿山开采也迅速发展起来,由于井田范围不断扩大,井下巷道的开拓也越来越趋于特长化。在大型巷道开拓中,常常需要联测导线来控制地面和地下施工。而井上下经纬仪导线测量误差的累积影响比较严重,不可避免的造成远离起算边的控制导线精度逐渐降低,而陀螺定向边误差不累积是相比导线测量的最大优点,从而可以大大地提高导线控制的精度。
1 项目介绍
根据阳煤集团二矿井巷开拓总体设计,二矿470水平15号煤十采区轨道巷向西掘进将与二矿已掘龙门立井形成定点贯通,龙门立井到位后的实测井筒中心坐标值即为实际贯通相遇点K的纵横坐标值,由于十采区轨道巷开口掘进起算数据是从主工业广场材料斜井导线传算而来,因而至龙门立井井上下贯通导线长达19 km,其中井下导线长达10 km,是阳煤集团近年来导线最长的两井间大型贯通测量工程之一,根据设计要求贯通水平偏差不大于±0.5 m。本工程共加测三条陀螺定向边(“S12—S13”,“S21—S22”和“S32—S33”),这就使整个贯通路线被分为5个区段,第一段为地面近井点“二矿”至测点S12,第二段为测点S13至测点S21,第三段为测点S22至测点S32,第四段为测点S33至K,第五段为地面近井点“龙近2”至K。由于材料斜井侧起算方位来源于GPS控制边“二矿—丛树垴”,所以整条线路就由3个方向附合导线段和两个支导线段组成。第一至第三方向附合段的重心分别为O01,O02和O03。
2 陀螺仪作业方法的选择及注意事项
由于煤矿井下具有震动大、人来人往等恶劣的环境条件,加之阴暗、潮湿、空间活动范围小等多种因素的综合影响。考虑到逆转点法观测时观测者整个观测过程都需要注意力高度集中,而中天法观测时观测者只需要在读取中天时间和最大摆幅时集中注意力即可,这样在同等外界条件下中天法观测较逆转点法观测者能够更好的应付外界来往人员及其他突发事件的干扰,同时观测者不会因为长时间注意力高度集中而疲劳,进而提高了观测效率。因此,本项目陀螺定向采用日产索佳SET3130R3(NO37759)+GP1(NO96736)陀螺定位仪,通过中天法以3-2-3的作业顺序施测,且每条定向边独立观测两次。
由于陀螺仪的精密性,震动和外界环境变化等都可能对观测精度造成影响,因此陀螺仪在搬运和作业过程中都要避免磕碰,特别是作业过程中,一旦加以外力,很有可能对悬挂带等造成损坏。同时为了尽可能避免外界环境变化的影响,一个完整的3-2-3观测必须在72 h内完成,尽量避免外界及人为因素造成陀螺精度的降低。
3 导线平差各项参数的选择
1)地面GPS控制点相对的点位中误差,M近=±0.03 m。2)井上、下光电测距导线的测角误差mβ上=mβ下=mβ=±5″。3)立井井中测量误差M立=±0.1 m。4)井上下光电测距测边中误差m1上=m1下=m1=±0.005 m。5)陀螺定向误差取一次定向中误差mαT=±10″(所用仪器为:根据本工程实际测量数据计算所得)。6)ρ值取206 265,根据量角计算求得∑cos2α=31.222。
4 加陀螺边时贯通点K在水平重要方向X′轴上的误差预计
1)井上下导线测角误差引起K点在X′轴上的误差(见表1)。
(1)
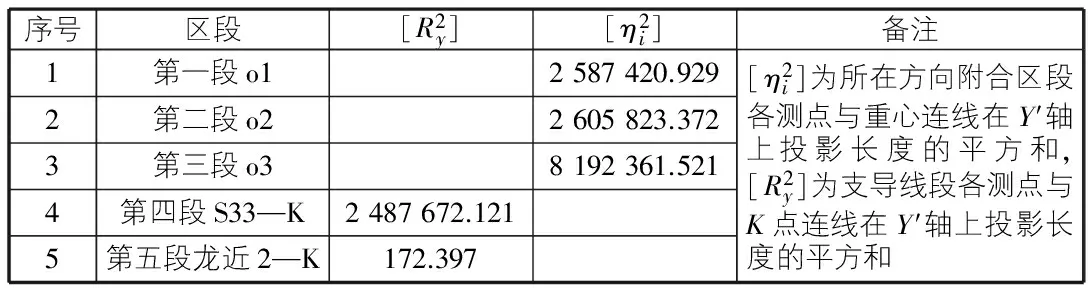
表1 井上下导线测角误差引起K点在X′方向上的数据表
将已知数据代入式(1)解得MXα=±0.096 m。
2)井上下导线量边误差引起K点在X′轴上的误差:
(2)
将已知数据代入式(2)解得MX1=±0.028 m。
3)陀螺定向误差引起K点在X′轴上的误差(见表2)。
(3)
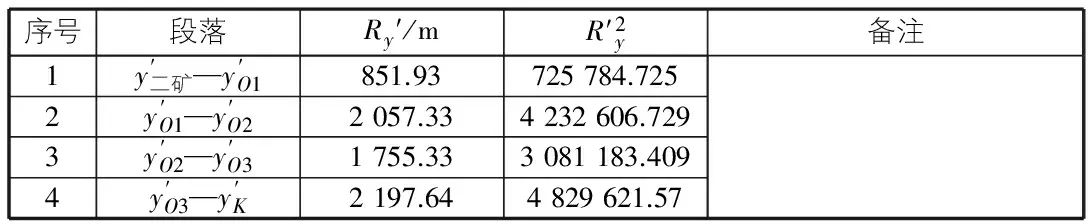
表2 陀螺定向误差引起的K点在X′方向上的数据表
将已知数据代入式(3)解得MXT=±0.174 m。
4)各种误差综合影响,预计K点贯通中误差MXK为:
(4)
将各项数据代入式(4)解得MXK=±0.215 m。
取两倍中误差为极限误差,则MXK预=±2MXK=±0.430 m,小于设计容许误差。
5 不加陀螺边时贯通点K在水平重要方向X′轴上的误差预计
1)由前面得知井上、下光电测距导线的测角误差mβ上=mβ下=mβ=±5″;则:井上下导线测角误差引起K点在X′轴上的误差MXα合并改化后其公式如下:
(5)

将已知数据代入式(5)解得MXα=±0.664 m,则独立测量两次MXα=±0.470 m。
2)井上下导线量边误差引起K点在X′轴上的误差由前面得知两次独立测量后MX1=±0.02 m。
3)各种误差综合影响,预计中误差MXK为:
(6)
将已知数据代入式(6)解得MXK=±0.482 m。
取两倍中误差为极限误差,则MXK预=±2MXK=±0.964 m,大于设计容许误差。
6 结语
通过以上分析我们可以得知,井下的观测条件有限,导线联测受外界因素干扰较地面更为严重,从而加大了误差存在的可能性,导致远离起算边的控制导线精度进一步降低。而通过分析比较在相同的观测方法和条件下合理加测陀螺定向边能够大大提高贯通精度,因此大型贯通测量中加测陀螺定向边显得尤为重要。
[1] 桑光灿.煤矿测量手册[M].北京:煤炭工业出版社,1990.
Significance analysis of gyro-orientation in large-scale pass-through measurement
JI Chun-ping
(YichengShangheCoalIndustryCo.,Ltd,YangquanCoalIndustryGroup,Linfen043500,China)
Combining with the pass-through practice of Yangmei group No.2 470 horizontal 15 coal-mining rail transit and mine No.2 Longmen well as an example, through selecting leading line error parameters, analyzes the impact of geo-orientation with measurement and without measurement upon pass-through accuracy, and points out that: rationally measuring gyro-orientation can greatly improve pass-through accuracy under same detection methods and conditions.
gyro-orientation, error estimate and precision, mean square error, gravity center
2014-07-18
吉春平(1983- ),男,助理工程师
1009-6825(2014)27-0213-02
TU198.6
A



