胡 亚 江
(深圳中铭勘测股份有限公司,广东 深圳 518172)
基于DLG的单近景影像建筑物三维测量技术
胡 亚 江
(深圳中铭勘测股份有限公司,广东 深圳 518172)
结合数字地图提供的位置信息,根据选取的建筑物特征点不同的类型,分别应用点点匹配和点线匹配两种测量计算算法,实现单近景影像的建筑物三维测量,试验结果证明,数字地图的单近景影像匹配的建筑物三维测量技术能精确测量出建筑物高度,其精度能够满足三维地理信息数据采集精度的要求。
数字地图,单近景影像,影像点坐标,建筑物三维测量
0 引言
在求解近景影像的摄影位置信息、摄影姿态信息、内方位元素信息、影像畸变参数的基础上,可以实现影像像素点的空间定位信息。这时,任何一个像素点与物镜中心的连线构成了一条空间摄影方向线,被测像素点的空间目标点就位于这条摄影方向线上,单张影像无法确定在摄影方向线的具体位置,因此不能唯一确定被摄物体的空间位置。
而在数字地图的支持下,摄影方向线指向了数字地图上的某个目标点或某个空间地物,利用数字地图提供的平面位置,就可以实现单张近景影像的三维测量。根据所求空间地物点的类型不同,基于DLG的单张近景影像的三维测量技术可以分为两类:一类是测量数字地图上地形特征点的三维坐标,另一类是测量数字地图上非地形特征点的三维坐标。
观测的像素点对应于数字地图的地形特征点时,该点的平面坐标是已知的,只要求出该点的高程即可;当观测的像素点不是地形特征点而是空间目标的某个细部点时,该点的空间位置不能直接从数字地图上得到。当观测点位于数字地图的某个直线目标上,那么可以在像素点和直线目标进行匹配,得到该像素点的对应点三维空间坐标。
1 数据预处理
以图1的示例来介绍基于DLG的影像解析数据预处理过程。
1.1 影像点测量与坐标转换
图像上在计算机中是以width行、height列中的二维矩阵来表示,每一个像素点在二维矩阵中的位置可以用直角坐标系统C0—uv中的(u,v)坐标来表示。
对图1中的1~9点进行影像测量,测量出各点的图像坐标系(u,v),并用转换关系式(1)将其转换为像平面坐标系(x,y),单位为像素,像素点的像空间坐标系(x,y,-f)。
(1)
当然,焦距f是未知的,可以给定一个初始值(以像素为单位,示例中假定近似值为3 000)。
1.2 地物点坐标获取
从数字地图上获取与影像像素点对应的空间地物点的二维平面坐标,这里应用C#.NET编程,利用ArcGIS ENGINE地图控件,自动实现数字地图上对应的空间地物点的平面坐标量测。
2 测量方法原理
2.1 点点匹配测量
所测的像素点对应于数字地图的地形特征点时,该点的平面坐标是已知的,这里采用点点匹配的测量方法,只要求出该点的高程即可。其计算过程如下:
1)获取像素点坐标(xp,yp)和相应的地形特征点平面坐标(X,Y),对像素点坐标进行影像畸变改正:
(2)
2)计算像素点在摄影测量坐标系中的坐标:
(3)
3)对地形特征点的坐标进行变换和平移:
(4)
平面坐标的旋转:
(5)
4)根据:
(6)
由三个方程计算地形特征点的高程,可以先计算点投影系数λ,然后计算高程:
(7)
2.2 点线匹配测量
当观测的像素点不是地形特征点而是空间目标的某个细部点时,该点的空间位置不能直接从数字地图上得到。如果观测点位于数字地图的某个直线目标上,那么可以采用像素点和直线目标进行匹配测量方法,得到该像素点的对应点三维空间坐标。具体实施过程如下:
2)根据影像的内外方位元素计算摄影中心在地图坐标系中的坐标:
(8)
3)由摄影中心和像素点构成了一条空间摄影射线。该摄影射线在空间辅助坐标系中的水平偏角和仰角为:
(9)
同时,摄影方向线的方位角为:
α测=α摄-u
(10)
4)利用数字地图上的直线端点的坐标计算其斜率:
(11)
5)那么,摄影方向线与该直线的水平交点坐标为:
(12)
6)根据摄影中心(X0,Y0)到被测点(XJ,YJ)的距离s,可以计算被测点高程为:
H=Z0+s×tan(v)
(13)
3 实例测量与精度分析
为了验证建筑物三维测量的效果,对建筑物的各特征点进行测量和分析。图2中对近景影像上的多个房角点和窗户角点进行分层分列选取,从高度方向分为9层、在水平方向分为19列,除了三个被遮挡点以外,对总共171个像素点进行了观测和计算。
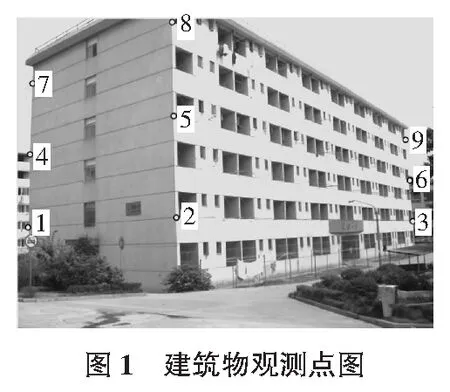

利用以上点线匹配的测量技术,对这171个点进行了三维坐标计算,表1中列出了各点的高程结果,并进行了统计分析。
从表1的计算结果中可以看出:检测点的外精度高于内精度,符合测量数据处理的规律。在没有考虑到数字地图自身精度
的情况下,计算结果统计精度达到了厘米级,远高于数字地图本身的分米级精度要求,所测建筑物高度的精度满足三维地理数据的精度要求。
表1 三维测量的高程结果及精度计算
4 结语
基于数字地图的单近景影像三维测量技术在近景影像解析的基础上,根据地物点的不同类型,分别采用点点匹配和点线匹配两种测量计算算法,实现对近景影像上的地理目标进行三维测量。试验结果证明:通过数字地图的单近景影像匹配的建筑物三维测量技术能精确测量出建筑物高度,其精度能够满足三维城市地理信息数据采集精度的要求。
[1] 冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002.
[2] 康志忠.数字城市中街道景观主体三维可视化的快速实现研究[D].武汉:武汉大学博士学位论文,2004.
[3] 刘亚文.利用数码像机进行房产测量与建筑物的精细三维重建[D].武汉:武汉大学博士学位论文,2005.
[4] 张祖勋,吴 军,张剑清.建筑场景三维重建中影像方位元素的获取方法[J].武汉大学学报(信息科学版),2003,28(3):265-271.
[5] 张祖勋,张剑清,张世兴.单像房屋三维重建[A].海峡两岸自动化数字工程测量研讨会[C].台南,2001.
Architectural three-dimensional measurement technology of single close-range image on the basis of DLG
Hu Yajiang
(ShenzhenZhongmingSurvey&MeasurementCo.,Ltd,Shenzhen518172,China)
Combining with location information supplied by digital map, according to different selected architectural characteristics, the paper respectively applies two kinds of measurement and computation methods of point-point matching and point-line matching, and realizes architectural three-dimensional measurement of single close-range image. The experimental results show that: architectural three-dimensional measurement technology matching single close-range image of digital map can accurately measure building height. Furthermore, the accuracy can meet three-dimensional geographic information data collecting accuracy demands.
digital map, single close-range image, image-point coordinate, architectural three-dimensional measurement
1009-6825(2016)16-0218-02
2016-03-20
胡亚江(1980- ),男,硕士,工程师
TU198
A



