谢 锋 珠
(山西煤炭职业技术学院,山西 太原 030031)
基于PHOTOMOD软件制作无人机航测正射影像图
谢 锋 珠
(山西煤炭职业技术学院,山西 太原 030031)
基于PHOTOMOD软件在数据处理过程中的优异特点,探讨了无人机航拍高质量、高精度DOM的制作流程,并从相机畸变参数、点云滤波、DEM优化方法、影像拼接等方面,论述了DOM制作中的关键技术,指出PHOTOMOD软件为航测数据处理提供了新途径。
无人机航摄,正射影像,PHOTOMOD,DEM
得益于无人机性能的快速提升,无人机低空航摄技术以其响应速度快、成本低廉、能满足大比例尺成图要求等特点在应急测绘、城镇规划、承包经营权发证等工作中得到了广泛应用。但无人机航摄相对传统航摄也存在飞行姿态变化快,影像倾角大,像幅数较多等特点,这给航摄数据处理平台提出了新的要求[1]。综合以上特点,无人机低空航摄系统在DOM生产中的主要问题如下[2,3]:
1)无人机航摄一般采用非量测相机,此类相机镜头畸变较大,且受飞行及降落条件影响镜头畸变不稳定,即使自动空三匹配的质量较好,也会由于上下视差的存在降低DSM点云精度及DEM精度,进而影响DOM精度及质量。2)传统的方法利用立体像对匹配DSM点云,人工处理地表植被、构筑物等特征地物生成DEM,设计有效的滤波手段避免人工干预,可以极大的提高工作效率。3)受中心投影的影响,且航高较低,较高的构筑物在不同航片上的倾向差异较大,且不同航片上色彩各不相同,拼接线的走向应避开较高的构筑物,同时需要利用软件的匀光匀色功能合理的调整航片的色彩。
通常情况下,数字正射影像图的数学精度通过优化飞行方案,空三加密处理,容易满足要求,但影像质量受到色调、色彩、拼接线两侧色差的影响较大,只有优化正射影像的生产过程,才能解决以上矛盾。
1 数字正射影像图的制作流程
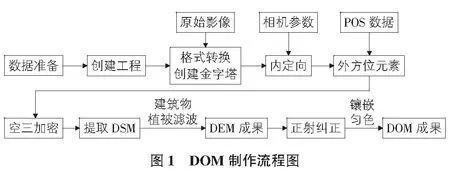
利用数字高程模型制作数字正射影像图的过程其实质是利用微分纠正方法依据纠正单元的地面实际高程计算该单元的纠正元素,实现航摄像片由中心投影转变为正射投影的过程。正射影像图的制作流程如图1所示。
2 DOM制作关键技术
2.1 相机畸变参数
在摄影测量中,最重要的设备是相机。传统摄影测量都要求采用量测型相机,对于专业量测相机,各项指标都要求十分严格,尤其是对于相机镜头其误差、分解力、畸变都有相应的规定和要求,且要具备定向和置平装置。这也就导致了其价格昂贵,且体积笨重。
对于无人机摄影测量,由于其体积小,载重轻,通常选择较高端的数字相机,在对其进行严密的畸变参数纠正后,结合自动拍照装置,装载在无人机上面,进行航摄。与专业量测相机相比,数字相机的缺点是内方位元素不稳定,无压平、水准和定向装置,畸变差较大等,需要对其执行严格的相机参数标定。由于无人机起飞、降落以及运输过程中,都会对相机畸变参数产生一定的影响,理论上应在每次起飞前都要进行相机参数的检校、标定,但在实际生产中不太现实。因此,需要软件可根据联合平差结果进行相机的自检校。
在自动空三加密后,如果已经匹配到了足够的连接点,且连接点残差均方根和最大值都小于规范要求,但是在立体视图下,仍存在视差,通常是由于相机畸变参数不准导致的,可利用软件进行相机参数的自检校。
PHOTOMOD软件支持联合平差,既可以支持无控制点工程的相机自检校,也支持布控工程的相机自检校。针对无人机的自动空三,PHOTOMOD软件利用的特定算法,在连接点匹配完成后,可自动剔除错误以及超限的连接点,使得连接点数量少、精度高。PHOTOMOD软件采用光束法平差,将外方位元素和匹配连接点置于同一共线方程式中,对由像平面坐标观测值构成的非线性函数线性化,利用最小二乘原理,经过多次迭代计算后确定最优值。在自检校时,软件将该项目的系统误差计算到相机参数中,从而可以得到针对该项目最优化的相机检校值。
经过相机自检校,可以有效消除立体像对间的上下视差,提高作为正射纠正基础的点云的精度,一定程度上消除了由于点云质量较差导致的正射影像数学精度低、影像拉花、变形等影响。
2.2 点云滤波
无人机航摄的特点是像幅小影像数量巨大,手工编辑地面点的方法工作量较大,采用滤波的方式对DSM进行优化是较为适合无人机航摄的方法。
1)PHOTOMOD软件基于LiDAR点云处理原理,采用基于坡度变化的滤波算法,根据地形坡度变化确定最优化滤波函数,对于给定的高差值,随着两点间距离的减小,高程值大的点属于地面点的可能性就越小。2)PHOTOMOD软件以建筑物的底座基准高度为准,删除边界内部的点,将底座边界重新生成TIN加入到地形TIN中。3)PHOTOMOD软件采用模型化的滤波方式,提供了Z值范围、Z中值、表面目标、影像纹理、建筑物和植被滤波等多种方式,通过滤波方法极大的提高了DEM精度,减轻了工作量,能够满足DOM生产的要求。
2.3 DEM优化的其他方法
数字高程模型(DEM)的分辨率一般低于正射影像(DOM)的分辨率,所以需要在特定区域增加特征线,以提高DOM精度。通过采集特征线的方法可以提高正射影像图的精度,但是采集大量的特征线费时费力,常用的方式是采用数字高程模型(DEM)为主,在道路、桥梁以及重要线状地物上测量特征线参与构TIN的方法。
特征线采集与DEM获取的注意事项:1)大型线状人工构筑物的特征线采集。对一些线状人工构筑物例如道路、桥梁采集必要的特征线,解决道路、桥梁等重要地物的影像变形问题。2)分层采集立交桥特征数据,两次纠正,合成使用。在立交桥处,必须同时保证立交桥与道路的影像正确,采用两次纠正,合成使用的方法可以很好的解决这个问题。第一次纠正只采集立交桥的特征线数据,保证立交桥的精度,第二次纠正只采集道路的特征线数据,保证道路的精度,两次分别生成DEM,分别纠正影像,后期利用PhotoShop软件合成正射影像。3)森林覆盖区DEM优化。由于DEM一般紧贴地面生成,会导致森林覆盖区影像出现模糊、拉花等现象,所以在此类区域适当拔高DEM,使其覆盖于树冠顶部,可以极大的提高影像清晰度。4)地形变化剧烈处的DEM优化。在地形变化剧烈的山脊、山谷处,通过降低山脊线,抬高山谷线的方法优化DEM,可以有效的提高影像的数学精度,减少地形变化带来的影像变形。
在一些区域,通过DEM优化无法达到理想的效果时,还可以采用较低分辨率的DEM纠正正射影像,也能在一定程度上提高影像清晰度。
2.4 影像拼接
由于相机采取中心投影,造成房屋在不同航片上的倒向不同,在进行影像拼接的时候,拼接线需要避开房屋、高架桥等设施,因此拼接线的质量尤为关键。不同影像在接边处颜色也会有所不同,软件的匀光匀色的性能对于最终成图质量影像至关重大。
2.4.1 匀色
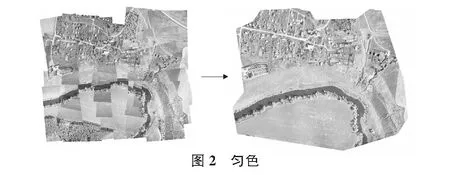
PHOTOMOD软件提供多种匀色方案:1)基于原始影像,局部调整。该方式最大程度上保持影像原始色彩,通过设置片区大小和色彩反差系数,对拼接线两侧影像进行色彩调整、并晕开亮度。2)基于影像平均亮度调整。使用影像平均亮度对整体影像进行匀光、匀色,并结合局部调整。3)基于模板匀色。选取一幅包含尽可能多的物的影像,调整色阶曲线、对比度、亮度以及RGB色彩深度等,使之颜色最佳,之后使用该模板对影像进行匀色,也可以直接使用颜色较好的工程内影像对整体影像匀色。匀色效果图见图2。
2.4.2 拼接线
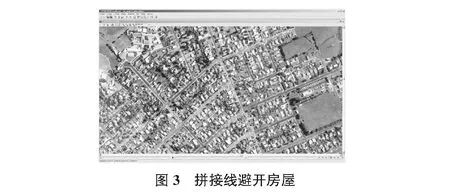
PHOTOMOD对海量数据自动生成拼接线,且绝大部分拼接线会自动避开房屋,极大的减少人工拼接的工作量。在拼接线编辑完成后,可即时预览效果,如图3所示。
2.4.3 影像裁切
针对无人机影像,影像边缘裁切可有效去除畸变较大的影像边缘区域。切除影像边缘只利用最下方的影像进行拼接出图,可有效减小投影差对数据质量的影像,也更接近真正色,成图更美观。
2.4.4 拼接线自动加密
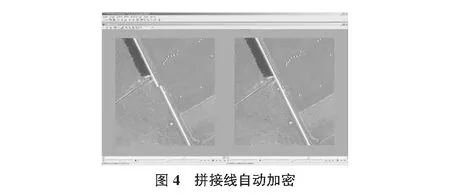
由于DEM分辨率一般低于DOM分辨率,DEM就会导致拼接线在具备一定高度的路基、沟渠等处拼接会有少许错位。PHOTOMOD软件支持在生成拼接线后,在拼接线周围搜索同名点,构成连接点,以提高拼接精度。 拼接线自动加密见图4。
3 结语
数字高程模型(DEM)的获取、影像拼接、色彩调整是正射影像制作过程中的重要步骤,本文利用PHOTOMOD软件,结合其数据处理过程中的优异特点,探讨了无人机航拍高质量、高精度DOM 的制作流程,并重点论述了DOM 制作中的关键技术。PHOTOMOD软件为航测数据处理又提供了一套完整的整体解决方案。
[1] Habib Aziz Salim,陈晓玲,江万寿,等.基于Photomod3.11制作数字正射影像[J].测绘信息与工程,2007,32(5):27-29.
[2] 何 敬,李永树,鲁 恒,等.无人机影像的质量评定及几何处理研究[J].测绘通报,2010(4):22-24.
[3] 买小争,杨 波,冯晓敏.无人机航摄像控点布设方法探讨[J].测绘通报,2012(3):275-278.
On othoimage of unmanned aerial vehicle’s air survey based on PHOTOMOD software manufacturing
Xie Fengzhu
(ShanxiCoalVocationalPolytechnicCollege,Taiyuan030031,China)
Based on PHOTOMOD software, the paper indicates the advantages of the data processing, explores the manufacturing procedure for the unmanned aerial vehicle’s high-fidelity and high-accuracy images, indicates the key techniques for the DOM manufacturing from camera distortion parameter, point cloud filter, DEM optimal method, and image fusion, indicates the key technique in DOM manufacturing, and points out PHOTOMOD provides new channel for the navigation data process.
unmanned aerial vehicle, othoimage, PHOTOMOD, DEM
1009-6825(2016)31-0208-02
2016-08-25
谢锋珠(1972- ),男,讲师
TU198
A



