翟 思 慧
(北京市西城外国语学校,北京 100037)
变形监测就是利用测量方法与专用仪器设备对关注对象的变形状况进行监视和观测,其主要工作内容就是对监测体的形态、位移、倾斜、挠度、裂缝、振动和相关影响因素进行测量,并开展变形分析与变形预报。变形监测在预防重大自然灾害、检验工程施工质量、验证设计参数、评估大型建筑的使用寿命等方面有着重要的技术支撑作用,已经成为重大工程、地质灾害频发区域强制实施的一项工作[1]。本文在分析现有测量手段的基础上,提出了建立基于区域定位系统的变形监测方法。
1 变形监测技术需求
变形监测的主要任务是周期性地对观测点进行重复测量,以求得其在观测周期内的变化量。变形监测的工作实质是测量在一定范围内被监测体的相对位置变化,准确掌握变形体的变形特征和变形过程,如果测量结果超出一定的限值,则可能发生重大事故,就需要提前采取补救或者预防措施,通常大型建筑工程和易发生自然灾害地形的变化量要求测量精度应小于允许变形值的1/10~1/20,要达到毫米量级[2],主要是研究不同部位相对位置变化,而对于绝对定位或者整体变化情况反而没有过高要求。
由此可以知道,变形监测核心工作是监测部位的定位测量,由于关注的重点是相对位置变化,因此只需建立区域独立坐标系统,没必要联测到大地测量坐标基准[1]。
2 现有手段的局限性
随着现代科学技术的发展,变形监测的技术手段,经过长期的技术探索和经验积累,逐渐形成多层次、多视角、多手段、自动化的立体监测体系。
以经纬仪、测距仪和水准仪为代表的进行三角测量、导线测量和水准测量等传统作业手段的测量方法,技术与理论成熟,测量数据可靠,观测费用相对较低,但是所需的观测时间长、劳动强度大、对作业人员要求高,观测精度受仪器设备测量精度、具体作业方法、观测网布设、天气等条件影响较多,不能自动化观测,需事后进行数据处理计算,在快速、实时、高精度等要求场合受到一定限制。
以RTS(自动全站仪、测量机器人)为代表的现代测量技术,逐步取代以经纬仪、全站仪为代表的常规测量技术,成为较为流行的地面监测技术手段。但只是相对常规传统测量手段提高了观测与数据记录的自动化程度,其他方面并没有实质性的变化。
以测斜仪、分层沉降仪、光纤传感器等为代表的专门观测监测技术,已实现数字化、自动化,但是所需保障条件相对较多,单一手段还不能解决变形监测问题,只是对其他手段的补充与完善。
以GPS(全球定位系统)、差分干涉合成孔径雷达(D-InSAR)技术、摄影测量技术和机载激光雷达技术为代表空间对地形观测技术,已经得到发展和应用,已实现了高精度和一定程度上的自动化,但测量精度受地形影响大,在山区和建筑物内部使用还受到很大限制[3,4]。
综合以上一些常用的测量手段,要么作业效率低,监测周期长,要么人力投入大,施工作业复杂,要么受地形影响,达不到预期的精度指标,这些因素使得变形监测成为作业复杂的测量工种。
随着北斗、GPS和GOLNASS为主体卫星导航定位系统不断完善和推广应用,人们对无线电定位技术进行了多方面的研究,为实现无线电测量高精度测量奠定了深厚基础,为变形监测新方法手段提供了技术可能。
3 建立区域定位系统用于变形监测的可行性
3.1 基本原理
根据监测体地形或空间情况,按一定几何关系布设一定数量(至少四个)的信号发送基站,在待测量部位设置相应的信号接收装置(简称接收机),相应位置关系如图1所示。
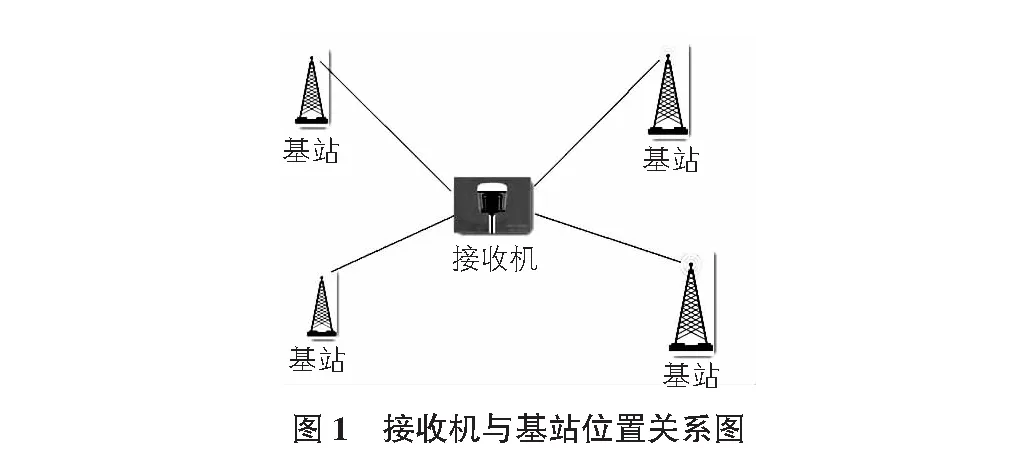
当接收机同时接收四个以上基站发出的信息,根据信息由基站到接收机的传输时间,分别计算出接收机至基站的距离:
ρ=c·Δt。
其中,Δt为传播时间;c为光速。
由于基站的位置坐标是事先精确测定的,则可以由基站与接收机构成方程:
ρi=c·Δti=[(x-xi)2+(y-yi)2+(z-zi)2]1/2+c·ΔT。
上述的方程中待测点的坐标x,y,z和接收机与基站时钟之间的时差ΔT为四个未知数,其中ρi分别为基站1,2,3,4到接收机之间的距离;xi,yi,zi分别为各基站的坐标。显而易见,只要构成四个方程,就可以得到接收机的三维位置x,y,z和接收机与基站之间的钟差ΔT。
由于监测区域范围相对卫星导航定位系统而言要小得多,电波信号传输距离相对星地距离也缩短很多,各种电波传播的干扰因素少,各基站至接收机的传播条件一致性较好,如果解决了时间同步问题,则在上述方程中就减少了一个未知数ΔT,那么1台接收机只要同时接收来自3个基站的信息即可获得相应精度的定位结果。
由此可知,如果在各监测部位布设一定数量的接收机,保证每台接收机能够至少接收到来自3个基站的信息,就可以得到各个接收机的精确位置,通过一定时期内持续测量,就可得到各监测部位相对位置变化情况,依此完成相应的监测任务。
3.2 需重点解决的技术问题
1)时间同步。
时间同步是无线电定位需要解决的重点问题,随着技术进步,如今已有多种成熟技术可用,如采取光缆通信网络统一授时的办法,国内已经达到骨干网传输250 km,闭环运行24小时秒信号同步不确定度已经达到0.1 ns和0.002 8 ns的时间稳定度[5],如果距离近,精度还可能进一步提高;采用双向授时的方法,可使系统内部时间同步精度,达到5 ns以内。如果地形条件允许,也可以采用区域内设备接收同一颗导航卫星(北斗、GPS和GOLNASS等)的时间信息,卫星共视法,时间精度仪距法可以达到3 ns~5 ns,载波相位共视可达到亚纳秒量级,实现区域内时间同步[6]。由于只关注观测部位相对位置变化,因此只要满足区域内时间同步,可不依托国家时间系统,只需自主建立区域时间系统,因而就不需要在系统设备中使用高精度的昂贵时频设备,采用以上三种方法,都可以达到理想的精度。
2)传输信号、发射功率与工作频率设置。
基站发送的信号主要包含本基站标识与坐标信息、时间信息,如果将基站坐标信息内置于接收机,则基站发送的信息将会更加简化。由于是小区域内工作,基站的发射功率就可以降低至满足需要的程度,在不影响区域内其他用频用户工作的情况下,工作频率的选取会更加宽泛,无线电定位精度与波长有直接关系,为获得更高测量精度,可以选取尽量高的工作频率。
3)基站布站规则。
主要是按照基站和接收机构成空间几何图形的图形强度来衡量,就是空间几何图形的“几何分布均匀性”,行业上通常用“PDOP”表示,PDOP值越小,定位精度就越高。通过科学设计基站位置,使基站和监测点在空间上的几何分布尽量均匀,可以构成最优的几何图形结构,以达到理想的定位解算精度。
4 建立区域监测系统优势
1)地理环境适应性强。该方法根据监测对象灵活布站,不依托卫星导航信号,能很好地解决卫星信号遮挡或者信号接收条件不好的地形影响。
2)简单易行。该方法测量精度高,可以达到毫米量级,数据处理与卫星导航定位系统通用方法相近,无需重大技术攻关。
3)技术成熟。该方法所涉及的基站设备与接收机技术成熟,国内同类产品较多,无技术风险,数据处理软件与导航定位软件相似,无技术门槛。
4)自动化程度高。可以建成无人值守状态,可进行常年监测,监测结果信息可由某一基站,通过北斗信息或电信、有线网络发送至管理终端,实现不间断监测。
[1] 岳建平.变形监测技术与应用[M].北京:国防工业出版社,2016:1-5.
[2] 邱冬炜.变形监测技术与工程应用[M].武汉:武汉大学出版社,2016:5-7.
[3] 卫建东.现代变形监测技术的发展与展望[J].测绘科学,2007(6):10-13.
[4] 陈敦云.变形监测应用技术[J].福建地质,2006(4):18-20.
[5] 陈发喜.光纤时间传递工程应用研究[A].第八届中国卫星导航学术年会[C].2017.
[6] 郭美军.一种基于伪距辅助载波相位共视时间传递方法[A].第八届中国卫星导航学术年会[C].2017.



