钱美刚
(上海市基础工程集团有限公司,上海 200433)
0 引言
如何控制隧道轴线偏差达到高精度的要求,应从和测量相关的各个方面去全面的考虑,从每个环节上给予测量误差的最大削弱。本文将以上海硬X射线自由电子激光装置工程为背景,详细阐述通过相关测量技术手段对盾构施工过程中的每个环节加以控制,使成型隧道轴线偏差达到有效控制,并满足轴线偏差高精度的设计要求。
1 工程概况及难点
1.1 工程概况
硬X射线自由电子激光装置项目位于上海市浦东新区张江园区内,项目主要由长约3.2 km的地下隧道、5个竖井及竖井附近的地面设施组成。地下隧道分为加速器段、波荡器段、光束线段和超长光束线段。
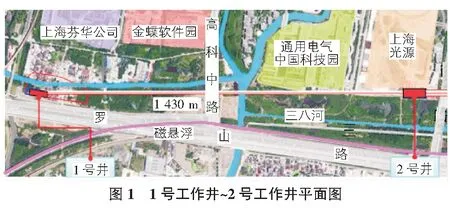
其中1号工作井~2号工作井区间隧道为加速器段,区间隧道采用1台直径7.2 m盾构机进行施工。本区间隧道长度1 430 m,为所有区间隧道长度最长、测量控制难度最大的区间,如图1所示。本文将以此区间为例,详细阐述高精度控制隧道轴线偏差从方案设计到实践取得的成果的全过程。
1.2 轴线偏差控制要求
本工程建造的地下隧道其使用功能为科学试验用,非常规地铁隧道,因而对成型隧道的准直度要求很高,设计成型隧道轴线偏差如下:隧道横向偏差不大于±25 mm;隧道竖向偏差不大于±25 mm。
1.3 测量控制难点
1)井位埋深较深,1号始发工作井及2号接收工作井埋深近40 m,井上井下定向测量难度较大,且1号始发工作井井下定向基线边长短。
2)区间隧道长度相对较长,地下控制测量难度较大。
3)区间隧道施工过程中,成型管片脱出盾尾过程中及脱出盾尾后的横向位移量、竖向位移量及竖向纵径变形量的大小直接对最终成型管片轴线偏差产生直接影响。
2 测量方案设计与实践
2.1 定向测量
2.1.1 定向测量方案设计
定向测量在施工控制测量中,占有十分重要的地位,其精度对隧道轴线偏差及最终的贯通精度起着最为直接的影响。定向测量一般可采用一井定向、两井定向、导线直传测量、陀螺全站仪和铅锤仪组合定向等方法进行[1]。充分结合本区间隧道工程现场施工条件及现有测绘装备,采用两井定向方式进行定向测量。

Mβ=±(3.27×1 430 000/206 265)=±22.7 mm
(1)
通过上述估算,在不考虑其他测量误差的前提下,也较难以达到轴线偏差不大于±25 mm的要求。故对两井定向方案进行优化,采用双两井定向方案进行定向测量,并将定向测量次数由6次增加到8次。
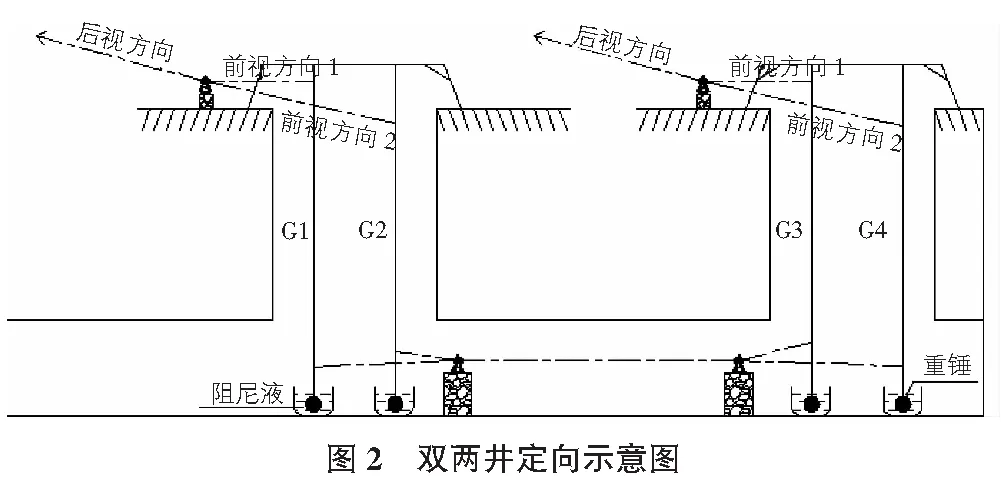
两井定向是通过两个竖井内各悬挂一根钢丝,通过测量钢丝与地下定向点的相对位置关系,通过无定向导线方式处理数据,获取地下定向点的坐标及方位。双两井定向是在原两井定向的基础上,在两个竖井内各增加一根钢丝,使单次地下定向点成果由1组变为4组,4组地下定向点成果在方位角相互较差不大于8″的前提下取均值作为单次定向测量成果,如图2所示。

Mβ=±(1.41×1 430 000/206 265)=±9.8 mm
(2)
由上可见,采用双两井定向测量引起的横向误差较小,如按上述方案严格执行且在其他测量环节中对测量误差加以控制,能够满足轴线偏差不大于±25 mm的要求。
2.1.2 定向测量实施及应用成果
定向测量井上井下采用2台LEICA TS60型全站仪同步进行观测,采用全圆观测法四测回测角、四测回测距的方式进行。观测结束后,现场进行外业数据的预处理,确保外业观测数据满足相关规范要求。井下定向点数据处理按无定向导线方式进行。
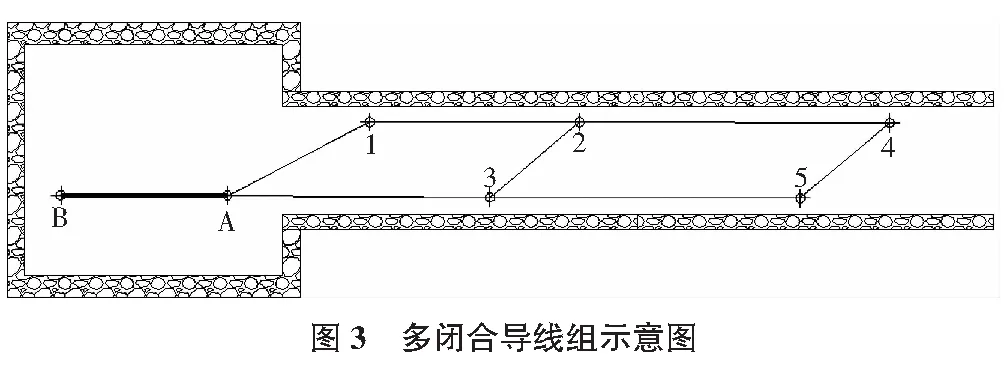
本项目1号工作井~2号工作井区间隧道实施过程中,按设计方案共进行了8次定向测量,成果数据较多,故本文以第8次测量成果加以展示(见表1)。
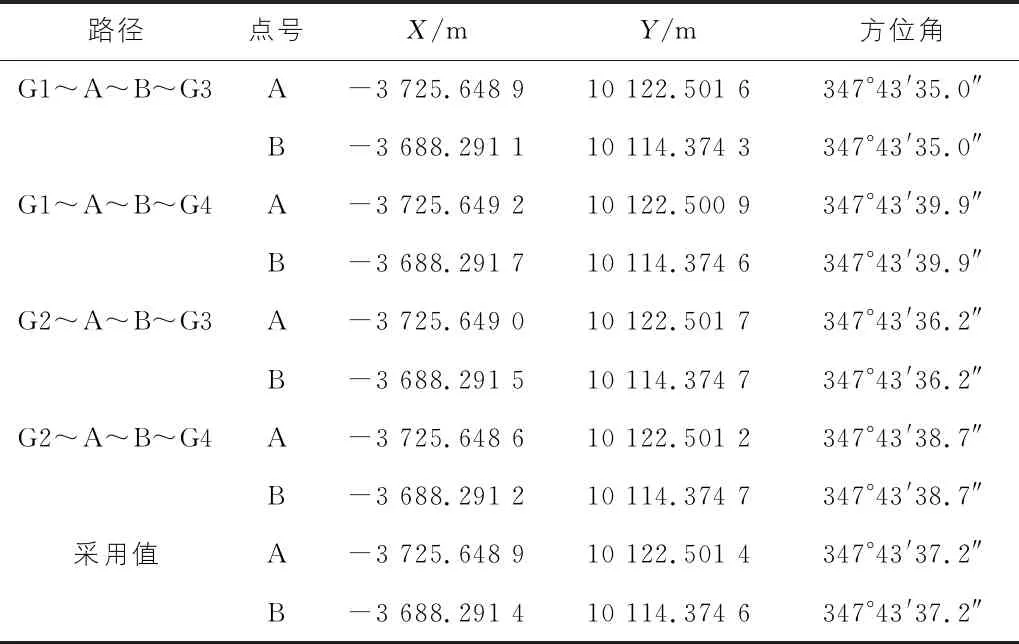
表1 定向测量成果
从表1可知,第8次定向测量成果良好,各组测量成果点位坐标及方位角相差均较小,满足要求。
2.2 地下控制测量
2.2.1 地下控制测量方案设计
地下控制测量是以定向测量成果为起算数据,将坐标及方位、高程引测至隧道内。作为成型隧道轴线检测及隧道施工的依据,其难点是在于如何有效控制误差的累计,所以必须逐一减弱每一延伸站的测量误差,确保每一个点位的精度使最前端点位满足精度要求。地下控制测量一般可采用支导线、双导线方式进行。支导线一般适用于距离较短的隧道,可采用多次观测的方式达到提高支导线精度的目的;双导线一般适用于较长的隧道,其导线分别布设隧道两侧,测量时从一侧进,另一侧出,网形上形成闭合导线形式,由于双导线有了检核条件,因而其精度优于支导线。但在双导线中,隧道贯通前其最弱点始终位于隧道最前端。因本项目对轴线偏差要求很高,而处于隧道最前端最弱点的精度将对盾构机实时姿态产生最直接的影响。为有效提高地下控制测量的精度本项目实施过程中采用了多闭合导线组方案进行地下控制测量。
多闭合导线组是在隧道内布设多个闭合图形(见图3),每个闭合图形由4个点位构成,闭合图形与闭合图形之间采用2个公共点及1条公共边进行连接,2个公共点中其中1个点为相邻闭合图形的起算点,另1个公共点和公共边构成两组相邻图形间的检核条件。公共点采用坐标分量较差检核,公共边采用方位角较差检核。
随着隧道不断的延伸,多闭合导线组在地下控制测量中,是将测量误差在每一延伸站中消弱,减少误差累计,从而达到提高地下控制测量精度的目的。
2.2.2 地下控制测量实施与应用成果
多闭合导线组每组导线测量时采用1台LEICA TS60型全站仪按闭合导线形式施测,采用方向观测法,四测回进行左、右角观测,左、右角之和与360°之差不大于±4″,边长往返观测各两测回。每组图形观测结束后,现场进行外业数据预处理,确保外业观测数据满足相关规范要求。内业数据处理采用闭合导线按严密平差方式进行。地下控制测量流程图见图4。

当相邻闭合图形均完成内业数据处理后,应同步对相邻闭合图形间的公共点坐标分量较差Δd,公共边方位角较差fβ进行计算,确保相邻图形间的精度,如式(3),式(4)所示。
(3)
fβ=β′-β
(4)
本项目1号工作井~2号工作井区间隧道实施过程中,隧道内共布设了6组闭合图形,并进行了多次观测,成果数据稳定。在每组闭合图形均满足相关规范要求的同时,相邻闭合图形间的公共点坐标分量较差Δd,公共边方位角较差fβ均较小。公共点与公共边较差见图5。

如图5所示,相邻闭合图形间的公共点及公共边,在不同组闭合图形中通过数据处理后,其公共点坐标分量较差Δd及公共边方位角较差fβ均较小,有效的削弱了误差的累计,从而达到提供地下控制测量精度的目的。
2.3 盾构掘进时成型管片监测
盾构掘进时,其盾尾内部管片处于非完全稳定状态,其受掘进时所处线性、盾构机顶力、外侧土压力及所处土层等多个因素影响。要确保成型隧道轴线达到理想状态,在成型管片未达到稳定前必须对其加以监测,通过监测数据及时调整盾构掘进参数,从而达到最终隧道轴线满足高精度设计要求的目的。
2.3.1 监测方案设计
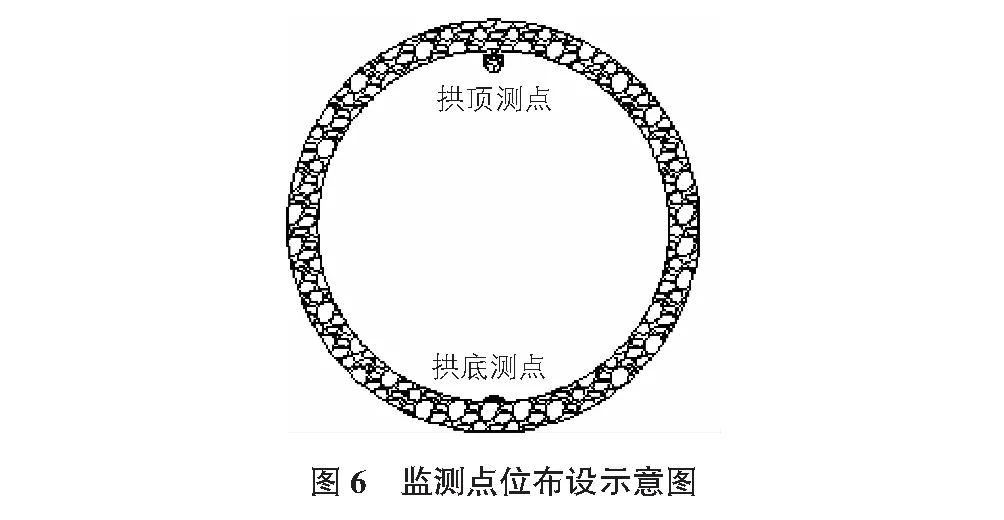
根据以往施工经验,成型管片在脱出盾尾时及脱出盾尾后方一段距离后即可达到稳定状态,因而施工过程中此段为监测重点区域。监测项目包括成型管片拱底、拱顶竖向位移监测、纵向收敛变形监测、成型管片横向位移监测。
监测方案拟定应充分结合作业现场条件,使方案具备可实施性。本工程实施过程中监测方法及点位布设拟定如下:拱底竖向位移监测采用水准方式进行,点位布设与管底中心部位,点位为圆头道钉;拱顶竖向位移监测、纵向收敛变形监测、成型管片横向位移监测三个测项整合为一,采用极坐标法结合三角高程方式进行,点位布设于拱顶中心位置,点位采用定制“T”型螺丝,“T”型螺丝安装于管片预埋凹槽内,螺丝下端安装反射棱镜。点位埋设时应注意使拱顶拱底点位尽可能的处于同一断面内,以提高成果精度,如图6所示。
监测频率应根据盾构掘进计划及实时工况进行拟定和调整,本工程实施过程中拟定监测频率为1环/次,并根据监测成果实时进行合理调整,直至成型管片达到稳定状态后停测,停测要求目标值如表2所示。

表2 停测要求目标值
2.3.2 监测实施与应用成果
本项目1号工作井~2号工作井区间隧道实施过程中,上述监测项目全程进行跟进。
拱底竖向位移监测采用索佳SDL1X型数字水准仪按二等水准要求进行观测,以传递至隧道内稳定的水准点位作为起算点位,完成观测后进行数据处理并及时提交成果。
拱顶竖向位移监测、纵向收敛变形监测、成型管片横向位移监测采用LEICA TS15型全站仪按极坐标法加三角高程形式同步完成数据的采集,测量时采用盘左、盘右进行观测,获取拱顶监测点位的三维坐标。其获取的平面坐标用于管片横向位移成果的计算;高程用于拱顶竖向位移成果的计算;拱顶高程值与拱底高程值共同用于纵向收敛变形成果的计算。拱顶高程参与纵向收敛变形成果计算时,应考虑反射棱镜中心至拱底管片弧面的高度常数。
盾构掘进中某环监测成果见图7。
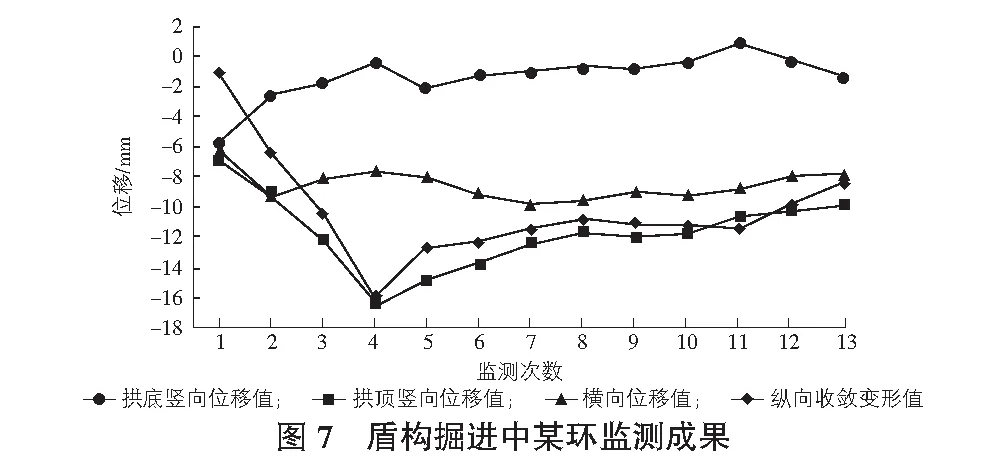
由图7可知,此环在成型管片脱出盾尾及脱出盾尾后方一定区域范围内,其拱底竖向位移量较小,但拱顶竖向位移量、横向位移量及纵向收敛变形量变化明显。这些变形量将对成型隧道的轴线产生最为直接的影响。
盾构掘进中,通过对成型管片脱出盾尾及脱出盾尾后方一定区域范围进行监测,通过监测成果,调整施工参数及时对其进行干涉,是保证成型隧道轴线达到高精度要求的重要技术措施之一。
2.4 高程控制测量
高程控制测量主要包括:地面高程测量、高程传递测量、地下高程控制测量。随着测绘装备精度不断的提升,按相关规范要求执行即可较容易达到相关精度的要求,故本文不做重点阐述。
在本项目实施过程中,上述测量内容均采用传统水准测量方式获取待测点高程。在高程传递测量中,为检验传递至地下高程点位的稳定性及可靠性,还采用了双仪器不量仪高同步三角高程法进行了高程传递测量,如图8,表3所示。
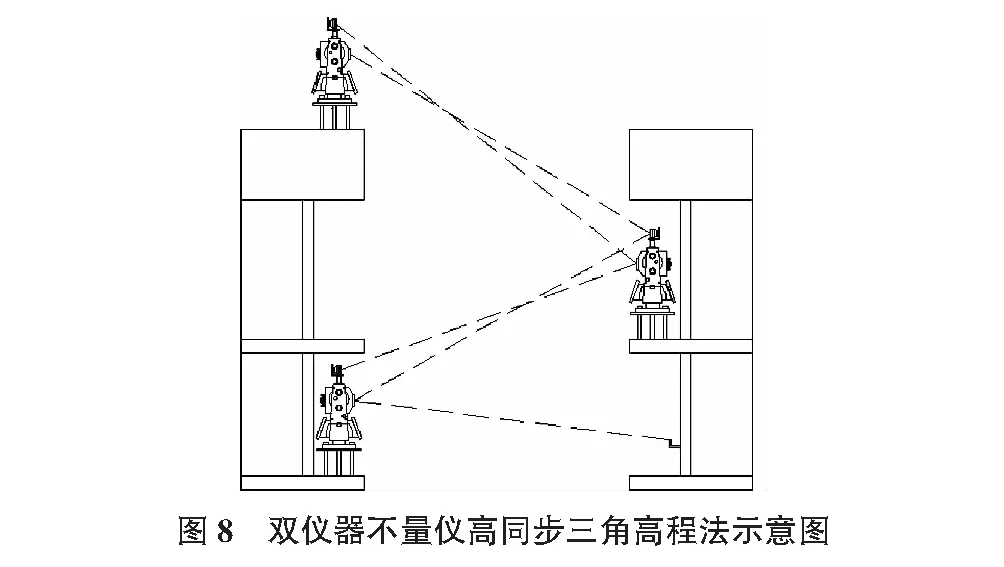

表3 高程传递测量不同方法成果比对表
3 贯通测量成果及隧道轴线偏差情况
3.1 贯通测量成果
隧道贯通后,应及时进行贯通测量,本项目1号工作井~2号工作井区间隧道顺利贯通后,通过2号工作井采用双两井定向法进行定向测量,并进行2次独立定向测量,平差成果用于贯通测量。在隧道贯通面附近布设一点,分别从1号工作井、2号工作井内的定向测量点位分别测量该点的三维坐标,并将其归算至设计轴线上,获取隧道贯通后的横向贯通测量误差、高程贯通误差及方位贯通误差。贯通测量成果见表4。

表4 贯通测量成果
如表4所示,贯通测量成果良好,其中横向贯通误差和高程贯通误差能够满足轴线偏差高精度的要求。
3.2 隧道轴线偏差情况
隧道贯通后,利用隧道两端定向测量点位作为起算数据,在隧道内布设一条地下附合导线。数据经严密平差后,隧道内加密点位用于隧道轴线偏差测量的起算数据。本项目1号工作井~2号工作井区间隧道轴线平面偏差、高程偏差、成型隧道准直度均能够满足设计高精度要求,因成果数据量较大,故本文不做详细展示。
4 结语
在上海硬X射线自由电子激光装置项目实施过程中,从可能引起轴线偏差不达标的各个影响因素着手,针对各个测量环节进行针对性的测量方案设计,实施过程中把控各个测量环节,使各个测量环节间有效衔接,从而保证了隧道轴线偏差满足高精度的要求,同时也为今后类似工程的实施提供了宝贵的经验。



