徐卫东,伍锡锈,欧海平
(广州市城市规划勘测设计研究院,广东 广州 510060)
在边坡、桥梁、大坝等结构物变形监测应用中,监测点的变形特征与其监测对象本身特点或外在荷载因素具有很大的关联性,以及由此而产生的诸多先验信息在实际变形监测应用中并没有得到很好的利用。如高层建筑在风力荷载下的振动变形方向主要表现在顺风向且在垂直方向上位移变形很小;桥梁的静载或动载挠度监测中,桥梁水平位置变化较小,振动特性主要表现在桥梁的垂直振动方向上。在实际监测应用中可根据具体情况利用这些已知先验信息建立参数的约束条件,并将其视为虚拟完美观测,同其他观测量一并处理,从而提高参数估计的精度和可靠性[1-5]。如果建立的是等式约束条件,则形成具有等式约束的平差问题;如果建立的是不等式约束条件,则形成具有不等式约束的平差问题,不等式约束的解算一般较困难,难以用某种统一的解算方法得到其最优估计[6]。在边坡监测应用中,边坡下滑的特性与其地质条件具有很大的关联性,以及在某些实际边坡监测应用中,边坡的坡向以及大致下滑方向可以在监测之前得到,并可以将其视为一种先验信息,从而建立一种先验约束条件。
Kalman滤波是一种对动态系统进行数据处理的方法,常应用于动态定位、变形监测应用中,其能够从带有噪声干扰的信号中提取得到有用信号的参数估计方法,其采用递推的算法并能够在未得到下一期观测数据之前对状态参数做出下一步预测估计[7]。本文针对边坡变形监测应用,根据边坡下滑方向建立参数的等式约束条件,将其引入Kalman滤波方程;其思路是在原有的滤波方法的基础上,增加附有约束信息的条件方程,以改善滤波处理结果,并以某实际边坡监测实例证明本方法的有效性和可行性。
1 等式约束方程的建立
将边坡下滑方向信息引入滤波模型中,增加滤波状态模型信息。假设边坡在水平面投影上沿某直线方向滑动,则该直线方程可以表示为[1]

式中:n,e为边坡监测点的北向和东向坐标参数,vN,vE为监测点在北向和东向的下滑速度,r为直线斜率表示为边坡的下滑方向,m为常数。若将其写成矩阵的形式则可以表达为

其中:Xk=(neuvNvEvU)为第k个历元的状态向量
2 附有等式约束的Kalman滤波算法
在滤波模型中引入约束条件方程,使得状态方程之间满足新的约束条件关系。其解决办法是利用约束方程消去部分状态参数,再进行滤波计算。但是,这样将会改变滤波方程形式以及状态参数个数,以及需要对原来的滤波方程进行修改,使计算复杂化,并且不利于附有等式约束的滤波向不等式约束的滤波的扩展;另一种解决办法是将其并入滤波状态方程和观测方程中,不改变滤波方程递推解形式。下面以最小方差准则进行附加约束条件的滤波公式推导。设增加约束条件后系统的状态方程和观测方程分别为[1,5,8-9]

设增加约束条件后的修正状态估计值为X′(在下面公式推导中略去下标k),则在最小方差估计准则下满足E(PX-X′P2|L)=min的条件下,使得式(6)成立。

由

建立拉格朗日方程,则
由于Kalman滤波估值可以表示为

代入得

将式(10)两边分别对X′,λ求偏导得

解得

增加等式约束条件,即增加新的状态向量参数约束方程。由于Kalman滤波的特点是采用时间域上的递推算法,其不仅适合于计算机编程实现,且存储量小,不需要大量的存储空间。下面以在标准Kalman滤波的基础上推导附有约束条件的滤波递推方程,其利用约束条件对状态模型信息的一步预测值进行修正。
其标准Kalman滤波状态一步预测值为

约束条件方程修正的状态一步预测为

计算预测状态协方差矩阵

滤波增益矩阵

状态估计方程

计算新的状态向量协方差矩阵

3 实例计算分析
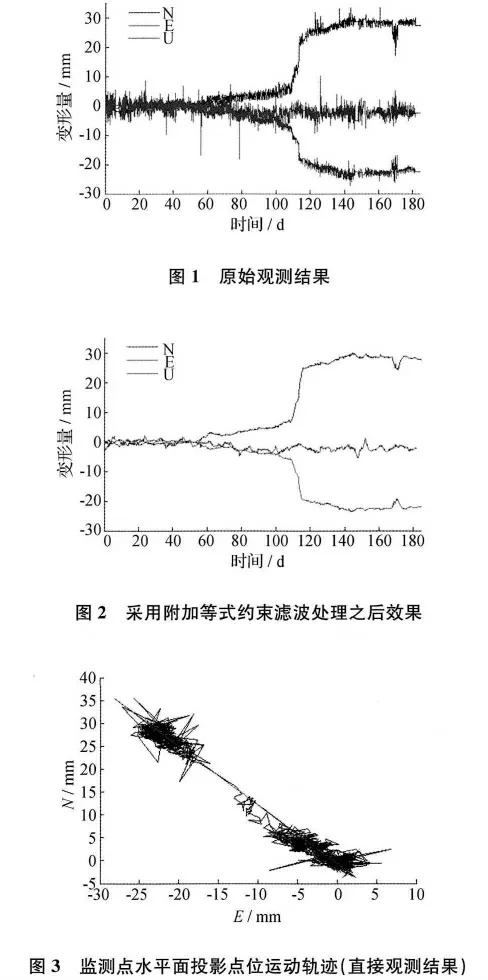
实测数据来源于2008年常吉高速一边坡GPS连续变形监测系统8号监测点,数据通讯采用GPRS无线通讯,连续观测约184d,并隔3h静态解算一个观测结果,由于山区信号质量较差,观测结果受到比较强的噪声干扰影响。边坡的约束条件方程式(1)中r=-0.782 4,m=0。滤波动态系统模型采用常速度模型[10],状态向量Xk=(neuvNvEvU)T。下面分别列出原始观测结果图和采用本文附加约束条件的Kalman滤波方法处理效果图,其中水平方向为时间,竖直方向为变形量,三条曲线至上而下分别表示北方向N,高程方向U,东方向E的变形量,见图1和图2;并画出滤波处理前和分别采用标准Kalman滤波与附有约束条件的滤波方法处理之后的监测点水平面投影点位运动轨迹图,见图3和图4,其中横坐标表示E方向,纵坐标表示N方向,图3中直线表示边坡的下滑方向。

图4 监测点水平面投影点位运动轨迹(滤波之后)
由计算结果可以看出:
由于山区信号质量较差,信号遮挡比较严重,且由于受到多路径效应、周跳、信号中断等影响,从图1中可以看出观测结果受到很强的随机噪声干扰影响和乃至大于观测随机噪声数倍的观测粗差影响;图2可以看出经过附有等式约束Kalman滤波方法能够比较好的去除随机噪声和观测粗差影响;图3中可以看出直接观测结果由于噪声干扰影响,其运动轨迹在边坡下滑方向摆动很大,甚至由于粗差影响完全大角度的偏离了边坡下滑方向;图4中对比于标准Kalman滤波处理效果本文附加等式约束的滤波方法处理后其点位运动轨迹与边坡下滑方向基本一致,其与实际边坡下滑情况相符,也证明了本文方法的可行性和有效性。
4 结束语
在变形监测中,诸多监测对象变形特点的先验信息可以利用,本文利用边坡坡向和下滑方向为一种先验信息,从而利用该先验信息建立等式约束方程并引入Kalman滤波器,经过实例证明本方法具有一定的可行性和有效性。本文方法的不足之处是边坡的下滑方向并非是某完全确定的一个方向,其只是大致趋向于某个方向,解决的办法是建立不等式约束条件方程,将其下滑方向确定为某区间内,从而进行不等式约束解算,但是不等式约束解算困难,难以以某种统一的解算方法得到最优估计;附加等式约束的方法相比而言解算稍微简单并能够得到最优估计,从理论上和计算上更易于被人们所接受,具有一定的实际应用价值。
[1]刘友文,刘经南,朱敦尧.附有道路信息约束的自适应卡尔曼滤波在车载导航中的应用[J].武汉大学学报:信息科学版,2008,33(8):828-830.
[2]戴吾蛟.GPS精密动态变形监测的数据处理方法研究[D].长沙:中南大学,2007.
[3]谢建,朱建军.不等式约束卡尔曼滤波的解算及其统计性质[J].测绘与空间地理信息,2009,32(2):28-31.
[4]王建国,何佩琨,龙腾.道路约束在Kalman滤波中的应用[J].信号处理,2003,19(4):295-299.
[5]胡丛玮,刘大杰,姚连璧.带约束条件的自适应滤波及其在GPS定位中的应用[J].测绘学报,2002,31(S):39-43.
[6]宋迎春,左廷英,朱建军.带有线性不等式约束平差模型的算法研究[J].测绘学报,2008,37(4):433-437.
[7]杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006.
[8]Dan Simon,Donald L.Simon.Kalman fltering with inequality constraints for turbofan health estimation[J].NASA,February 2003.
[9]Dan Simon,Tien Li Chia.Kalman filteing with state equality constraints[J].IEEE Transaction on Aerospace and Electronic Systems,January 2002.
[10]戴吾蛟,伍锡锈.变形监测中Kalman滤波状态模型的比较分析[J].大地测量与地球动力学,2009,29(6):88-92.
[11]伍锡锈,戴吾蛟,罗飞雪.动态变形监测应用中Kalman滤波方法研究[J].工程勘察,2010(8):54-58.



