何 敬,唐 川,王帅永,张可可
(1.成都理工大学 地球科学学院,四川 成都 610059;2.成都理工大学 地质灾害防治与地质环境保护国家重点实验室, 四川 成都 610059;3.中国石油集团工程设计有限责任公司西南分公司, 四川 成都 610031)
无人机影像在地质灾害调查中的应用
何 敬1,2,唐 川2,王帅永2,张可可3
(1.成都理工大学 地球科学学院,四川 成都 610059;2.成都理工大学 地质灾害防治与地质环境保护国家重点实验室, 四川 成都 610059;3.中国石油集团工程设计有限责任公司西南分公司, 四川 成都 610031)
汶川地震后,西南地区进入地质灾害高发期。面对高发的地质灾害,如何快速准确地获取地质灾害信息已经成为亟待解决的问题。文中选取映秀镇老虎嘴滑坡所在位置为实验区,采集实验区10 km2分辨率0.3 m的无人机影像。对获取的无人机影像进行数字摄影测量处理,生成实验区精度0.476 m的正射影像,0.731 m精度的点云数据以及实景三维模型。在这些数字成果的基础上,对老虎嘴滑坡进行定量分析。此次实验验证无人机在高海拔、高落差的地形环境下作业的可行性,探索定量研究地质灾害的方法。
无人机影像;地质灾害调查;老虎嘴滑坡;定量研究
汶川地震后,西南地区进入了地质灾害高发期, 仅2008—2009年间,由地震所触发的地质灾害就达5万余处[1]。当地质灾害发生后,如果全部依靠人员进行调查,其工作量是非常巨大的,而且地质灾害发生的环境通常比较复杂险恶,对人员人身安全构成极大危险。随着遥感技术的快速发展,卫星影像在地质灾害调查领域展开广泛深入的应用研究。杨武年等人利用TM、SPOT、ERS-SAR、RADARSAT等影像提取三峡库区周边大量地质灾害和构造变形的信息,为相关部门进行地质灾害监测与治理提供科学依据[2]。李铁锋等人利用多期SPOT-5影像对福建省建瓯市2005年6月由强降雨引发的滑坡进行解译[3]。鲁学军等人利用高分辨率遥感影像结合DEM对贵州关岭“6·28” 特大滑坡进行遥感解译分析[4]。但是,西南地区由于云雾的影响,很多时候当卫星运转到该区域时并不能够获得理想的影像,使得西南地区卫星影像在数量和质量不能完全满足地质灾害调查需求。
无人机低空遥感系统自研制成功以来,以其机动灵活、成本低廉、操作维护简单等特点已经在很多领域展开了广泛应用[5-10]。自汶川地震后,科研工作者尝试着将无人机低空遥感系统应用于地质灾害调查研究。周洁萍等人通过自主研发的虚拟地理环境数字地球平台构建了汶川地震应急三维可视化遥感影像管理系统,为汶川地震的信息管理、发布和空间决策提供支撑平台[11]。臧克等人应用无人机遥感系统对“5·12汶川大地震”的重灾区北川县城进行航拍,通过图像拼接和几何校正,对比震前的卫星影像,对灾区的受灾情况初步评价[12-13]。马泽忠等人应用无人机低空遥感技术对重庆城口滑坡地质灾害监测,分析无人机低空遥感技术在复杂地形及气象条件下数据获取与数据处理的技术流程和方法,对无人机低空遥感技术在滑坡地质灾害灾情评估和灾损评价中的应用上进行探索[14-15]。温奇等人利用无人机低空遥感系统在云南盈江地震发生后24 h内就获取到覆盖全县城的高分辨率遥感影像,为灾害应急、损毁评估等工作提供了客观数据[16]。在应用中,无人机影像大多只作为一种参考影像,以此对灾情进行快速评估,制定抢险救灾方案,并未对影像中的地质灾害进行精确解译及量测。因此,本文在对无人机数据进行常规处理后,通过点云数据恢复了地质灾害体的三维模型,结合已有调查资料对灾害点的信息进行精确量测,弥补无人机数据在地质灾害信息定量挖掘方面的缺陷,使获得的地质灾害调查数据更加准确全面。
1 实验区概况
映秀镇位于四川省中北部,东接都江堰市,南邻汶川县漩口镇,西靠卧龙自然保护区,北通汶川县城及阿坝州各县,是阿坝州的重要交通枢纽和门户重镇,国道213线、省道303线、都汶高速公路等交通干线交汇处。
汶川地震后,位于震中的映秀镇地质环境受到严重破坏,山体震伤严重,地震裂缝异常发育,岩土体结构松动,诱发形成的滑坡、崩塌和泥石流地质灾害数量众多。在震后地质灾害遥感解译中共查明的灾害物源点有2 868处,其中崩塌2 067处,滑坡717处、泥石流38处及沟道物源46处,部分地质灾害分布如图1所示。在解译过程中,通过影像特征及当地地质结构特点综合分析,发现泥石流沟的中下游离沟道两侧较近的地方都分布着大面积的崩塌、滑坡。其中已经有部分滑坡体产生了蠕变,将滑坡体“悬挂”在陡峭的后壁上,在外力作用下随时可能加速滑落;还有一部分滑坡已经全部脱离了母体,将大量的固体物质堆积到沟道中,伴随着降雨等极端气候的出现,它们随时有可能直接参与到泥石流的活动中。此外区内潜在不稳定地质体在余震、降雨等不利因素影响下极易转化成地质灾害,地质灾害隐患异常严重,一旦在极为不利因素的作用下,暴发大规模地质灾害可能性及风险极大。
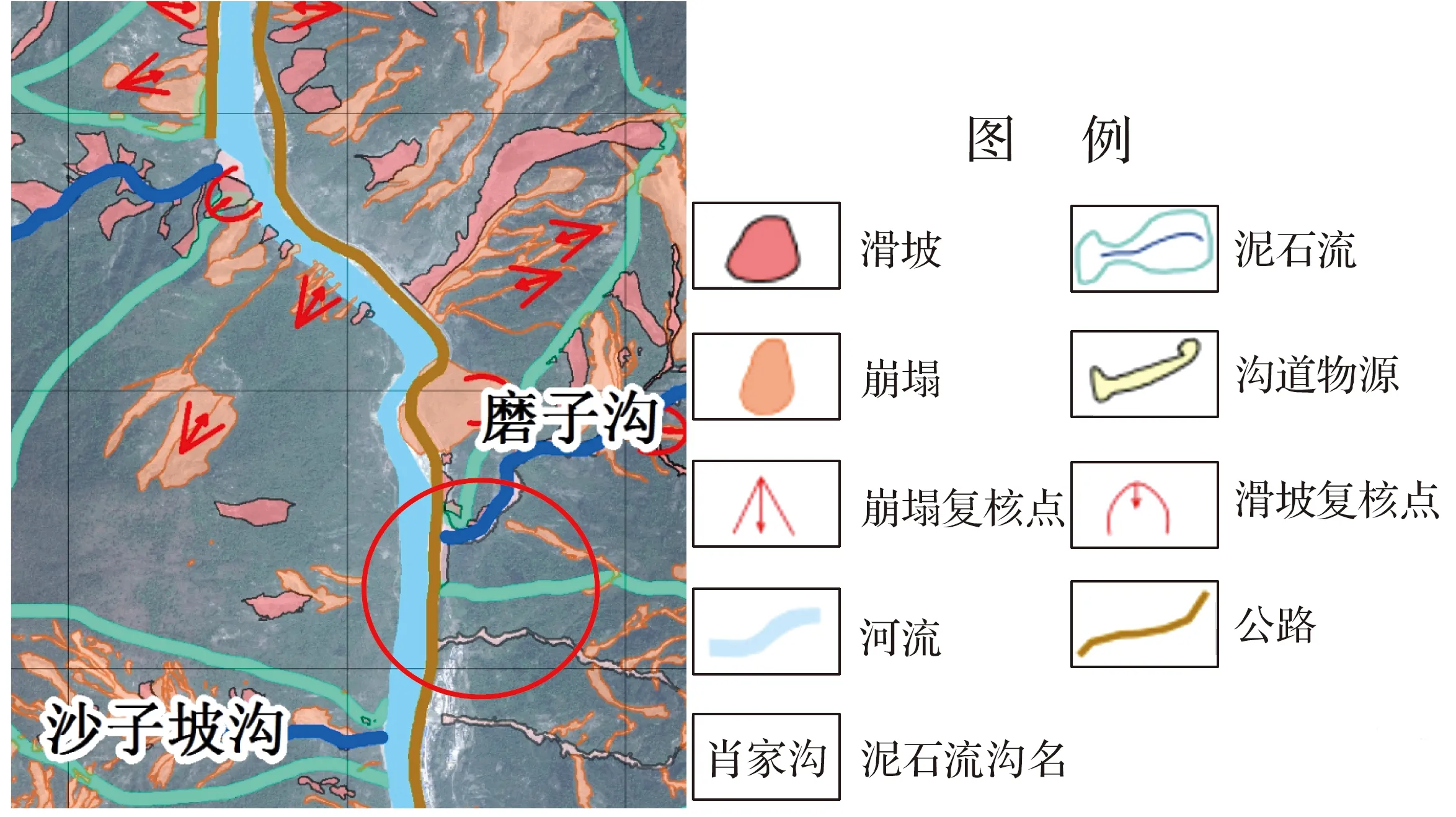
图1 老虎嘴滑坡区域地质灾害分布图
老虎嘴滑坡位于映秀镇西南侧,岷江左岸,属于上述风险极大的滑坡,地震后成为映秀镇重要的地质灾害隐患点之一,具体位置如图1中圆圈所示。2008年地震后不久,当地开始降雨,致使老虎嘴山体产生滑坡,形成的壅塞体阻塞了岷江河道,形成堰塞湖,致使原有的G213国道近两公里公路被淹没,同时还使岷江对岸多个村民组受灾。
2 无人机低空遥感系统及影像获取
2.1 无人机低空遥感系统
无人机低空遥感系统主要包括飞行平台和地面平台[17-18]。飞行平台是无人机低空遥感系统的基础,负责将搭载的影像获取设备送达指定位置,获取目标区域满足摄影测量要求的影像。飞行控制系统负责执行地面控制终端上传的航线计划,记录无人机的飞行方向、飞行状态、飞行位置,并将这些数据通过通讯设备及时回传到地面控制终端。地面控制平台主要负责航线的规划,接收回传的视频数据及无人机的飞行状态数据,根据状态数据分析无人机在空中的作业情况,监测无人机燃料剩余率。
2.2 影像自动获取
此次选取老虎嘴方圆10 km2范围作为试验区,该实验区主要集中在岷江左岸,无人机影像地面分辨率设计为0.3 m。实验区地处高山峡谷地带,地势险峻,不具备跑道和弹射起飞条件。通过实地勘察,选取如表1所示所示位置作为起飞降落点(航线设计中home点),起飞方式为手抛,降落为伞降。

表1 无人机起飞及传感器主要参数
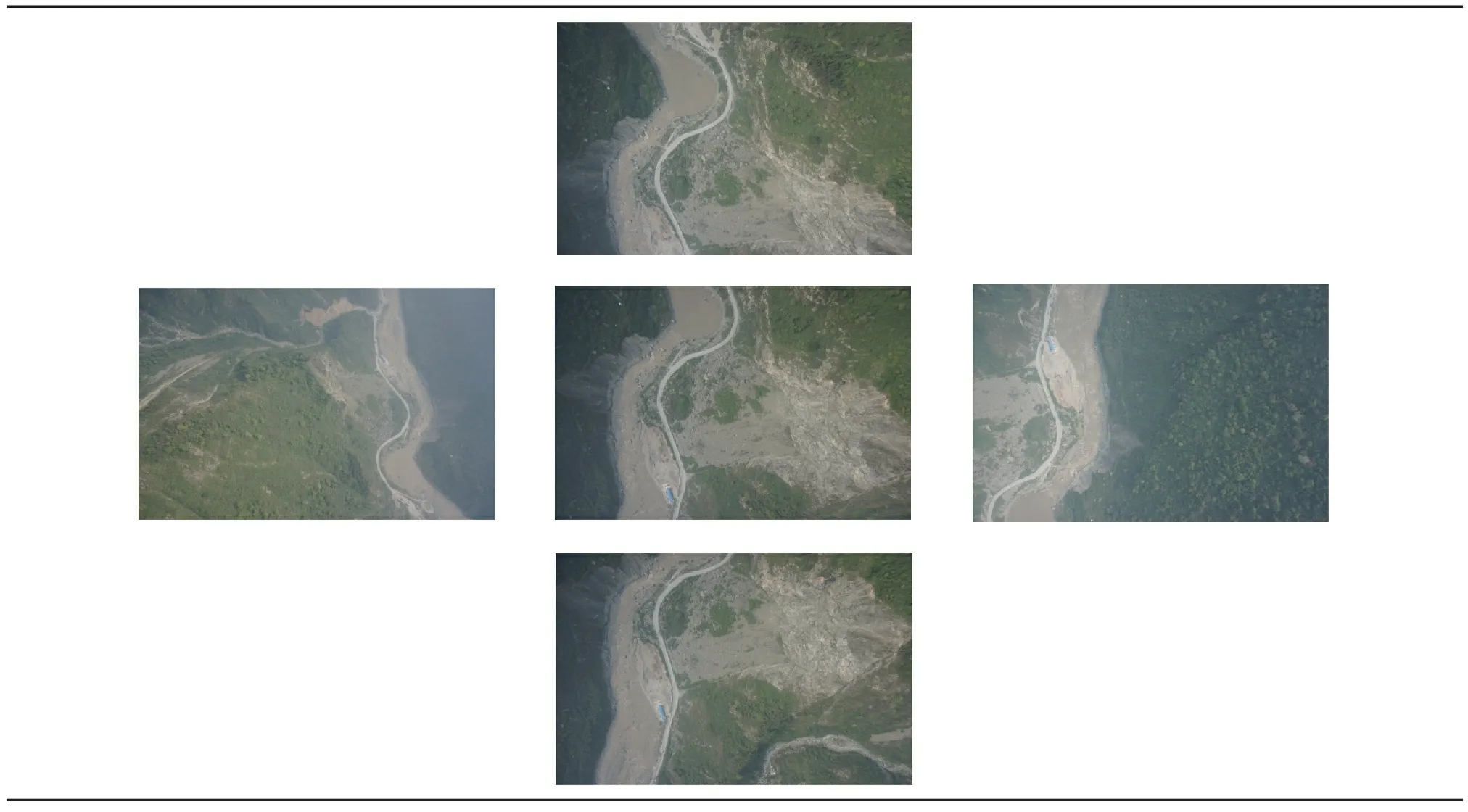
在进行航线规划时,考虑到实验区属于高山地区,地形起伏比较大,且地物特征不明显,为了保证后期数据处理的能够顺利进行,航线规划时旁向重叠度设置在65%,航向重叠度设置在85%。图2为无人机获取的重叠影像。
3 数据处理
无人机上搭载的相机属于非量测型数码相机,影像存在着比较严重的镜头畸变现象,因此在处理之前,需要根据相机的畸变参数对影像进行畸变校正。此次实验区影像共计287张,这些影像由于拍摄时天气差异造成了光线、色泽上的不一致,为了提高影像匹配的稳定性和后续正射影像色彩的一致性,采用Mask(掩模)方法对所有影像进行统一匀光匀色处理[19]。通过飞行控制系统记录的POS数据,对影像进行初步排序定位,这样进行影像同名点匹配时,不仅可以缩小影像匹配搜索范围,而且还能够提高匹配的精度。在完成同名点匹配后,根据共线条件方程进行自由网平差。自由网平差通过后,将地面控制点坐标信息加入,完成模型的绝对定向,然后对影像进行空中三角测量加密,生成整个测区的密集点云数据。通过密集点云数据可以生成测区的正射影像和三维模型,其整个处理流程如图3所示。将控制点加入到自由网中进行绝对定向后,得到的最后平面中误差为0.476 m,高程中误差为0.731 m,造成高程误差的过大原因主要是由于地形起伏落差太大,而且山上和很多陡峭地区无法布设控制点,造成控制点布设不均匀,很多地方无法对其进行很好控制。
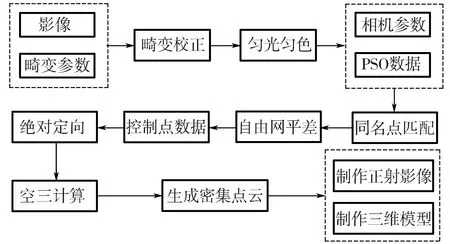
图3 无人机数据处理流程
图4是利用生成的点云数据制作的正射影像经过镶嵌后与Google earth进行叠加的显示效果,从图4中可以看出,其叠加效果很好,房屋道路无明显错位,岷江河流边界吻合较好,滑坡痕迹连接通畅。由于无人机影像获取日期为2015年4月10日,而Google earth影像的时间为2014年12月19日,这段时间恰逢冬春季节,映秀地区降雨稀少,岷江流域的水流量也不是很大,整个实验区没有遭到大规模的雨水冲刷作用。对比实验区内两期数据,发现影像中滑坡大小、数量、位置、堆积区范围均无明显变化,崩塌后碎石所处位置及分布范围也未改变。

图4 正射影像与Google earth叠加效果
图5是Google earth影像在局部细节上与无人机正射影像的对比,选取的是老虎嘴滑坡所在山脉顶端的一处岩石裸露处。从对比图中可以看出,Google earth影像圆圈内被树木的扭曲拉伸所覆盖,不能判别该区域的地物类型,而同样区域在无人机正射影像中则可以明显清晰的判别出该处为基岩出露区,同时上面生长着零星植被,说明该区域近段时间内比较稳固,植被恢复较好,如无明显外力作用,不会发生崩塌。

图5 无人机正射影像与Google影像局部细节对比
4 地质灾害解译
传统的地质灾害解译是利用遥感影像建立遥感解译标志,进行人工判读解译,影像质量和解译人员的经验对解译精度有着直接的影响。很多时候由于解译资料匮乏,地质灾害影像特征不明显,造成划定的解译范围不准确,误判地质灾害类型。图6为利用遥感影像进行传统的二维平面解译地质灾害,从图中可以看出由于影像分辨率的原因,地质灾害的边界难以准确圈定,同时由于缺乏高程信息,地质灾害类型的划分也存在一定的难度。
图7为制作生成的老虎嘴滑坡三维模型,从图7中可以明显划分滑坡的滑动区、堆积区以及滑坡体两侧切割较深的冲沟,根据高程差异直观的显示出滑坡的滑动方向,而这些是基于传统二维平面解译无法实现的。为了对滑坡进行更细致全面研究,可以将该模型360°旋转,观察分析每一个方向角度的特征及变化。根据观察发现老虎嘴滑坡发育于单薄山脊的北西侧,坡脚为堆积区。滑动区呈勺状,左右两侧高中间低,坡度较陡,近似直立,基岩出露,植被不发育。堆积区后缘至前沿呈现缓-陡-缓-陡的特征,堆积体前沿堵塞岷江河道,致使岷江向右岸摆动改道。堆积体的物质构造主要由大块石、棱角状碎块石构成,其主要成分为中-强风化上元古界关山沟单元二长花岗岩,粒径分布呈现了从堆积体后缘至前沿粒径逐渐增大的特征。按照粒径分布特征将堆积区划分为三个区域:碎石区、碎块石区和大块石区,其中碎石区主要位于堆积体后缘,主要由碎石及少量细砂组成;碎块石区主要由块石、碎石和少量大块石组成;大块石区主要为较完整的块石,局部架空。另外,滑坡后缘节理极其发育,有大量的危岩体,在外荷载作用或降雨条件下易失稳,危险性较大。

图6 传统二维解译
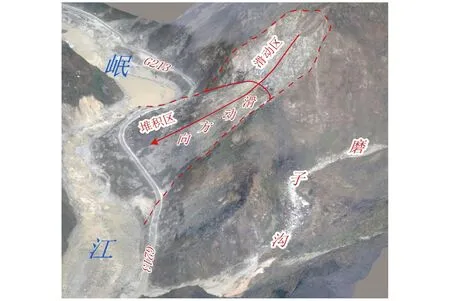
图7 三维立体解译
无人机影像制作生成的三维模型,除了具有立体直观性外,由于处理过程中添加了控制点数据,使其整个成果都恢复到大地测量坐标系,因此模型还具有可量测性。当三维模型以矢量点云形式显示时,可以对其进行深层次的信息挖掘。表3及图8列出了从点云数据中量测出的信息,其中滑动方向、最大落差、最大水平位移是在其侧视图的基础上进行量测,而滑坡宽度、滑坡面积、滑坡体积是在其前视图基础上进行量测,此处滑坡体积的起算基准是滑坡堆积区的水平面。这些参数为定量化研究地质灾害提供了基础数据,对地质灾害监测、分析具有重要的指导意义。

表3 滑坡参数统计
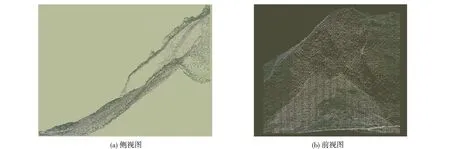
图8 滑坡影像
5 结束语
通过对老虎嘴滑坡的无人机航拍实验,验证无人机应用于高山峡谷地带进行地质灾害调查的可行性。此次应用实验中获取的影像除做常规影像参考外,最重要的是将遥感信息提取技术与地质灾害分析结合起来。利用摄影测量技术恢复地质灾害体的三维模型,改进常规的二维平面遥感影像解译方法,不仅提升解译精度,而且使得解译信息具有可量测性,这为定量研究地质灾害提供极为重要的数据,同时本文所做的应用探索也将为今后的无人机在地质灾害信息挖掘方面提供一些帮助和启发。
[1] 许冲,戴福初,姚鑫.汶川地震诱发滑坡灾害的数量与面积[J].科技导报,2009(11):79-81.
[2] 杨武年,濮国梁,CAUNEAUF,等.长江三峡库区地质灾害遥感图像信息处理及其监测和评估[J].地质学报,2005,79(3):423-430.
[3] 李铁峰,徐岳仁,潘懋,等.基于多期SPOT-5影像的降雨型浅层滑坡遥感解译研究[J].北京大学学报(自然科学版),2007,43(2):204-210.
[4] 鲁学军,史振春,尚伟涛,等.滑坡高分辨率遥感多维解译方法及其应用[J].中国图象图形学报,2014,19(1):141-149.
[5] 韩杰,王争.无人机遥感国土资源快速监察系统关键技术研究[J].测绘通报,2008(2):4-6.
[6] 汪小钦,王苗苗,王绍强,等.基于可见光波段无人机遥感的植被信息提取[J].农业工程学报,2015(5):152-159.
[7] 曹洪涛,张拯宁,李明,等.无人机遥感海洋监测应用探讨[J].海洋信息,2015(1):51-54.
[8] 程翔,杨波,李倩霞.无人机摄影测量在水体污染评估中的应用[J].测绘与空间地理信息,2016,39(8):180-182.
[9] 彭向阳,刘正军,麦晓明,等.无人机电力线路安全巡检系统及关键技术[J].遥感信息,2015(1):51-57.
[10] 吕立蕾.无人机航摄技术在大比例尺测图中的应用研究[J].测绘与空间地理信息,2016,39(2):.116-118.
[11] 周洁萍,龚建华,王涛,等.汶川地震灾区无人机遥感影像获取与可视化管理系统研究[J].遥感学报,2008(6):877-884.
[12] 臧克,孙永华,李京,等.微型无人机遥感系统在汶川地震中的应用[J].自然灾害学报,2010(3):162-166.
[13] 李启源,王明常,王凤艳,等.高分一号遥感影像地质灾害信息提取方法研究[J].测绘与空间地理信息,2016,39(2):17-20.
[14] 马泽忠,王福海,刘智华,等.低空无人飞行器遥感技术在重庆城口滑坡堰塞湖灾害监测中的应用研究[J].水土保持学报,2011(1):253-256.
[15] 姜会义,张学珍,张学萍,等.车载无人机在测绘应急保障中的应用[J].测绘与空间地理信息,2016,39(7):171-172.
[16] 温奇,陈世荣,和海霞,等.无人机遥感系统在云南盈江地震中的应用[J].自然灾害学报,2012(6):65-71.
[17] 王军锋,乔明,魏育成,等.无人机机载SAR在地理国情监测中的应用研究[J].测绘与空间地理信息,2016,39(5):61-64.
[18] 孙杰,林宗坚,崔红霞.无人机低空遥感监测系统[J].遥感信息,2003(1):49-50.
[19] 胡庆武,李清泉.基于Mask原理的遥感影像恢复技术研究[J].武汉大学学报,2004,29(4):319-323.
[责任编辑:李铭娜]
Application of UAV images to geological disaster investigation
HE Jing1,2,TANG Chuan2,WANG Shuaiyong2,ZHANG Keke3
(1.School of Geoscience, Chengdu University of Technology, Chengdu,610059,China;2.State Key Laboratory of Geohazard Prevention and Geoenvironment Protection, Chengdu University of Technology, Chengdu 610059,China;3.CNPC Engineering Design Co.,Ltd.,Southwcst Branch,Chengdu 610031,China)
Southwest China has entered into a high-incidence period of geological disasters after Wenchuan Earthquake. Under this situation, it becomes an urgent issue to gain the geological disaster information quickly and precisely. This paper,taking the Tiger-mouth landslide in Yingxiu as the case, collects the UAV images of 10 km2with a resolution of 0.3 m and generates the orthophoto with 0.476 m accuracy and point cloud data of 0.731 m accuracy. Finally, a real-scene 3D model is formed after digital photogrammetric processing of the UAV images. Based on these digital products, a quantitative analysis is carried on. This experiment verifies the feasibility of UAV using in high-altitude environment with significant elevation difference, and explores the methods of quantitative research of geological disasters.
UAV image; geological disaster investigation; Tiger-mouth landslide; quantitative study
引用著录:何敬,唐川,王帅永,等.无人机影像在地质灾害调查中的应用[J].测绘工程,2017,26(5):40-45.
10.19349/j.cnki.issn1006-7949.2017.05.009
2016-03-28
国土资源部地学空间信息技术重点实验室开放基金(KLGSIT2014-04);地质灾害防治与地质环境保护国家重点实验室团队项目(SKLGP2012Z002)
何 敬(1983-),男,博士.
P231
A
1006-7949(2017)05-0040-06



