张坤鹏,于广瑞,顾广杰
(61206部队,辽宁 大连 116023)
利用差分GNSS获取高精度无人机影像外方位线元素
张坤鹏,于广瑞,顾广杰
(61206部队,辽宁 大连 116023)
目前,微小型无人机遥感系统定位精度低,需要布设大量地面控制点,才能满足空三和测图精度要求,为提高无人机遥感系统影像的后期处理效率,文中研究利用差分GNSS模块,结合后差分算法提高POS数据精度,并通过位置标定、相机时间延迟改正等关键技术方法开展研究,最终获得高精度相机曝光时刻的位置信息,以此为基础,集成一套基于差分GNSS的无人机遥感系统。通过实验,最终实现以少量地面控制点获取高精度无人机影像外方位线元素,提高无人机影像后期处理效率,具有一定工程应用价值。
无人机;差分GNSS;位置标定;相机延迟改正;空三加密
随着地理信息产业的蓬勃发展,摄影测量与遥感作为一种提供地理信息数据采集的新型技术,得到了前所未有的发展。作为卫星遥感和航空摄影测量等信息采集手段的有力补充,无人机遥感系统具有机动性能好、应急响应迅速等特点,在国土利用的现势性调查和小区域大比例尺成图等方面发挥着重要作用。
由于微小型无人机受载荷限制,无法搭载高精度的定位定向系统,故其POS数据均直接来自于飞控导航系统的GNSS定位信息,定位精度大致在5~10 m,远远达不到大比例尺摄影测量所需要的POS数据的精度。因此,无人机的定位精度多依赖于大量地面控制点,严重限制了微小型无人机遥感系统快速、高效优势的发挥。虽然现阶段国内外市场上流行的无人机遥感平台已有一些基于GNSS RTK的微型无人机遥感系统,如瑞士eBee公司发布的eBee RTK无人机遥感系统,价格昂贵,且多以提高无人机导航定位精度为目的,并未考虑真正意义上相机曝光时刻的位置信息,本文提出一种基于差分技术的无人机系统集合,通过几种改正方法,得到高精度无人机影像外方位线元素,为后期空三加密、大比例尺测图等应用提高精度与效率。
1 差分系统改装方案设计
U-blox公司研制的NEO-M8T GNSS接收机专为低功耗和低成本而设计,不受所采用的卫星定位系统的限制。两台接收机通过对载波相位观测值、伪距测量值以及定位解算所需要的电文、星历等参数的记录,采用RTKLIB软件对所接收的数据进行差分后处理,实现RTK解算。在这个过程中飞控系统对相机曝光点和GNSS数据进行协调,通过差分后处理,就可以得到精度较高的POS数据。
将NEO-M8T开发板与供电电池利用热熔胶安装在中心板几何中心位置,防止无人机重心发生偏移,将电池供电接口和开发板供电接口置于无人机中心板底部外侧,便于为开发板供电,开发板与电池安装情况如图1所示。测量天线安装于中心板防雨罩圆形面板上面,并位于机头与机尾的连接线上,用热熔胶使其紧固,连接线将开发板与测量天线相连接,天线安装情况如图2所示。
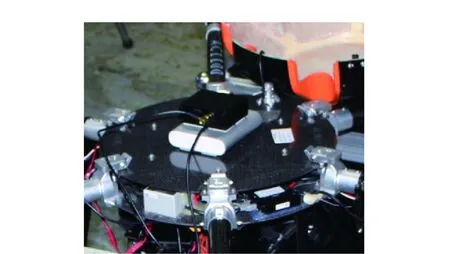
图1 GNSS模块与电池安装图

图2 机载测量天线安装图
无人机搭载GNSS模块,与地面基准站进行实时测量,结合差分后处理软件,构成一套集成系统,如图3所示。旋翼无人机搭载的接收机与地面站的接收机通过同时对相关参数进行记录,即可利用RTKLIB软件对所接收的数据进行差分后处理,实现RTK解算,得到较高精确度的无人机飞行定位信息。
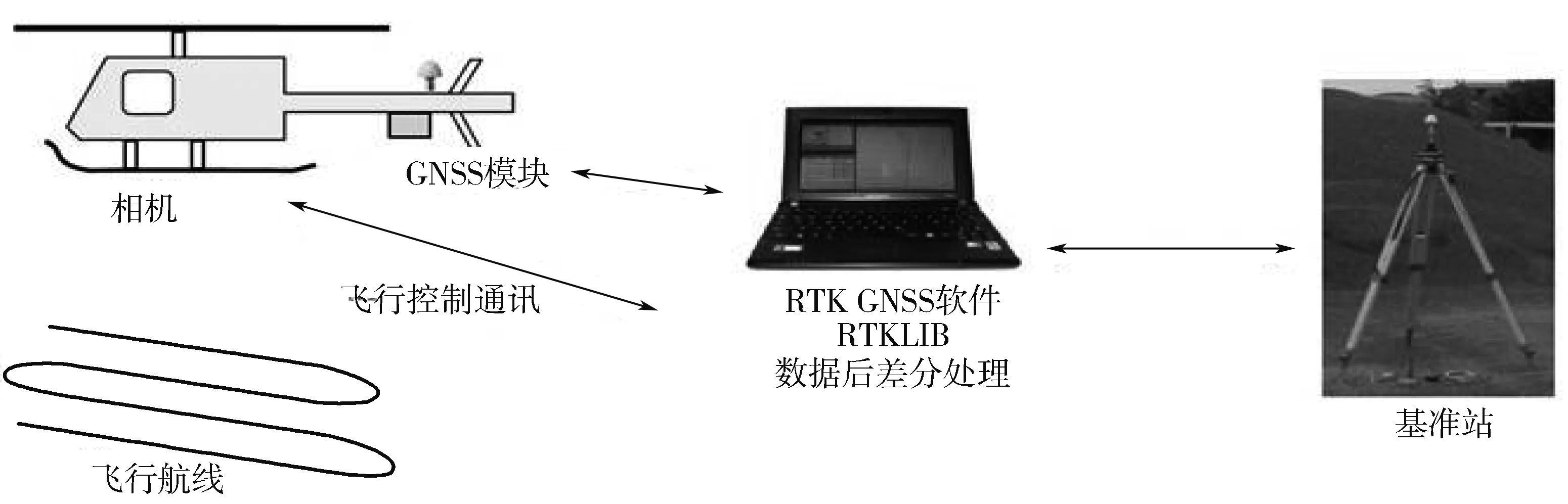
图3 无人机差分GNSS集成系统
2 差分系统的关键技术研究
2.1 天线相位中心与相机中心位置关系的标定
差分模块与测量天线安装在旋翼无人机上,由于天线相位中心与相机中心位置存在几何偏差,导致差分处理的POS数据并非影像的外方位线元素,因此需要标定出两者的位置关系。
无人机在飞行作业过程中,天线相位中心与相机中心存在的空间相对关系,对于航空摄影测量来说属于系统误差,但飞机的飞行状态不稳定,该部分误差的影响是实时变化的,因此,只能近似消除这部分误差。实验中精确测得地面各个目标点的坐标为(Xi,Yi,Zi),飞机在近似水平状态,对地面目标点同时拍摄,所得标志点在像空间坐标系中的坐标为(xi,yi,zi),设像空间坐标系的原点在参考坐标系中的坐标为(XS,YS,ZS),相对于参考坐标系的姿态旋转参数为(Rx,Ry,Rz),如图4所示,设地面上其中3个点A,B,C对应图像上A′,B′,C′。
则可建立共线方程为
(1)
其中旋转矩阵

(2)
ai,bi,ci由旋转角度Rx,Ry,Rz确定。由共线方程建立空间后方交会模型就可以求得相机坐标系与参考坐标系之间的6个实时转换参数XS,YS,ZS和Rx,Ry,Rz,结合GNSS测量结果,即可以确定天线相位中心与相机中心的位置。
实验中,采用最小二乘平差,如图5所示,在地面布控9(3×3)个测量控制点,利用莱卡TP1201+全站仪经设站测得点位坐标pi(xi,yi)。

图4 空间后方交会
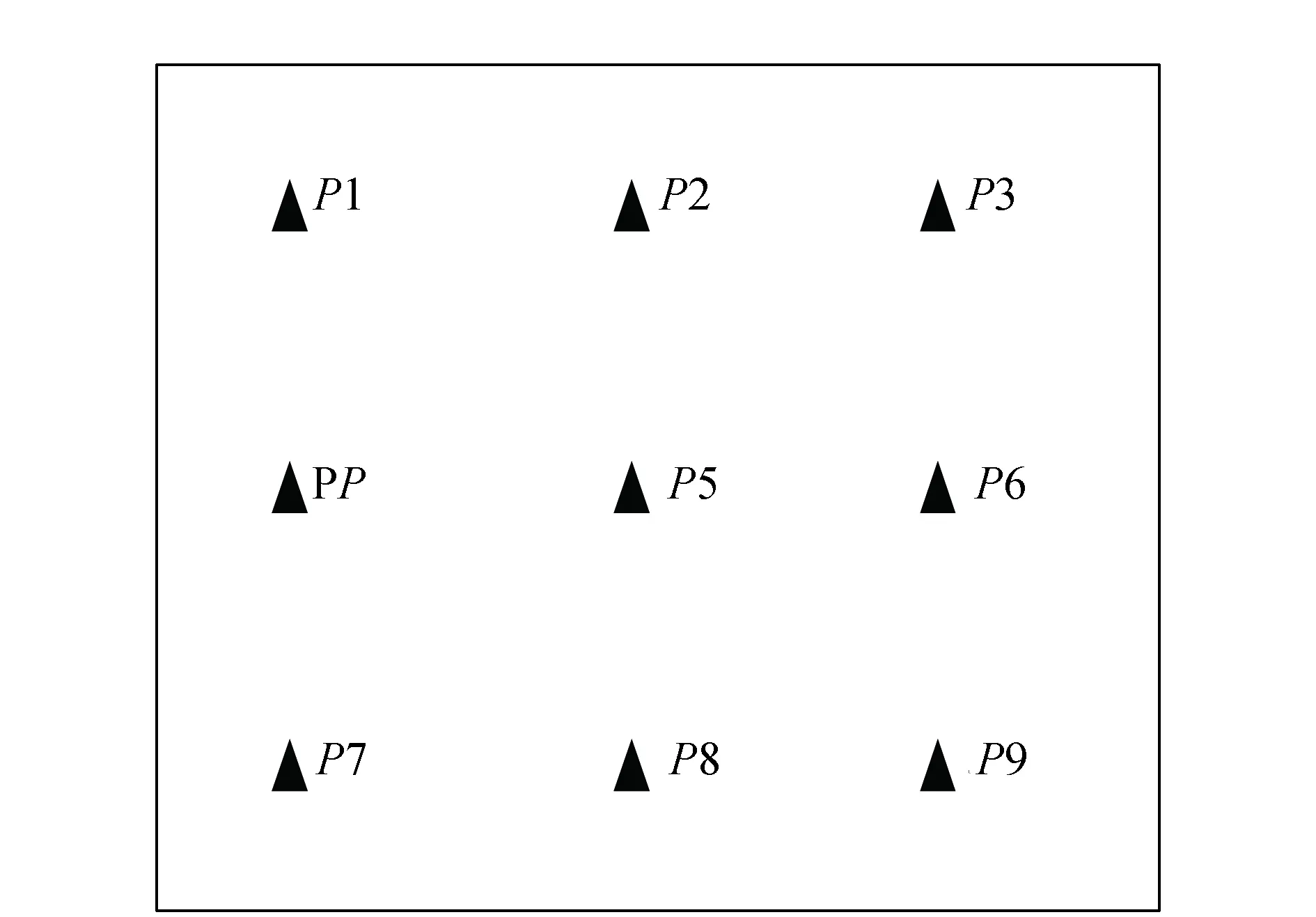
图5 标定场控制点布置分布图
在静态情况下,人为模拟无人机沿着指定飞行方向拍摄地面9个控制点,在此同时,基准站和飞机上的差分模块记录该静态状态下的位置信息,该实验共进行三组影像拍摄,每组拍摄10张。对于相机拍摄的影像,通过编程进行单张影像空间后方交会,求解得到每组影像相对于参考坐标系下的外方位元素,如表1所示。

表1 相机位置测量结果
对差分GNSS系统获得的数据,利用RTKLIB软件,经过后处理得到无人机上测量天线相位中心的坐标,如表2所示。
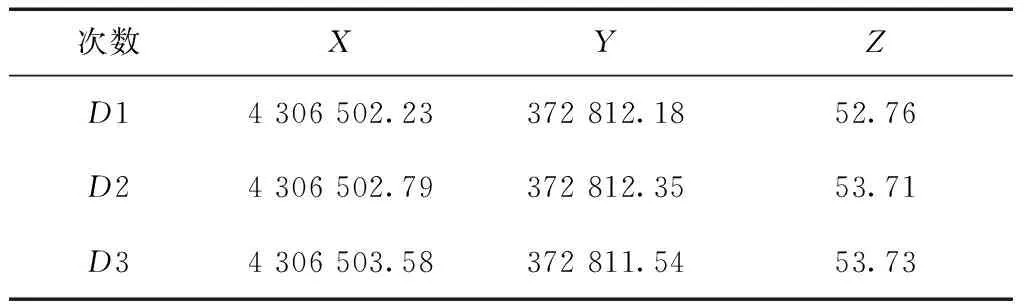
表2 GNSS测量结果

2.2 相机延迟改正方法
目前无人机遥感系统中相机的拍照是由飞行控制系统控制的,在进行摄影测量作业时一般采用的是每间隔固定的距离进行一次曝光,通过上述的GNSS后差分处理的方法虽可大幅度提高外方位线元素的原始精度,但飞行控制系统所记录的曝光时刻并非是相机真正曝光的时刻,因为从飞行控制系统发出曝光的指令到相机真正的曝光有一段响应时间,加上无人机飞行系统作业时的速度过快,在一定程度上降低了外方位线元素的精度。为解决这一问题,研制一款可以记录相机曝光时间并将该时间写入GNSS原始数据的改正模块。改正模块的功能结构如图6所示。这样一来,相机曝光时间得到精确而真实的记录,相机延迟得到改正,相机与模块连接情况如图7所示。

图6 改正模块功能结构
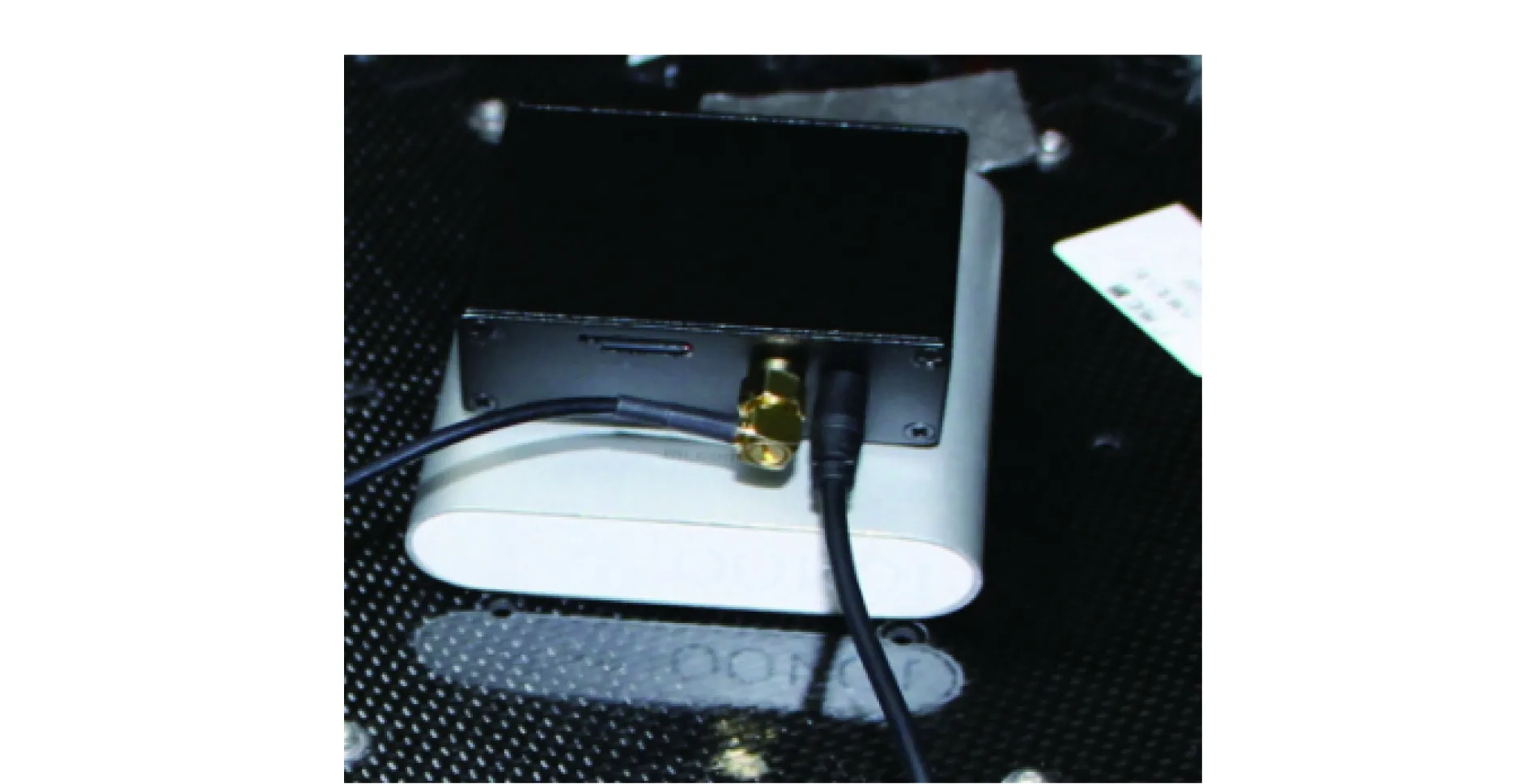
图7 记录相机曝光时间连接线
2. 3 差分GNSS获取无人机影像外方位线元素的综合分析
根据上述分析,采用差分技术获取无人机影像外方位线元素需要考虑天线相位中心与相机中心点的位置关系以及相机延迟改正问题,现以某次飞行任务为例,简述系统获取影像外方位线元素的方法。
设无人机飞行航线如图8所示,航线为东西方向,由空间几何关系可知,相机与天线相位中心位置关系的影响为
(3)
当飞机沿航线由西向东飞行时,α≈90°,差分GNSS模块记录的每个点位转换为相机中心点的坐标为
(4)
当飞机沿航线由东向西飞行时,α ≈ 270°,差分GNSS模块记录的每个点位转换为相机中心点的坐标为
(5)
在确定相机曝光时刻后,就可以根据拍照时刻前后差分GNSS记录的坐标内插计算得到拍照时刻天线相位中心的位置。
如果t=n×0.1,n=0,1,2,3,…
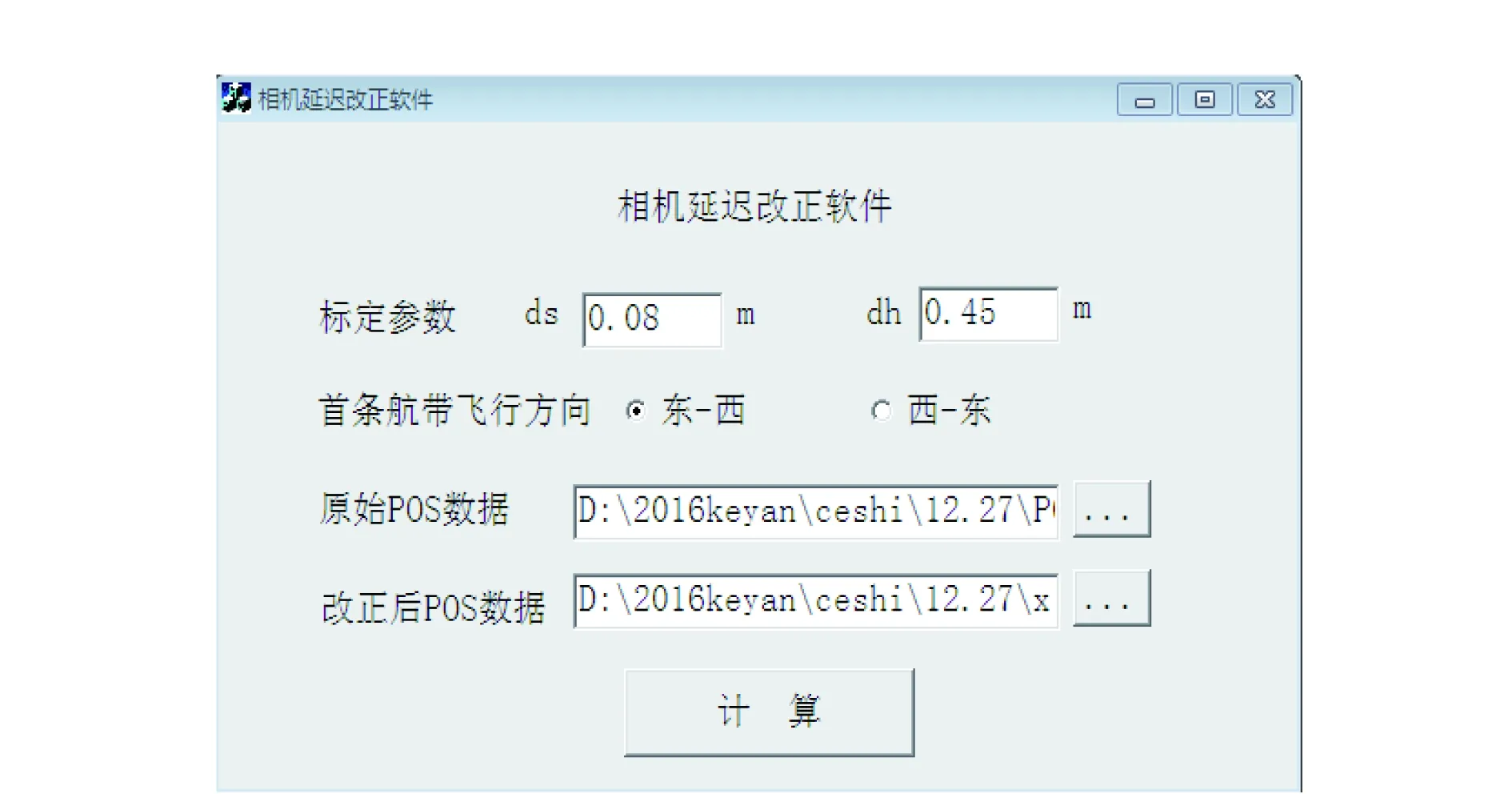
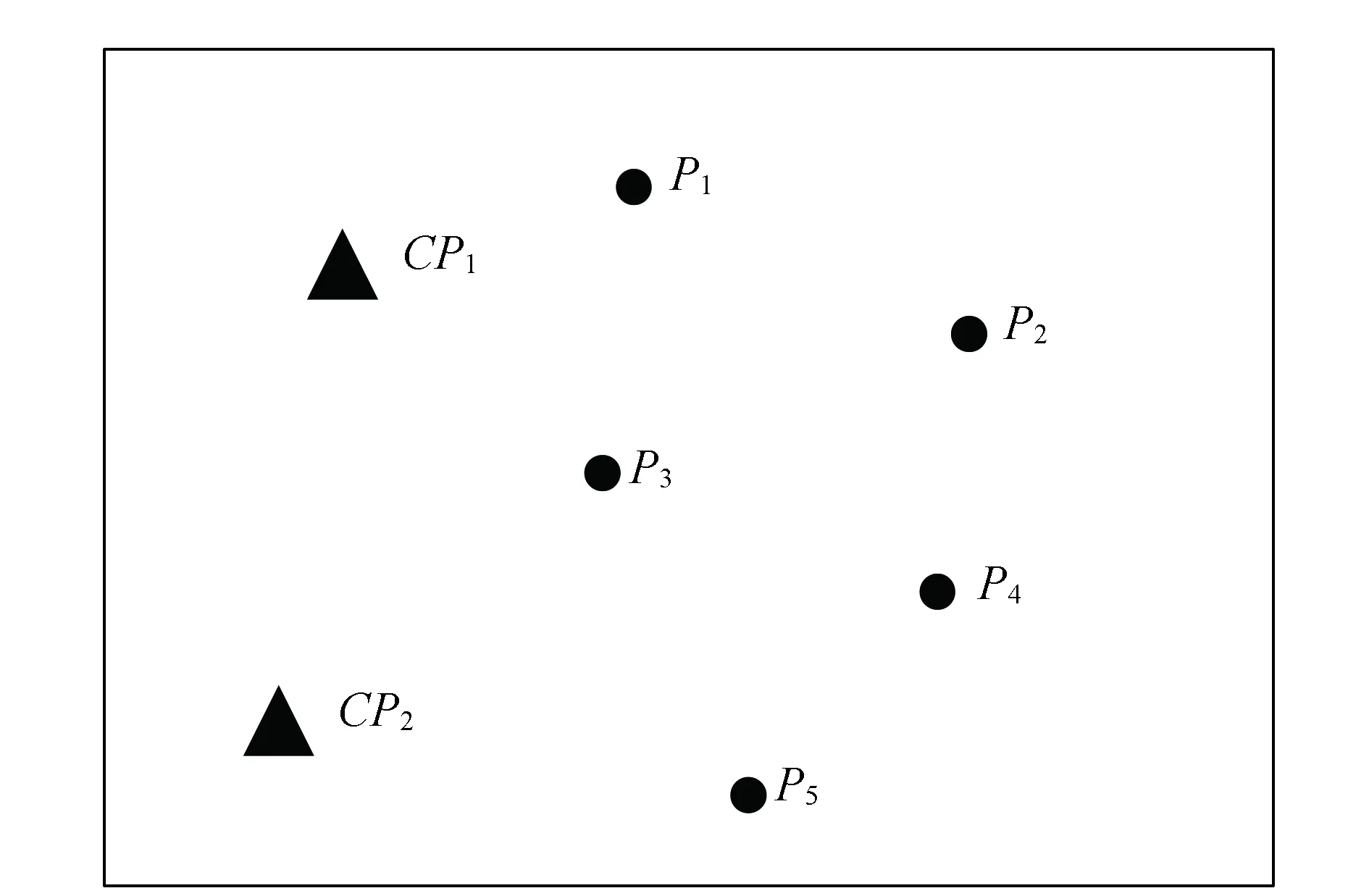
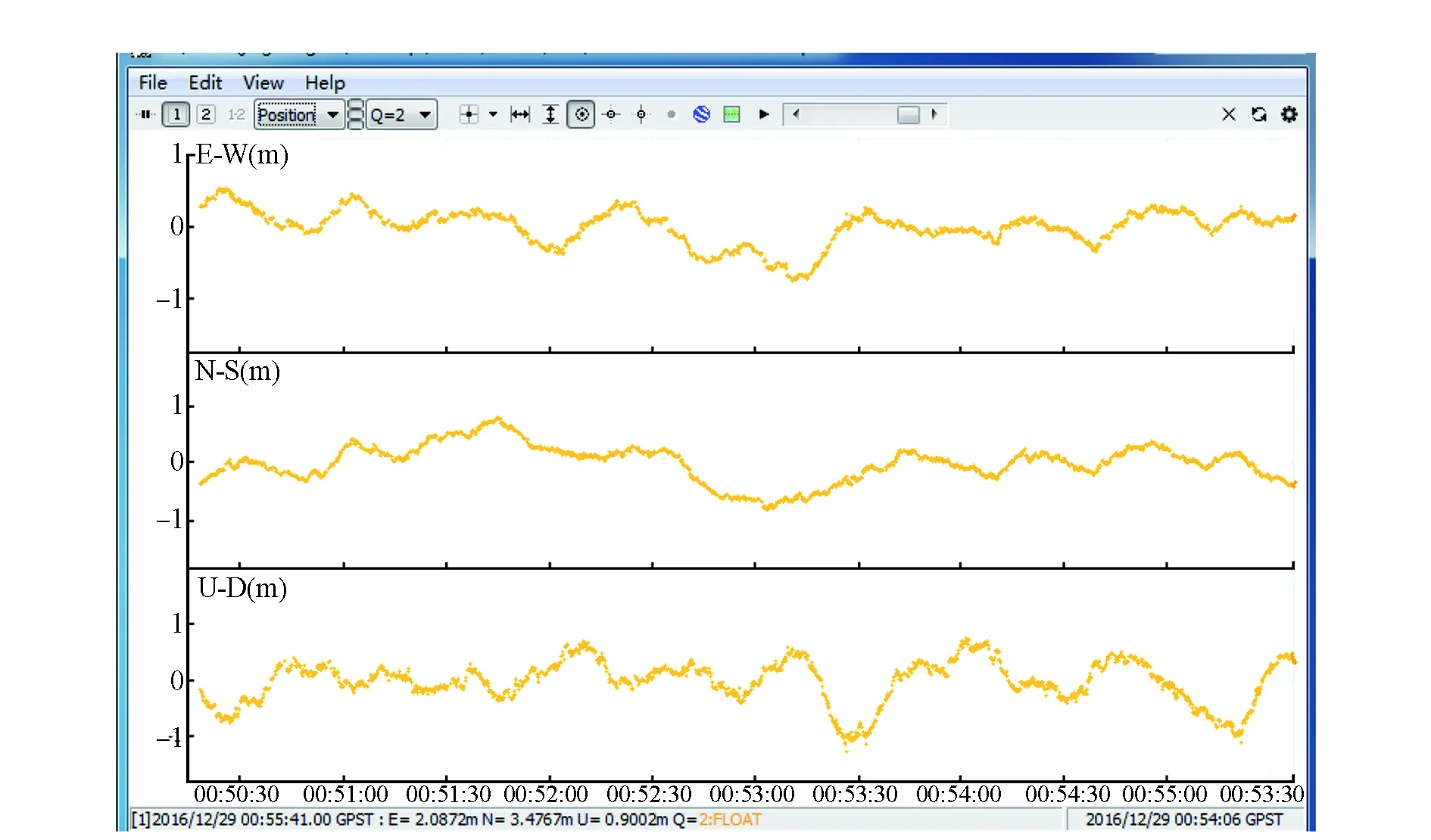
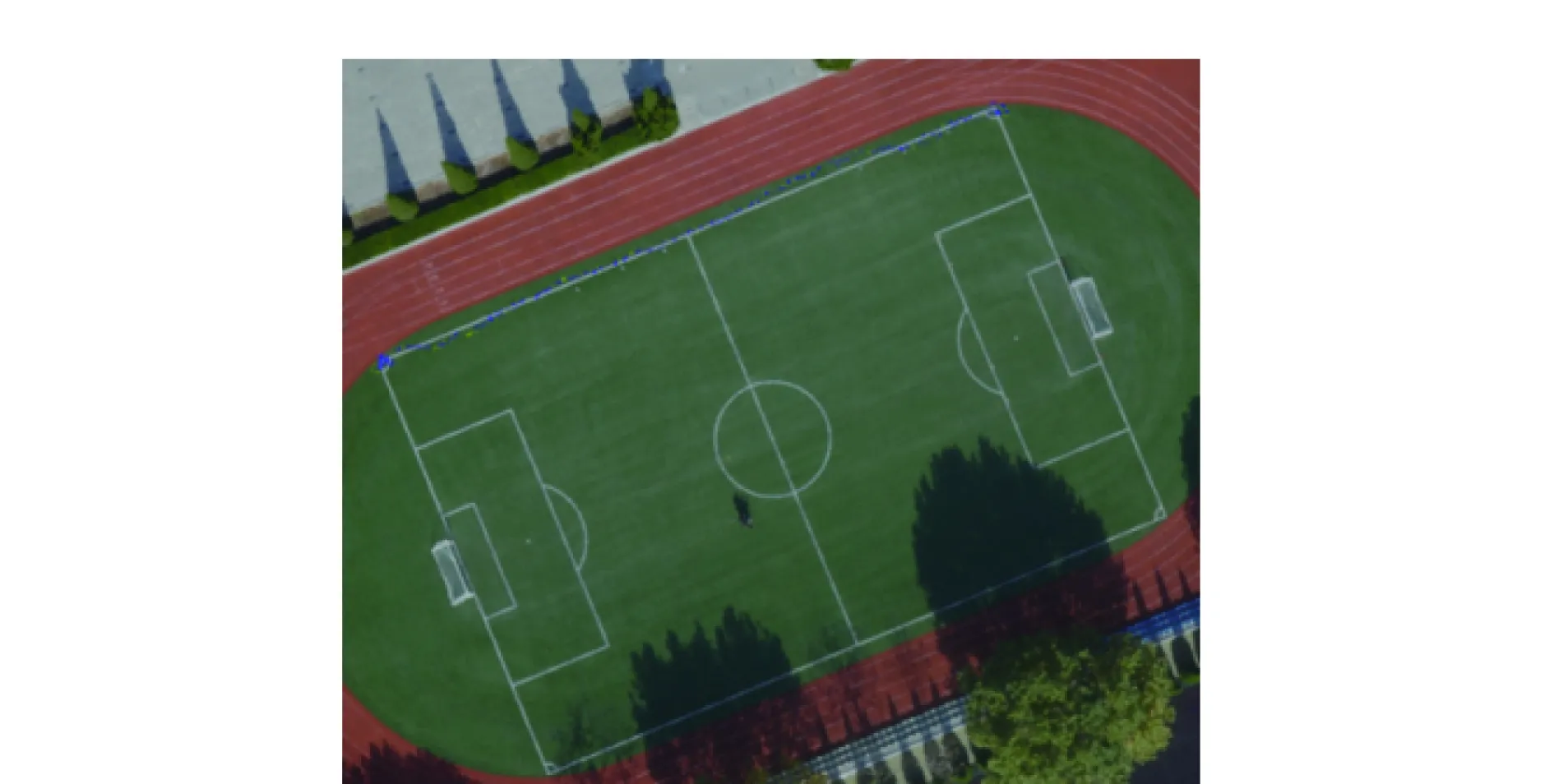
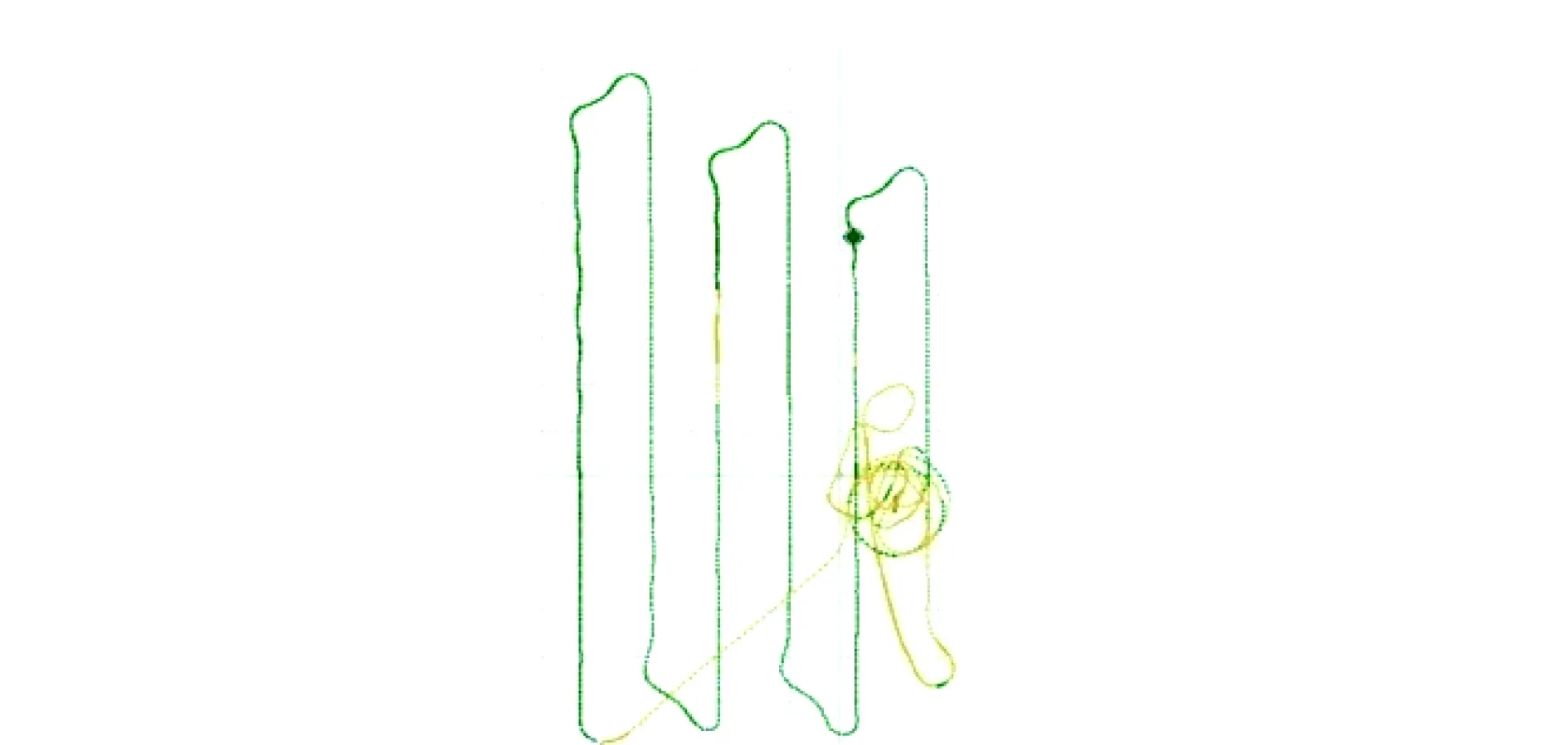
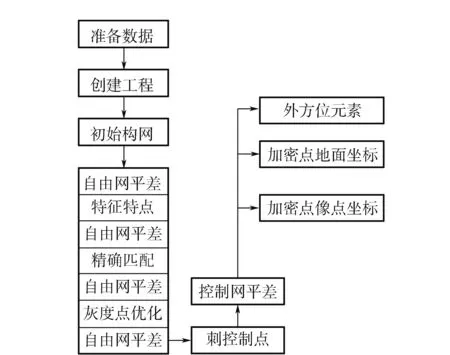
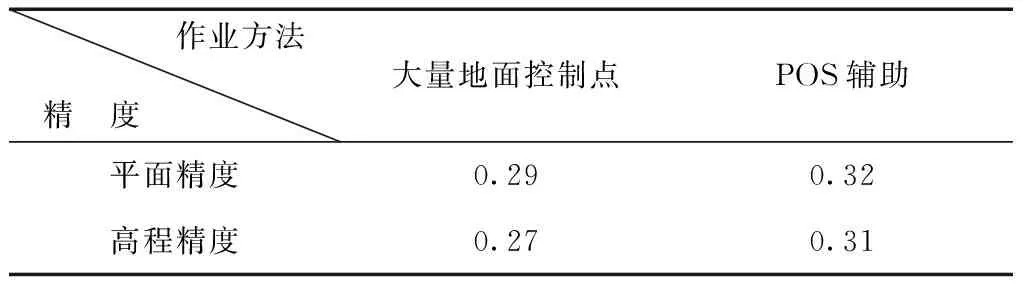
如果n (6) 经过后期编写相机延迟改正软件,如图9所示,根据相机拍照时刻前后差分GNSS模块记录的数据进行内插处理,同时改正天线相位中心与相机中心的位置,得到最终每次拍照时刻的精准坐标。 图8 无人机航线分布图 图9 相机延迟改正软件界面 Ublox公司研制的NEO-M8T GNSS接收机专为低功耗和低成本而设计,不受所采用的卫星定位系统的限制。两台接收机通过对载波相位观测值、伪距测量值,以及定位解算所需要的电文、星历等参数的记录,通过RTKLIB软件对所接收的数据进行差分处理,得到精度较高的POS数据,为验证差分模块的测量精度,设计相关的实验。 实验目的是在接收机收星比较良好的情况下,NEO-M8T模块在RTKLIB环境下定位测试结果是否满足厘米级测量精度,且在低速稳定的动态情况下,模块接收固定解的情况。测试实验器材包括NEO-M8T模块两套(芯片,MINI USB线,GNSS天线),三脚架,已知点坐标,莱卡TC1201+全站仪,棱镜等。 3.1 验证NEO-M8T模块的静态测量精度 如图10在地面布设两个控制点(CP1,CP2)和5个测量点位(p1,p2,p3,p4,p5),利用莱卡TC1201+全站仪经控制点设站测得点位坐标,而后利用NEO-M8T差分模块进行逐点测量,每个点位测量10 min,差分模块的采样频率为10 Hz,在RTKLIB环境下差分后分析,某一点位数据随时间的变化情况如图11所示。 图10 GNSS模块测量点位分布 图11 差分GNSS数据质量分布 可以看出采样数据经处理后分布较为稳定,但波动在正负1 m间,3个方向未观察到系统性的测量误差,在计算中,利用其波动范围的平均值作为参考,剔除偏离平均值大于0.3 m的数据,对余下的数据进而取平均值作为最终静态测量结果,得到测试点位的测量结果如表3所示。 因此,采用NEO-M8T在RTKLIB正常状况下能够满足分米级的需求,如果环境比较好状况下,基本能做到厘米级的状态。 表3 GNSS模块点位测量结果 m 3.2 测试NEO-M8T模块的动态差分轨迹近似程度 首先利用全站仪测量近似直线的足球场边沿端点坐标J01(4 306 492.45,372 827.51,49.64)、J02(4 306 516.00,372 875.24,49.65),而后将差分模块安装在标杆上,由人扛在肩膀沿着线路由一端走向另一端,对采集的数据进行差分后处理,将图形按照全站仪测量数据进行定向后得到如图12所示采样点分布情况,与全站仪测量的直线比较,得到固定解率p=81%。在评定差分GNSS模块测量的固定解点位偏离直线的误差同样采用最小二乘法,即以各采样点对于基准直线的偏离值的中误差来评定,得到0.11 m。 图12 模块动态精度测试情况 可以看出,处理后所得轨迹与真实行走轨迹位置近似,可近似估计差分处理后所得数据精度。 3.3 在飞机上的飞行轨迹测试 在旋翼无人机上,搭载GNSS模块,经过差分后处理所得到的数据具有较高的固定率,如图13所示,其所得轨迹与真实行走轨迹位置基本吻合,在微型无人机等高动态移动目标上,低成本GNSS模块差分后所得数据具有较高的固定率,其解可以为微小型无人机遥感系统提供更精确的外方位线元素初值。 图13 差分GNSS系统无人机飞行轨迹 综上,实验初步验证了采用低成本GNSS模块后差分处理的方法,可以提高外方位线元素的精度。 4.1 资料获取 任务实施以六旋翼无人机机搭载索尼NEX7畸变相机航摄,同时差分GNSS模块实时测量,飞机飞行航高150 m,相机焦距为10.4 mm,影像分辨率为3648像素×5472像素,像元尺寸2.4 um,航摄满足航向影像重叠度约为80%,旁向影像重叠度约为70%,航线由东向西,共10条。 相机检校参数文件,主要包括相机像主点坐标、相机焦距、像元大小、径向畸变差系数(K1,K2)、切向畸变差系数(P1,P2)、CCD非正方形比例系数a,CCD非正交性的畸变系数b等。 POS及控制资料,根据航带和相片数量布设一定数量的控制点,同时在航摄区域布设一定数量的检查点,差分GNSS模块获取拍照时刻每张照片的外方位线元素。 4.2 处理方法 采用Geoway for UAV无人机数据处理系统软件,以实际完成影像处理项目为例,采用高精度影像外方位线元素完成无人机影像数据作业流程和关键技术环节,最终成果满足工作需求,实现高效、高精度、高可靠性。 将原始影像、POS数据、相机参数文件、控制点文件准备完毕后,即可进行自动空三解算,总体工作流程如图14所示。 图14 Geoway AAT的总体工作流程 在空三加密过程中,首先采用传统方法,即使用无人机系统自带的GPS定位信息作为POS数据,同时利用地面按航带布设的大量控制点进行空三加密。然后采用差分GNSS模块获得的POS数据及仅航摄区域4个角点的控制点数据进行空三加密,两种方案得到的精度结果如表4所示。 表4 两种方案空三精度比对 m 经过比较,实验区要达到1︰1 000地形测图规范要求,区域网周边需要每隔4条基线布设1个平高地面控制点、区域网内部需要每隔4条基线布设1个高程地面控制点才能满足精度要求。而采用POS辅助空中三角测量技术后,仅需要区域四角4个平高地面控制点就可满足精度要求,与传统光束法区域网平差相比,差分GNSS辅助光束法区域网平差减少了大量的外业工作量。 本文在旋翼无人机的基础上,运用低成本GNSS模块结合特定的改进方法,集成一款基于GNSS RTK的微型无人机遥感系统,通过实验验证了GNSS模块定位精度的可靠性,并投入生产应用。该系统不仅改善了POS数据精度,还大大提高了作业效率,在很大程度上促进了无人机测绘的发展。 [1] 黄丁发,熊永良,袁林果.全球定位系统(GPS):理论与实践[M].成都:西南交通大学出版社,2006. [2] 张九宴.GPS差分协议及基准站算法研究[D].武汉:武汉大学,2003. [3] 关惠平.GPS相对定位原理与DGPS技术简介[J].兰州铁道学院学报(自然科学版),2003,22 (6): 59-64. [4] 王永生.实时位置差分GPS的设计与实现[J].西北工业大学学报,1994,12 (3): 354-359. [5] STEMPFHUBER W, BUCHHOLZ M.A precise, low-cost RTK GNSS system for uav applications[J]. Conference on Unmanned Aerial Vehicle in Geomatics,2011(4): 34-39. [6] STEMPFHUBER W, BUCHHLOZ M.High-End and Low-Cost RTK GNSS in Machine Controland Precision Farming Applications[J].Bridging the Gap between Cultures,2011(3): 12-21. [7] 陈立春.关于EBEE RTK无人机在大比例尺地形图测绘中的研究与应用[J].城市地理,2015(18): 38-39. [8] 马怀武,王俊强.RTK结合无人机低空摄影在高原地区测绘中的应用[J].测绘地理信息,2014(3): 23-26. [9] 晏磊,吕书强.无人机航空遥感系统关键技术研究[J].武汉大学学报(工学版),2004,37(6): 67-70. [10] 洪宇,龚建华,胡社荣,等.无人机遥感影像获取及后续处理探讨[J].遥感技术与应用,2008,23(4): 462-466. [11] 张祖勋. 从数字摄影测量工作站( DPW)到数字摄影测量网格( DPGrid)[J].武汉大学学报( 信息科学版),2007,32(7):565-573. [12] 何敬,李永树,鲁恒,等. 无人机影像的质量评定及几何处理研究[J].测绘通报,2010(4):22-24. [13] 洪宇,龚建华,胡社荣,等. 无人机遥感影像获取及后续处理探讨[J].遥感技术与应用, 2008,23(4):462-466. [14] 崔红霞,林宗坚,孙杰. 大重叠度无人机遥感影像的三维建模方法研究[J]. 测绘科学, 2005,30 (2):37-39. [15] 王聪华. 无人飞行器低空遥感影像数据处理方法[D].青岛:山东科技大学,2006. [责任编辑:张德福] The use of differential GNSS to obtain high-precision UAV image line of exterior orientation elements ZHANG Kunpeng,YU Guangrui,GU Guangjie (Troops 61206,Dalian 116023,China) At present, a miniature UAV remote sensing system of low positioning accuracy needs a large number of ground control points, in order to meet the three empty and the mapping accuracy requirement.In order to improve the post processing efficiency of UAV remote sensing image system, this paper studies the use of differential GNSS module, combined with the difference algorithm to improve the accuracy of POS data. The calibration of position ard the camera time delay correction method of key technology can obtain the position information of high precision camera exposure time. So a set of integrated differential GNSS is formed based on UAV remote sensing system. Through the experiment, a small number of ground control points are used to obtain the high accuracy UAV image line elements, which can improve the efficiency of image processing. UAV; differential GNSS; position calibration; camera delay correction; aerial triangulation 著录:张坤鹏,于广瑞,顾广杰.利用差分GNSS获取高精度无人机影像外方位线元素[J].测绘工程,2017,26(7):5-11. 10.19349/j.cnki.issn1006-7949.2017.07.002 2016-11-20 张坤鹏(1978-),男,工程师. P228 A 1006-7949(2017)07-0005-07
3 差分系统的精度分析

4 差分GNSS在测绘中的应用
5 结束语



