许明辉 陈贻凯 杨明翰
(1.国网江西省电力有限公司柘林水电厂 2.国网新源白山发电厂 3.华电福新周宁抽水蓄能有限公司)
0 引言
传统控制是基于模型的控制,随着被控对象的复杂化,越来越难以用精确的数学模型来描述高度的非线性、强噪声干扰、复杂的信息结构,分散的传感元件与执行元件,分层和分散的决策机构以及动态突变性等。面对这些复杂对象的控制问题,人们开创性地将人工智能应用到了控制理论之中,提出了智能控制理论。该理论是对计算机科学、人工智能、知识工程模式识别系统论、信息论、控制论、模糊集合论、人工神经网络、进化论等诸多科学技术与方法的高度集成,对于解决水力发电厂计算机控制系统中存在的问题具有十分重要的意义[1]。
1 智能控制技术的应用优势
作为微电子工业和机械工业未来主要发展方向,智能计算机控制现已成为未来机械设备生产中重要的研究内容。将其与传统的自动化控制系统相比较,智能控制技术现已成为计算机控制系统中的核心内容,其自身具备人性化、智能化的特点。智能控制技术的应用可以完善机电系统的性能,同时还可以完善智能控制系统在内外部环境作业的需求,也可以按照指令和外部影响因素的变化对内部运行作出改变,此过程可以减少消耗的时间和成本,同时还可以促使机电系统更为完善,最终提升设备的整体性能[2]。
在智能控制技术应用方面,机电系统在应用此项技术后可以提高整体运行效率,此时可以将此类技术进行深层次的应用,以此保障机械设备便于操作,此过程也需针对命令编码,后续对编程项目作出完善,此时在人工操作支持下可以有效完成后续工作流程,以此优化计算机控制的质量[3]。
2 智能控制在计算机控制系统中的应用分析
2.1 模糊控制系统
模糊集合和模糊逻辑是模糊控制的重要基础,模糊集合需要按照区间的形式进行计算,在模糊集合方面可以划分为连续域和离散域。模糊集合需要明确模糊支集、交叉点、模糊单点等因素。模糊集运算的基本定律主要划分为并、交、补运算三种形式。其中模糊关系主要指的是集合论的概念,在不同的集合中因素的关联程度存在一定的差异,模糊关系无法用数学方法和简单的逻辑对其作出描述,在模糊集合中模糊关系是较为核心的内容,此时需要重视模糊关系的定义。模糊关系模糊矩阵如下所示:
针对上述内容对模糊控制系统进行设置,此时需要明确模糊控制系统的分类方法,具体分类如下:
(1)如果按照信号对时变特性作出分类,此时在信号变化过程中可以结合不同的特性进行分析,以此明确模糊控制系统的恒值模糊和随动模糊。
(2)按照模糊控制的线性作出分析,此过程需要对开环模糊控制系统作出分析,以此明确变量和输出变量,再针对任意差进行输出,从而定义线性度,此时也需对模糊控制系统的线性化程度作出衡量分析,分析出模糊子集的个数,按照个数定义模糊系统的线性特征,主要分为线性模糊系统和非线性模糊系统[4]。
(3)按照静态误差对其作出分类划分,主要分析静态误差是否存在,从而将模糊控制系统划分为有静态误差和无静态误差的系统。
(4)按照系统输入变量的分类作出分析,可以将输入个数划分为单变量模糊系统,也可以将其划分为多变量模糊控制系统。
在系统分类明确后也需明确模糊控制器,模糊控制器是模糊控制系统的核心内容,模糊控制器组成示意图如图1所示。

图1 模糊控制器组成示意图
2.2 神经网络智能控制应用
基于神经网络的智能控制可以称之为神经控制,主要进行人脑模拟思维和神经推理,以此形成神经计算模型。其中神经元的构成由神经网络最小单元和细胞水平作出智能模拟。神经元模型、神经网络模型和学习算法构成了神经网络。
人工神经元与生物神经网络相比复杂性更高,并且也具有一定相似度,生物神经元较为抽象,其中包含连接权、求和单元、激发函数、阈值等多个要素,人工神经元模型图如图2所示。
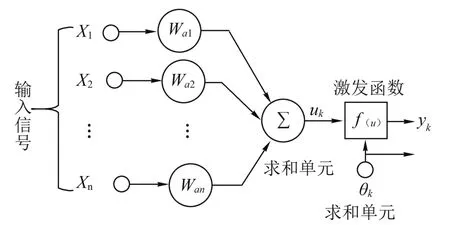
图2 人工神经元模型图
其中,连接权在人工神经网络中类似于衔接装置,衔接强度方面需要以此为表征,在功能上和生物神经元相似,连接权的权值具有较为明显的意义,处于正值状态下说明激发了人工神经元,处于负值时说明人工神经元被抑制。
针对求和单元方面,人工神经网络求和单元的基本功能是对信号和加权作出求取,在加权方面本质是一种线性组合内容。
针对激发函数方面,在人工神经网络中,其作用在于完成非线性映射,同时还需限制神经元的输出幅度,确保整体在统一的标准范围内。人工神经元中的激发函数形式较多,可以划分为阶跃型、线性型、S型、径向基函数型四种形式。
针对阈值方面,阈值的主要作用是激发函数图形的移动,还可以对各类问题作出解决,以此减少偏差的存在概率。
在神经控制系统方面需要明确多种情况,此时在设计工具选择方面需要选择Matlab对其作出设置。在实际应用过程中需要接受控制对象的控制需要,同时还需按照基本原理对各类控制结构作出完善,以此设计出神经控制系统[5]。针对当前的设计情况可以看出神经控制系统主要包括以下内容:首先需要明确受控制对象的数学计算模型和相关知识表示模型;其次需要对神经网络控制器的结构和功能作出划分;再次需要对神经网络算法作出初步判断;最后需要进行仿真实验操作,以此对设计结果和设计的不足之处作出改进。
2.3 图像智能识别算法的应用
视频监控分析是利用机器视觉技术对视频中特定的内容信息进行快速检索、查询、分析的技术。由于水电站工业电视摄像头的广泛应用,其产生的视频数据已是一个天文数字,此数据蕴藏的价值巨大,靠人工根本无法统计,而机器视觉技术的逐步成熟,使得视频分析成为可能。
在完整的人工智能算法运行下,可通过图像特征对比完成识别。基于人工智能算法的图像识别类似于大脑识别过程,两者最大的差异在于技术算法仅可模仿人的思维与行为。图像识别技术在应用过程中与大脑相比,人工智能算法对图像的提取识别具有不稳定性,继而影响识别精度。因此,为提升图像识别时效,需通过训练与学习不断优化人工智能算法,逐渐缩小图像识别误差,通过这项技术能够实现对设备出现的故障进行检测并在短时间内定位到故障环节,还可全方位监控机电设备的运行状况,只要发生问题便能实时响应反馈到客户端,确保系统的安全稳定运行。还能对发生的实时问题进行分析和处理,通过大数据的采集和统计对问题进行归类和汇总,保障水电站机电设备自动化作业[6]。
2.4 专家系统与仿真智能系统的应用
在智能控制领域中,专家控制系统是较为典型的知识工程系统。随着我国人工智能科学得到快速发展,专家控制系统得到了控制工程领域的重视,并且现已被广泛应用在智能控制领域之中。专家控制系统最早被国外专家研制,并且受到了高度重视,在专业领域方面组织专业人员对其开展研究,同时获得了较为丰硕的成果。随着计算机领域的不断发展,专家控制系统的开发作出了不断突破,现已服务于各个领域。站在原理的角度作出分析,每个学科专家控制系统都需大量专业知识的支持,后续还需借助人工智能技术,不断提高自身适应能力,模仿人们对问题作出推断,从而获得较为良好的决策结果,最终解决行业内的复杂问题。因此,知识和经验是专家系统的关键,但是专家系统并不能与计算机进行等同,在待解决问题方面需要采取协助解决的方案,而不是精确解决问题的方案。专家系统结构示意图如图3所示。

图3 专家系统结构示意图
专家系统在运行过程中主要划分为知识基系统、数值算法库、人机接口三个子过程。为了确保三个子过程可以有效运行,需要明确出口、入口、应答、解释、定时器等多个环节的支持。
针对仿真智能控制方面,需要有效模仿人的思维和意识,以此形成现代控制技术,此类技术的发展主要目的是为了对后续工作作出研究和改进,促使智能水平的提升。针对计算机领域,人工智能的路径呈现出多样化的特征,此时需要明确模拟人的意识结构,再模拟人的意识行为原则。针对上述思想对仿真智能系统进行设计,促使系统可以进一步模拟人的行为。此类仿真智能控制需要应用在被控对象上,所以需要明确控制器,促使其过程更为智能化。针对当前实际情况作出分析,可以看出仿真智能控制需要按照下述几个步骤进行相关操作:首先需要明确特征模型;其次对特征作出辨识;再次保证特征具有记忆;最后明确控制模态和决策模态。仿真智能控制器的结构示意图如图4所示。

图4 仿真智能控制器的结构示意图
3 我国水电智能控制系统应用发展前景
我国水电建设和水电技术得到快速发展,其中特大型水轮发电机组和相关辅助设备的研究取得了较大的进展,在研发过程中整体走向更加倾向于智能化。
在我国现有水电站计算机控制系统构建方面,需要有效分析各类智能控制技术需要发挥出的配套作用,同时通过人工智能结合各专业的智能化发展。例如,在7月7日举办的华为开发者大会2023(Cloud)上,华为云正式发布盘古大模型3.0(一个完全面向行业提供服务,以行业需求为基础设计的大模型体系,包括5+N+X三层架构)[7],在智能控制系统方面将发挥出其强大的功能性与优越性,并且随着人工智能和大数据算力方面的不断提升,可以替代人工进行智能诊断研判,优化系统的控制模型,改善整个控制过程,保障经济与社会效益。将人工智能技术与水力发电厂自动化控制领域深层次有效融合是未来的发展走势[8]。
4 结束语
综上所述,智能控制技术在水力发电厂计算机控制系统中的应用可以提高其运维和研判的精准性,能在优化资源配置的同时提高生产安全指数。利用人工智能技术,还可以全面优化机电设备的自动化控制系统,极大地提高其运维效率,简化检修步骤和流程,为水力发电企业的生产提供有力保障的同时保证经济收益和社会效益。



