李军娟,孙永再
(山西漳泽电力股份有限公司河津发电分公司,山西 河津 043300)
所谓的一次调频,是指当电网频率发生变化后,机组自动快速增减负荷,按其静态特性成比例地修正网频,即以较快速度承担电网负荷变化的调整。
1 原一次调频功能简介
河津电厂一期为三菱重工生产的两台350 MW燃煤机组。机组DCS系统采用了三菱公司提供的DIASYS-UP/V系统,MT-DEH系统是该系统的一个子系统。
1.1 CCS控制回路中一次调频功能
机组协调运行方式下,在负荷指令处理中心回路,经限幅、限速后的目标负荷指令叠加上一次调频指令,形成机组的负荷指令,以便直接在协调控制方式下,整个机组参与一次调频,其工作原理见图1。
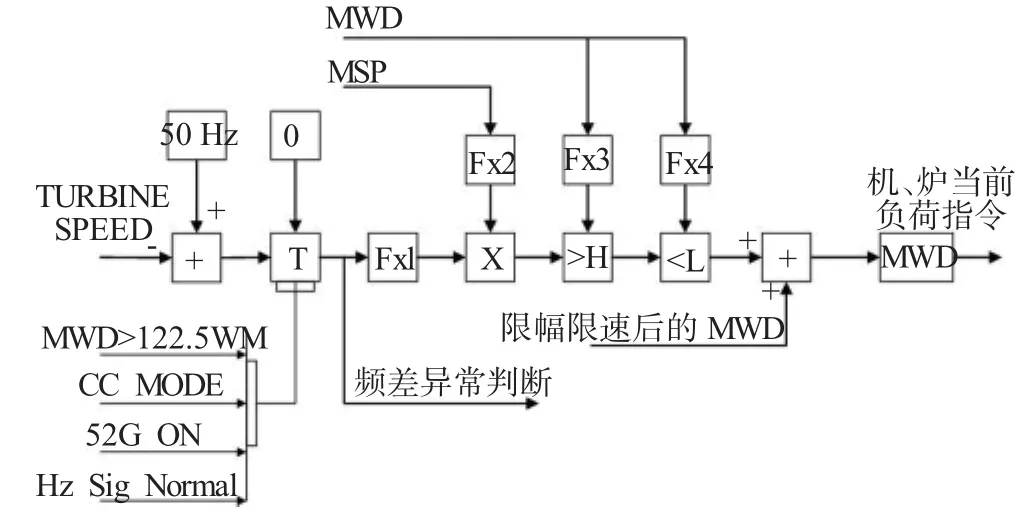
图1 工作原理图
由图可知:
(1)机组在协调方式下仅对50.2 Hz以上的网频异常进行一次调频响应,整个机组调频的不等率为4%。
(2)协调控制方式下机组对网频升高时一次调频的幅度受到限制,最大功率下为76 MW,额定负荷下为70 MW。
(3)频差过大(大于50.5 Hz)时,汽机主控退出自动方式,此时锅炉主控为自动方式,机组由协调方式转为炉跟随方式运行,CCS控制回路不再进行一次调频。
1.2 MT-DEH回路中一次调频功能
在功频电液调节系统中,设计了“GOV”和“LL”两种不同的负荷控制方式:其中,“GOV”是英文单词调速器“GOVernor”的缩写,是指机组并网后,在负荷控制指令中叠加调频指令,调频指令由速度变动率Droop回路算出,Droop回路所起的作用相当于机械式汽轮机调速系统中机械式转速反馈及控制回路,MT-DEH中速度变动率Droop回路原理图见图2。MT-DEH的转速不等率设计值为4%。
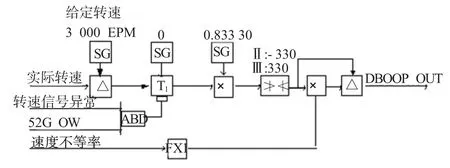
图2 回路原理图
“LL”是“Load Limiter”的缩写,LL回路没有叠加调频指令,也就是说,对电网频率的变化不响应;另外,LL回路中加入了负荷限制,对于LL回路的输出作出上限规定,防止机组超负荷。因此,LL回路被称为负荷限制器功率控制回路。
一般情况下,机组处于协调控制方式时,要求MT-DEH侧不对电网频率的小幅升高作出响应,一般投入LL控制方式,GOV回路则处于自动跟踪方式,其值为:LL指令+5%跟踪偏差+Droop指令。由于GOV/LL回路为选小输出,所以一般情况下,汽机主控指令通过LL回路直接操作汽机调阀,控制功率。当网频升高时,GOV指令(LL指令+5%+Droop指令)将逐渐减小,根据4%的汽机转速不等率设计,显然当网频大于下式计算值时,GOV指令将小于LL指令,发生翻转:
f=50+(3 000 rpm×4%×5%)/60=50.1 Hz
发生翻转后,汽机主控器增闭锁,机组实际处于不能增加负荷的协调控制方式。
2 存在的问题及改进方案
2.1 DEH中速度变动率Droop计算回路的改进
当DEH未投GOV方式时,速度变动率(Droop)按照原算法计算;当投入GOV方式时,速度变动率(Droop)按照图3的算法计算。速度变动率Droop按照省网200 MW以上火电机组的统一规定为4.5%。同时,取消手动修改“速度变动率”的功能。
图3中Fx1确定Droop函数关系。F3(x)和F4(x)确定Droop的可调负荷的上、下限幅,这种限幅应该是根据当前机组实发功率的大小而确定的,是一个相对值,这样做是符合实际情况的。如:当前实发功率是350 MW时,一次调频的上限调整幅度是0 ECR(0MW),而下限调整幅度是10%ECR(35 MW);当前实发功率是175 MW时,一次调频的上限调整幅度是10%ECR(35 MW),而下限调整幅度是0 ECR(0 MW)。
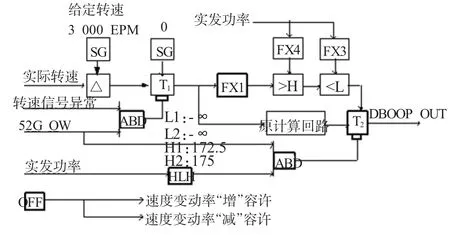
图3
2.2 DEH负荷控制方式的改进
DEH中,由于只有在GOV方式下机组才能参与一次调频,所以要求机组在合适的运行方式下投入GOV方式。根据三菱公司的设计思想:
(1)在机组冲转、定速、同期过程中,要精确控制汽轮机的转速,所以要采取“强制GOV”方式。
(2)在机组并网、带初负荷以及阀切换过程中,要精确控制汽轮机的功率和调门进汽方式,绝对不容许参与一次调频,因此要采取“LL”方式。在机组冲转、定速、同期、并网、带初负荷以及阀切换结束后,顺延了“LL”方式作为机组的负荷控制方式,而机组的“GOV”方式通过叠加5%的偏置自动跟踪“LL”方式。
这种设计思想基本是符合要求。因此,提出的改进方案是:
(1)当实发功率≥175 MW(AGC投入后的可调负荷下限)时,手动切换到GOV方式,投入一次调频功能。
(2)切换到GOV方式后,闭锁CRT上汽机主控的“GOV/LL”切换按钮和辅助控制盘上的“LL投入”硬手操,除非实发功率<175 MW,方可手动换成LL控制方式。
(3)当转差|△n|>4rpm时,闭锁汽机主控的升、降输出。
(4)GOV方式的输出上、下限幅由汽轮机的速度不等率确定,速度不等率由原来的4%改为4.5%。
2.3 CCS一次调频回路的改进
频差-负荷指令函数关系按照转速变动率Droop=4.5%,死区=±0.1 Hz修改。
2.4 CCS汽机主控的功率反调分析与处理
当转速差|Δn|>2 rpm时,DEH的GOV负荷控制回路按照4.5%的速度变动率参与一次调频,快速改变调门开度,增减负荷。同时,引起CCS汽机主控的负荷偏差相应变化,输出指令反方向改变,从而产生功率反调。克服功率反调的办法有:
(1)汽机主控设置的比列增益很小(0.3)。当转差|△n|<4 rpm,产生的功率反调作用与GOV功率调节的作用相比可以忽略不计。
(2)将CCS的一次调频死区与DEH的一次调频死区做成一样的(±2 rpm),使CCS与DEH同时、等幅、等速的发生作用。即DEH的GOV改变负荷的同时,CCS一次调频回路同时改变负荷指令,从而保证CCS汽机主控的负荷偏差维持调频前的数值不变,大大减小功率反调的作用。
(3)目前,DEH只设计了汽机主控的“升”负荷闭锁,即以下两种情况:
第一:GOV/LL发生翻转时。
第二:Droop GOV指令>IMP LL指令>机组最大容许输出功率时。
这两种“禁升”指令只能克服正转差时汽机主控发生的功率反调,而且不能克服负转差时汽机主控发生的功率反调。此修改方案为:当转差|△n|>4 rpm时,闭锁汽机主控的(升、降)输出,保持汽机主控输出指令不变,从而不会引起功率反调,保证DEH参与一次调频的快速和精确;同时禁止负荷指令中心手动改变负荷指令,禁止汽机主控手动改变输出指令,从而克服正、负转差时汽机主控发生的功率反调。
(4)当转差(频差)增大到:|Δn|>30 rpm(|Δf|>0.5 Hz)时,DEH的GOV回路动作同前,而CCS侧采取如下动作:将汽机主控切为手动,机组由CCS控制方式变为炉跟踪方式,汽机主控输出指令保持不变,不会引起功率反调。
禁止手动给定负荷指令,CCS自动取消一次调频功能。通过改进控制策略,可消除汽机主控产生的功率反调。
3 结论
在试验过程中,机组各主要参数变化幅度均不大,试验取得了成功,在对一次调频功能进行优化后,机组可以自动参与电网频率变化的调整,提高了机组的可靠性和经济效益,对电网的稳定运行起了重要作用。
[1]张玉铎,王满稼.热工自动控制系统.北京:水利电力出版社,1984.



