袁豪放,童燕,吴智名,徐飞
西安联飞智能装备研究院有限责任公司
本文基于某型直升机无人化改装的项目实践,梳理总结直升机无人化改装的技术难点,讨论在直升机总体改装过程中涉及的重要改装设计工作,并对比无人化改装的直升机地速保持飞行控制仿真结果和实际飞行测试结果,验证改装方案的合理性与正确性,对中大型直升机无人化改装具有一定的参考价值和借鉴意义。
近年来,无人直升机因其具有垂直起降、悬停、任务载荷重量大、机动性强等诸多显着优点,在国际范围内越来越受到广泛关注。
对于最大起飞重量大于500kg的中大型无人直升机研发的技术途径,国外过去20年的经验表明,采用成熟的直升机现货进行无人化改装是快速和有效的手段,可以有效解决无人直升机平台设计的问题,还可以缩短研制周期、降低研制风险。
直升机无人化改装难点
虽然采用成熟的直升机现货进行无人化改装是无人直升机研发的一条捷径,但在实际改装过程中仍存在许多技术难点。
原型机机载功能实现方式分析
由于原型机的控制是由驾驶员直接操作实现,因此首先需要解决无人直升机如何通过电控方式实现相同功能的问题。改装时需要根据原型机的相关资料以及直升机实物,对有人驾驶模式的机载系统功能、接口定义进行全面分析。
高可靠性机载系统研制
相比于小型直升机,中大型直升机具有更高的价值,并通常挂载昂贵的任务载荷设备,所以在进行无人化改装时,要求机载系统具有极高的可靠性。
无人直升机机载系统设计过程中,为防止某些关键系统故障导致核心功能的丧失,需要对这些关键系统进行冗余设计,以提高系统的可靠性,并通过非相似设计避免共模故障引起灾难性事故。
系统辨识和建模技术
直升机飞行动力学建模是无人直升机飞控系统研制的基础。由于直升机是一个多变量、强耦合、非线性的控制对象,精确的理论运动模型参数难以确定,通常采用系统辨识的方法获得直升机飞行动力学模型参数。
目前系统辨识技术可分为频域和时域两种,工程中一般采用频域的方法获得动力学模型参数,然后采用时域仿真对辨识模型进行验证。
频域辨识时首先根据原型机气动参数确定一个初始的直升机动力学模型,然后控制直升机进行一系列规定动作对直升机进行激励,最后将激励所产生的响应数据和初始动力学模型输入到直升机系统辨识算法,获得直升机动力学模型参数。
直升机振动的测量和规避
直升机发动机和旋翼旋转产生的振动频率低、振幅大,高振动水平将降低设备的工作性能,甚至导致设备非正常工作,例如低频振动与飞控系统的控制频带接近,容易造成飞控系统发散,而大振幅振动容易使导航系统失效,导致无人直升机失去姿态、位置信号,造成灾难性事故。
因此,必须采取有效的振动控制措施把设备振动水平控制在合适的范围,一般改装时需要对直升机关键系统进行机械减震和软件滤波,最大程度地减弱振动对系统的影响。
无人直升机总体改装
无人化改装的原型机是一架最大起飞重量为700kg、3桨叶、2座的直升机,旋翼直径7.2m,由一台最大功率106.7kW的“莱康明”O-360(Lycoming O-360)活塞发动机提供动力。
在原型机上,驾驶员根据对周围环境和飞行姿态的观察和判断,通过操纵杆和各种开关实现各机载系统和直升机运动的协同控制,但无人化改装的过程中,这些动作将全部由各种传感器、计算机和作动器所替代。
根据无人直升机的功能需求,对原型机的供电系统、发动机控制系统、机械结构、原型机重心、大气系统、导航系统、飞控系统、数据链路、任务载荷等结构和设备进行重新设计或改装。
机载设备设计和加装
为使无人直升机具备遥控控制、自动控制、导航定位和空地通信功能,拆除了原型机驾驶舱内的座椅、仪表盘、安全带和操纵杆系,从而减轻无人直升机空机重量,提高载重能力,并加装飞控系统、导航系统和数据链等机载设备。各机载设备安装位置如图1所示。
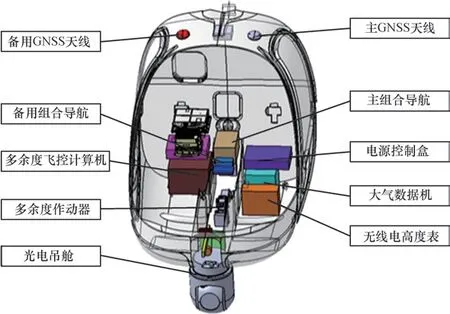
图1 机载设备安装示意图。
为提高无人直升机的安全性,关键机载设备如组合导航、飞控计算机、作动器等均采用非相似多余度设计,保证这些系统不会存在单点故障风险,同时无人直升机不会因为共模故障而丧失飞行控制功能。
供电系统设计和改装
如果说发动机是无人机的心脏,那幺电源系统就是无人机的血液,电源系统的可靠性对无人机至关重要。
在原型机的改装过程中,机载设备的总电功率增加较多,因此原配的发电机输出功率已不能满足要求。同时考虑到无人直升机的强振动环境和安全性要求,设计了冗余的供电系统架构,保证在发动机或发电机故障时,飞控和导航系统仍然能够控制作动器使无人直升机通过旋翼自转下滑软着陆,从而最大限度降低损失。改装后的供电系统如图2所示。
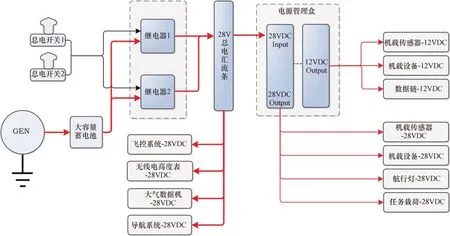
图2 供电系统改装结构示意。
重心位置分配
重心对直升机的稳定和安全飞行至关重要。由于改装需要拆除原型机自带的座椅、仪表、驾驶杆系等设备,安装很多机载设备,而且无驾驶员和乘客也会影响直升机原有的重心,因此在直升机无人化改装时直升机重心改变很大。
通过量化计算的方式对各个拆除和加装的部件进行分析,并通过实际测量确定改装后的重心位置,保证重心位置在总体设计要求的范围内。
改装前后平台重心计算结果如图3所示,其中蓝色框为最大重心理论值范围,紫色线为原型机在搭载驾驶员和乘客的情况下,随着燃油余量变化时的重心范围,红色线为改装后无人直升机随着燃油余量变化时的重心范围。由此看出,直升机改装后的重心较改装前向前移动了60~70mm,但仍然在最大重心理论值范围内,可以满足总体要求。

图3 改装前后平台重心范围对比。
飞行控制算法仿真与验证
使用频域辨识的方法获得原型机的动力学模型,然后在控制算法架构设计和参数仿真调试的基础上,在铁鸟台架上对机载设备软硬件进行综合测试,最后在实际飞行测试前期通过安装防滚架和系留绳,并逐步放松软件指令限制等方式,对飞行控制算法进行飞行验证。
以地速保持为例,外部环境为无风状态,无人直升机初始在悬停状态,随后切换到6m/s地速保持模态。在实际飞行测试过程中,无人直升机按地面站发出的地速指令进入地速保持模式,通过遥测数据记录实时地速数据。仿真结果和实际飞行测试效果对比见图4。
从图4对比结果看出,仿真数据和实测数据基本吻合,地速保持较平稳,但从控制效果来看,无人直升机的响应速度偏慢,原因是为了保证该机的安全,无人直升机控制律在调试阶段对控制频带限制得比较严格。当无人直升机测试结果足够稳定后,可以进一步放松控制频带和指令的限制,提高无人直升机的响应速度和性能。

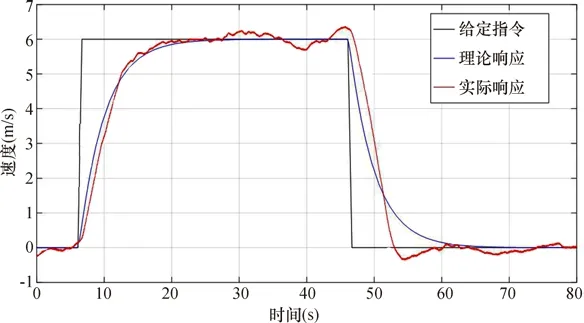
图4 地速保持功能仿真与飞行测试结果。
通过对直升机的机载设备、供电系统、重心分配和控制算法等进行改装设计,完成了无人化改装工作,并通过桌面仿真、铁鸟试验和飞行试验,验证了改装方案的合理性和正确性,对中大型直升机无人化改装具有一定参考价值和借鉴意义。



