刘 灿,孟志伟,孙 旻
新安县公路管理局,河南 洛阳 471800
全球定位系统(Global Positioning System)具有实时提供三维坐标的能力,因此在民用、商业、科学研究上也得到了广泛应用。它不仅具有全球性、全天候、连续的精密三维导航与定位能力,而且具有良好的抗干扰性和保密性。从静态定位到快速定位、动态定位,GPS技术已广泛应用于测绘工作中。 对于我们所熟知GPS,可以说它是测量史上的一次变革,它为我们提供了全天候、高精度、高效率的测量方法。但是GPS也有它自己的不足之处,比如说作业时间长、数据要进行内业处理等。RTK(Real Time kinematic)是GPS发展的最新成果,它弥补GPS原有的不足之处,它不仅具有GPS原有的全天候、高精度、无须光学通视的特点,而且还可以为测量提供实时的定位结果,可以说RTK的产生是GPS应用的拓展,是测量方法的又一次突破,是测量史上的又一次变革。本文以Trimble 5800为例,介绍了RTK技术在公路施工放样中的应用。
1 基站架设
RTK测量的关键是确定测量周期内,能否连续地、可靠地接收基准站播发的信号,是RTK能否成功的决定因素。在实际应用中,来自各方面的干扰,降低了RTK的可靠性和精度。研究表明,为了保证地物点的测量精度,我们在选点时要采取以下措施:
1)点位应设在易于安装接收机设备、视野开阔、视场内周围障碍物高度角应小于15°(如可以选在最高建筑物的顶楼);
2)点位应远离大功率无线电发射源(如电视台、微波站、微波通道等),其距离不小于200m,应远离高压电线,距离不小于50m;
3)点位附近不应有大面积的水域或强烈干扰卫星信号接收的物体;
4)点位选择要充分考虑到与其它测量手段联测和扩展;
5)点位要选在交通方便的地方,以提高工作效率;
6)点位要选在地面地基坚硬的地方,易于点的保存。
除此之外,为了保证地物点的测量精度,我们还要对接收机天线进行校验,选择有削弱多路径误差的各种技术的天线。同时,我们还要不断利用新的数据处理技术,以削弱各种误差带来的影响。
2 RTK的作业过程
2.1 启动基准站
将基准站架设在上空开阔、没有强电磁干扰、多路径误差影响小的控制点上,正确连接好各仪器电缆,打开各仪器。将基准站设置为动态测量模式。
2.2 建立新工程,定义坐标系统
新建一个工程,即新建一个文件夹,并在这个文件夹里设置好测量参数[如椭球参数、投影参数等]。这个文件夹中包括许多小文件,它们分别是测量的成果文件和各种参数设置文件,如*.dat、*.cot、*.rtk、*.ini 等。
2.3 点校正
CPS测量的为W CS一84系坐标,而我们通常需要的是在流动站上实时显示国家坐标系或地力独立坐标系下的坐标,这需要进行坐标系之间的转换,即点校正。点校正可以通过两种方式进行。
1)在已知转换参数的情况下。如果有当地坐标系统与W CS84坐标系统的转换七参数,则可以在测量控制器中直接输入,建立坐标转换关系。如果上作是在国家大地坐标系统下进行,而且知道椭球参数和投影方式以及基准点坐标,则可以直接定义坐标系统,建议在RTK测量中最好加入1~2个点校正,避免投影变形过大,提高数据可靠性。
2)在不知道转换参数的情况下。如果在局域坐标系统中工作或任何坐标系统进行测量和放样工作,可以直接采用点校正方式建立坐标转换方式,平面至少3个点,如果进行高程拟合则至少要有4个水准点参与点校正。
2.4 流动站开始测量
1)单点测量:在主菜单上选择“测量”图标打开,测量方式选择“RTK”,再选择“测量点”选项,即可进行单点测量。注意要在“固定解”状态下,才开始测量。单点测量观测时间的长短与跟踪的卫星数量、卫星图形精度、观测精度要求等有关。当“存储”功能键出现时,若满足要求则按“存储”键保存观测值,否则按“取消”放弃观测。
2)放样测量:在进行放样之前,根据需要“键入”放样的点、直线、曲线、DTM道路等各项放样数据。当初始化完成后,在主菜单上选择“测量”图标打开,测量方式选择“RTK”,再选择“放样”选项,即可进行放样测量作业。在作业时,在手薄控制器上显示箭头及目前位置到放样点的方位和水平距离,观测值只需根据箭头的指示放样。当流动站距离放样点就距离小于设定值时,手薄上显示同心圆和十字丝分别表示放样点位置和天线中心位置。当流动站天线整平后,十字丝与同心圆圆心重合时,这时可以按“测量”键对该放样点进行实测,并保存观测值。
3 RTK应用实例及精度分析
2010年新安县公路管理局承接了“洛阳市G310至吉利区新建工程一期”工程施工,以本工程路线某段曲线主点及细部点设计坐标:
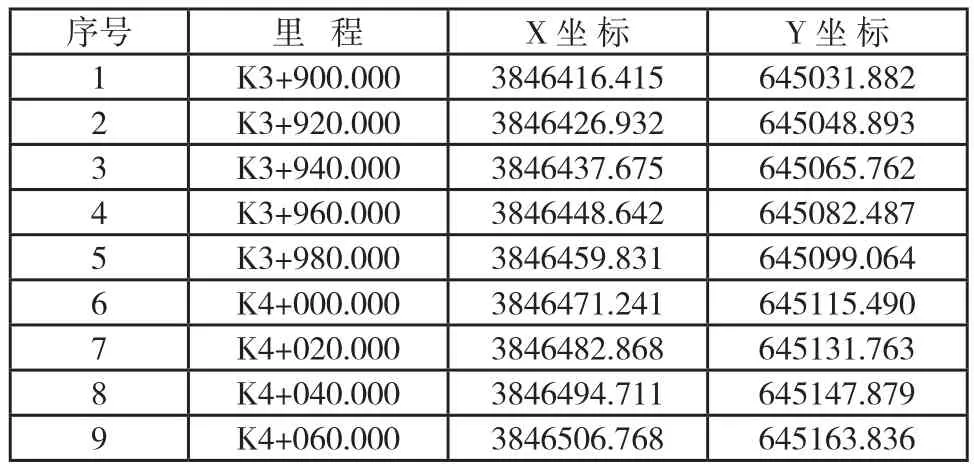
序号 里 程 X 坐 标 Y 坐 标1 K3+900.000 3846416.415 645031.8822 K3+920.000 3846426.932 645048.8933 K3+940.000 3846437.675 645065.7624 K3+960.000 3846448.642 645082.4875 K3+980.000 3846459.831 645099.0646 K4+000.000 3846471.241 645115.4907 K4+020.000 3846482.868 645131.7638 K4+040.000 3846494.711 645147.8799 K4+060.000 3846506.768 645163.836
如前述对该曲线进行放样,同样为检验放样点的精度,我们用全站仪对放样点进行测量,并将测量结果近似看做放样点真值,曲线点的全站仪放样坐标值和全RTK放样值的误差如下:
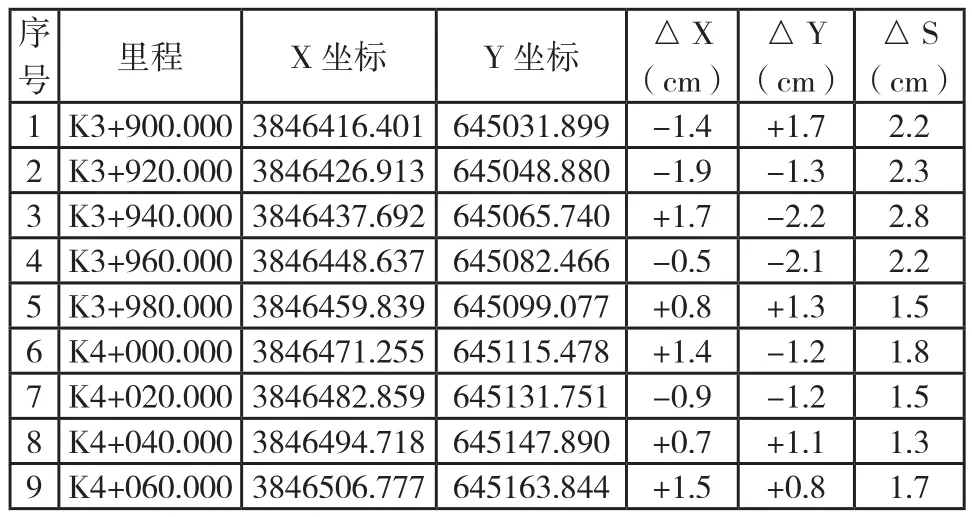
△S(cm)1 K3+900.0003846416.401 645031.899 -1.4 +1.7 2.22 K3+920.0003846426.913 645048.880 -1.9 -1.3 2.33 K3+940.0003846437.692 645065.740 +1.7 -2.2 2.84 K3+960.0003846448.637 645082.466 -0.5 -2.1 2.25 K3+980.0003846459.839 645099.077 +0.8 +1.3 1.56 K4+000.0003846471.255 645115.478 +1.4 -1.2 1.87 K4+020.0003846482.859 645131.751 -0.9 -1.2 1.58 K4+040.0003846494.718 645147.890 +0.7 +1.1 1.39 K4+060.0003846506.777 645163.844 +1.5 +0.8 1.7序号 里程 X 坐标 Y 坐标 △X(cm)△Y(cm)
得出了和点的放样一样的结论:
1)RTK测量结果与全站仪测量结果互差均在厘米级,其中横向最大误差△X为-1.9cm,纵向最大误差△Y为-2.2,点位互差最大为2.8cm ,最小为1.3cm;
2)若以全站仪测定的点位坐标为准,RTK放样点点位误差均在±5 c m以内,RTK放样点点位相对于全站仪测定点位中误差按公式计算,结果为2.0cm;
3)用RTK进行测设,曲线的横向和纵向偏差完全可以满足工程的要求,因其不存在误差累计,所以已比常规仪器测设的精度高;
4)如有误差超限的点,我们同样可以根据测量的条件,判断出误差的来源,对于放样点存在与市区的工程,误差多为“信号干扰误差”,对于接近水域的地区,则为“多路径误差”;
5)对于误差超限的点我们可以用静态GPS进行测量后,制作摸板,标出正确的点位,也可以用经纬仪和电子测距仪利用导线点进行测量,制作摸板,标出正确点位。
4 结论
实时动态RTK技术在公路勘测中的应用,对等级公路的勘测手段和作业方法产生了重大改变,极大地提高了勘测精度和勘测效率,对公路勘测、施工和后期养护、管理方面有着广阔的应用前景,为我国国民经济发展带来了可观的经济效益。



