李双才
(中铁武汉电气化局集团有限公司,湖北 武汉 430000)
0 引言
我国的铁路建设经过多年的发展,取得了较大的成就。城际铁路、高速铁路等铁路网在全国依次铺开。我国的城际铁路、高速铁路均采用电气化铁路牵引供电模式,牵引供电系统发生故障时,会导致机车失去动力电源、列车停运、乘客滞留,严重扰乱正常的行车计划。因此,电气化铁路的牵引供电系统必须提供优质、稳定、不间断的安全供电[1-3],是铁路正常运输保障的前提条件。城际铁路、高速铁路的牵引供电系统大多采用220kV 进线电源、全并联AT 牵引网的供电模式,所内变压器容量较大,只要发生接触网接地故障,就会产生很大的短路故障电流,一般达到普速铁路的2~3 倍,发热效率达到普速铁路的4~9 倍,较大地损伤与冲击变压器、断路器、接触网等一次设备,严重地损害一次设备的使用寿命。基于此,城际铁路、高速铁路等牵引供电系统需要更快的继电保护,尽量缩小故障停电范围。一旦发生接触网接地故障,为满足速动性,传统的继电保护方案为:首先,综合自动化系统将变电所的上、下行断路器跳闸;然后,分区所、AT 所通过失压保护解列供电臂,通过重合闸保护恢复非故障区段供电。因此,供电臂发生的任何故障,都会造成上、下行断路器同时跳闸,不仅扩大了停电范围,导致继电保护选择性差,而且增加了断路器动作次数,使一次设备遭受更多的电冲击,甚至会对设备造成永久性损伤。
综上所述,由于传统保护装置只能采集装置安装点的信息,仅具有单点保护功能,而各保护装置之间不能交互信息,使得传统继电保护方案造成上述不可克服的缺陷。基于IEC61850 标准协议的智能保护装置,可以直接通过GOOSE 信号,快速交互开关分合闸、保护闭锁或保护联跳等指令信息[4-5],从而使任意智能装置具有广域保护功能与控制功能。
本文针对牵引供电系统全并联AT 网的特点,提出利用既有牵引变电所、分区所、AT 所之间的广域通道,实现供电臂网络化保护与控制方案。只要发生接触网永久性故障,供电臂各装置之间直接通过GOOSE信号,交互开关分合闸、保护闭锁或保护联跳等指令信息,快速退出故障区段,恢复非故障区间供电,缩小停电范围,在保证继电保护速动性的同时,满足了保护的选择性[6]。
1 传统的馈线保护不足
因此,图1 所示的供电臂接触网发生故障时,传统的馈线保护装置保护1QF、2QF 断路器同时跳闸,停止对上、下行接触网供电,整个供电臂失压。同时,同一供电臂的分区所与AT 所综合自动化系统检测发现自耦变压器从有压变为无压,综合自动化系统会分别跳开断路器3QF、4QF、5QF 和6QF。然后,1QF、2QF断路器重合闸启动。假设图1 所示K 处所在的下行线路发生永久性接触网故障,1QF 断路器重合闸失败,由于上行线路没有故障,2QF 断路器重合闸成功,恢复对非故障的上行线路供电。最后,分区所与AT所内的AT2 与AT4 自耦变压器检测接触网有压,分别合闸4QF 与6QF 断路器,自耦变压器投入正常工作。
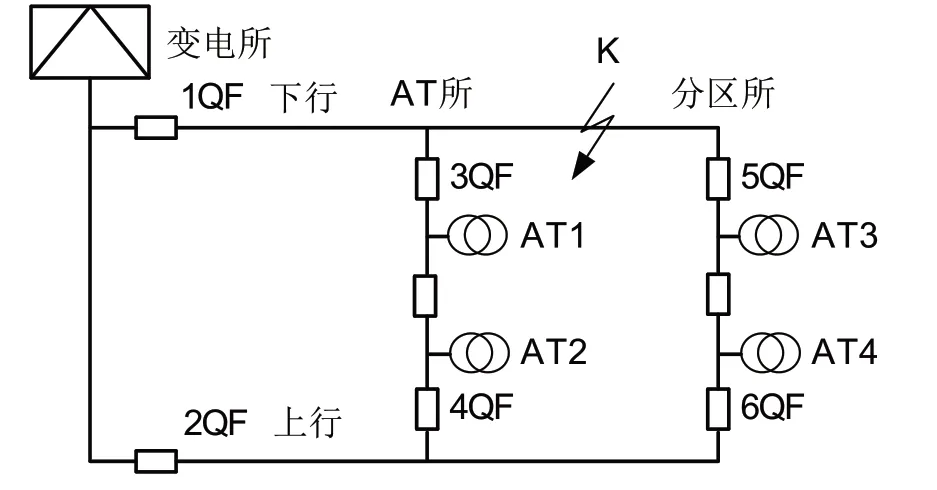
图1 全并联AT 供电方式供电臂示意图
综上所述,传统继电保护功能存在的缺陷与不足如下。
1.1 保护选择性不足
接触网发生故障时,变电所继电保护会同时跳闸供电臂上、下行断路器,分区所与AT 所继电保护会因接触网失压跳闸,导致整个供电臂停电。选择性不足造成的后果是:非故障区段的一次设备承受不必要的电冲击,断路器动作次数增加,减少了使用寿命;非故障区段随故障区段同时跳闸,造成停电范围扩大。
1.2 保护速动性不足
接触网发生故障时,传统继电保护是通过设置不同的保护定值和时限定值配合实现选择性,使得保护动作时间处于100~1000ms 之间,延长了保护时限,牺牲了速动性能,严重时还会烧损乃至烧断断路器、变压器、避雷器等一次设备与接触网,使瞬时性故障演变成永久性故障。
1.3 断路器动作频繁、不断冲击一次设备
经过上述分析,一旦图1 所示的K 处发生永久性故障,会造成1QF 断路器2 次跳闸,1 次重合闸;2QF断 路1 次 跳 闸,1 次 重 合 闸;3QF 与5QF 断 路 器 各1 次跳闸;4QF 与6QF 断路器各1 次跳闸、1 次合闸。故障所在的供电臂所有断路器一共动作11 次,短时间内断路器动作频繁,不断冲击所内一次设备。
2 基于GOOSE 的供电臂网络化保护与控制功能研究
广域保护系统是基于综合自动化系统发展的新一代继电保护产品,系统分别在同一供电臂的变电所、分区所、AT 所内设置智能保护装置,所间智能保护装置采用图2 所示的通信结构,各装置使用最新的IEC61850 标准协议,通过图2 所示的广域通道,利用GOOSE 和SV 交 互 信 息。

图2 广域级智能保护装置通信结构示意图
为了较好地区分故障区段与非故障区段,在判据中引入电流方向。将变电所所内由母线流向线路的保护电流方向定义为正方向,由线路流向母线的则定义为负方向,分区所、AT 所电流方向定义与此相同。接触网故障时,只有电流正方向启动的保护才允许出口,电流负方向启动的保护不允许出口,且通过广域通道向同一供电臂的变电所智能保护装置发出保护闭锁GOOSE 信号。图1K 处发生接触网故障时,断路器1QF、2QF、3QF、5QF 的保护电流从母线流向线路,电流方向为正;断路器4QF、6QF 的保护电流从线路流向母线,电流方向为负。断路器1QF、3QF、5QF 保护电流为正方向,保护允许出口,断路器跳闸;断路器4QF、6QF 的保护电流为负方向,保护不允许出口,且向同一区段(上行线)断路器2QF 的保护装置发送保护闭锁GOOSE 信号;断路器2QF 的保护装置收到同一区间其他装置发送的保护闭锁GOOSE 信号,尽管保护电流为正,同样闭锁保护出口。因此,K 处发生故障时,下行线路所有断路器跳闸,停止供电,上行线所有断路器不动作,正常运营。
下行线退出运行后,为了进一步缩小故障停电范围,恢复非故障区段的供电,广域保护装置采用自愈重构技术,将供电臂区段划分为L11、L12、L21 及L22四个区间,如图3 所示的典型供电臂接线图。当某个区间接触网发生故障时,通过GOOSE 发出分合闸命令,断开KT1 或KT2 开关,合闸相应断路器,恢复非故障区间的供电,仅停止故障区间的供电。
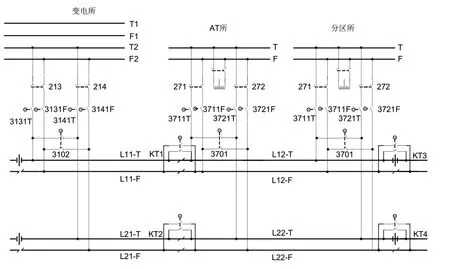
图3 AT 供电方式典型供电臂接线图
一旦图3 中的L12 区段(图1 中的K 处)接触网发生永久性故障,同一供电臂的各智能保护装置会同时跳开变电所213 断路器、分区所与AT 所的271 断路器,变电所213 断路器重合闸失败,变电所内的智能保护装置通过电流方向及GOOSE 信号,定位故障所在区段,启动如下自动控制程序:
第一,变电所内的广域保护测控装置通过所间广域通道给AT 所内的广域保护测控装置发送命令,分KT1 开关。第二,变电所内的广域保护测控装置合213 断路器,使非故障的L11 区段恢复供电。
一旦图3 中的L11 区段接触网发生永久性故障,变电所内的广域保护测控装置通过电流方向及GOOSE 信号,定位故障所在区段,启动如下自动控制程序:第一,变电所内的广域保护测控装置通过所间广域通道给AT 所内的广域保护测控装置发送命令,分KT1 开关。第二,变电所内的广域保护测控装置通过所间广域通道给AT 所内的广域保护测控装置发送命令,合271 断路器。第三,变电所内的广域保护测控装置通过所间广域通道给分区所内的广域保护测控装置发送命令,合271 断路器,使L12 区段恢复供电。
综上所述,基于GOOSE 的供电臂网络化保护与控制功能,同时保证了保护的选择性与速动性。与传统继电保护相比,同一条供电臂内所有断路器仅动作6次,减少了45%的断路器动作次数,降低了因断路器动作次数增加对一次设备电冲击的影响;同时缩小了故障停电范围,使停电范围缩小至传统保护的50%。由于装置之间能够通过发送GOOSE 信号,闭锁同一区段其他装置的保护出口,各保护装置的后备保护同时启动,使保护动作时限不大于20ms,实现全速动的保护功能,快速切除故障线路,将接触网与变压器的电冲击影响降至最低,同时不影响非故障区段的正常运营,减少停电范围。
3 动态模拟实验验证
为了验证本文所提方案的正确性与有效性,于2021 年6 月28 日在西南交通大学动模实验室,通过在实时数字仿真系统(RTDS)设置各种运行工况及故障状态,进行了动态模拟试验。
模拟供电臂L12 近分区所区段发生永久性T 线故障,同一供电臂内的变电所、分区所与AT 所广域保护测控装置及断路器动作情况如下:
第一,变电所213 断路器供电臂正向阻抗保护、过电流保护、距离I 段保护出口,213 断路器跳闸,同时向同一区段的其他智能保护装置发出供电臂联跳GOOSE 信号;第二,变电所214 断路器智能保护装置收到同一区段其他装置发出的保护闭锁GOOSE 信号,所有保护功能不允许出口,均处于闭锁状态;第三,分区所271 断路器智能保护装置收到变电所213保护装置发出的供电臂联跳GOOSE 信号,供电臂联跳保护出口动作,同时供电臂正向阻抗保护元件动作出口,分区所271 断路器保护跳闸;第四,分区所272断路器智能保护装置检测该断路器的保护电流从线路流向母线,为负方向,闭锁该装置所有保护,同时生成保护闭锁的GOOSE 信号,并将该信号发送给同区段的变电所214 断路器保护装置;第五,由于故障点位于分区所近端,远离AT 所,AT 所271 断路器所有保护功能均未能启动,但271 断路器保护装置收到变电所保护装置发出的供电臂联跳GOOSE 信号,AT 所271 断路器保护装置的供电臂联跳保护动作,271 断路器出口跳闸;第六,AT 所272 断路器智能保护装置检测该断路器的保护电流从线路流向母线,为负方向,闭锁该装置所有保护,同时生成保护闭锁的GOOSE信号,并将该信号发送给同区段的变电所214 断路器保护装置;第七,变电所智能保护装置启动自动控制功能,同时通过测距计算,识别出故障区间为L12;第八,变电所智能保护装置根据判断出的故障区间,选择对应的自愈方案;第九,变电所智能保护装置通过广域通道,给同一区间内的AT 所智能保护装置发送KT1 开关分闸GOOSE 指令;第十,AT 所的智能装置收到GOOSE 指令后,分开KT1 开关,分闸成功后向变电所广域保护测控装置发送分闸成功的GOOSE 信号;第十一,变电所广域保护测控装置收到分闸KT1开关成功的GOOSE 信号后,合闸213 断路器,L11 区间恢复供电,将L12 故障区间隔离。
4 结语
本文基于同一供电臂内的所间广域通道与广域保护测控装置,利用装置之间的GOOSE 联跳信号与闭锁信号,研究了全并联AT 供电方式下的供电臂网络化保护与控制功能。当牵引网发生接触网故障时,供电臂相关装置的保护功能启动,同时发出GOOSE联跳信号或闭锁信号。变电所保护装置在保护启动后,如果未收到保护闭锁信号,则保护出口,同时给同区段的AT 所与分区所保护装置发送保护联跳信号;变电所保护装置收到保护闭锁信号,闭锁保护,不出口;分区所与AT 所内的智能保护装置定位故障区段,给同一区段非故障线路的变电所保护装置发送保护闭锁信号;智能保护装置一旦收到联跳保护信号,动作出口,快速退出故障线路,保证非故障线路正常供电,在确保保护速动性的同时满足保护的选择性。相比传统保护,供电臂所有断路器动作次数减少了45%,停电范围缩小了50%。方法的有效性与正确性得到了动态模拟试验结果验证,具有重要的理论意义与应用价值。



