张月新,牛燕雄
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
0 引 言
激光多普勒测速仪是基于多普勒效应的自主速度测量仪器,具有非接触测量、实时性好、精度高、系统结构简单等特点,被广泛应用于航空航天、流体力学、空间动力学、医疗检测仪器等方面[1-4]。
随着工程应用对测速性能要求的不断提高,对激光多普勒测速系统可见度提出了更高的要求。然而基于相干探测的激光多普勒测速系统存在偏振衰落现象降低干涉信号强度,从而使系统的可见度大大降低。因此,设计有效的消偏振衰落方案对提高激光多普勒测速系统的性能至关重要。文献[5-6]提出了通过偏振控制器调整输入光偏振态,以获得最优并稳定可见度的技术,但它不满足LDV对偏振态的实时性要求;文献[7]通过在Michelson光纤干涉仪上加两个法拉第旋转镜来提高输出条纹可见度,验证了旋转角度在45°附近时,消偏振衰落效果最佳,但它不适用于Mach-Zehnder干涉仪;文献[8]提出结合偏振分集接收技术和基于反正切计算的相位生成载波解调技术消除干涉型光纤传感器的偏振衰落问题,但其解调算法复杂,不便于LDV工程应用;文献[9]给出了偏振分集器的工作原理,理论分析并验证了夹角90°的两态偏振分集器可有效消除偏振衰落现象,然而上述文献并未提出适用于激光多普勒测速系统的消偏振衰落方案。
本文对激光多普勒测速系统的消偏振衰落方案进行了研究,利用激光多普勒测速系统的工作原理分析了偏振衰落的来源,建立了偏振态的两个参量与信号可见度之间的数学模型,数值模拟研究了偏振衰落对系统可见度的影响,并对基于三态分集接收的消偏振衰落方案进行了理论分析和实验验证。
1 偏振衰落产生的机理
偏振衰落(Polarization Induced Fading,PIF)是一种光在相干探测系统中传输时其偏振态随机变化,从而导致输出信号强度减小,干涉条纹可见度下降的现象。
基于相干探测的激光多普勒测速系统原理框图如图1所示。窄线宽激光器产生单频线偏振激光,该输入光经耦合器1分为信号光和本振光,与耦合器2共同组成Mach-Zehnder干涉仪。信号光经环形器和准直器输出,打到移动目标后产生多普勒频移并返回,准直器接收返回信号光;本振光由耦合器2输出。光电探测器探测返回信号光和本振光产生的拍频信号,利用数据采集卡对输出电压信号进行采集,通过频率提取算法提取出多普勒频移值,经过运算即可求出目标的移动速度。
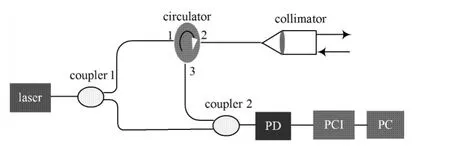
图1 激光多普勒测速系统原理框图
相干探测激光多普勒测速系统中只有当两束相干光的偏振态方向一致时,干涉效果最佳,偏振态方向正交则不发生干涉。但是一方面由于该系统采用普通单模光纤,光纤截面几何形状的畸变、光纤内部残余应力、环境温度、光纤弯曲等都会使单模光纤产生双折射效应,使得光纤中偏振态随机变化;另一方面,激光多普勒测速系统探测的目标为粗糙表面,信号光照射到表面时,因为表面材质、粗糙度、入射角及多重散射的影响,使得返回信号光的偏振态随机变化。
2 偏振衰落的影响
由于激光多普勒测速系统中光的偏振态是任意的,可以假设信号臂和参考臂的电场矢量是方位角和椭率角为 θs,εs和 θr,εr的椭圆偏振态,其琼斯矢量为:
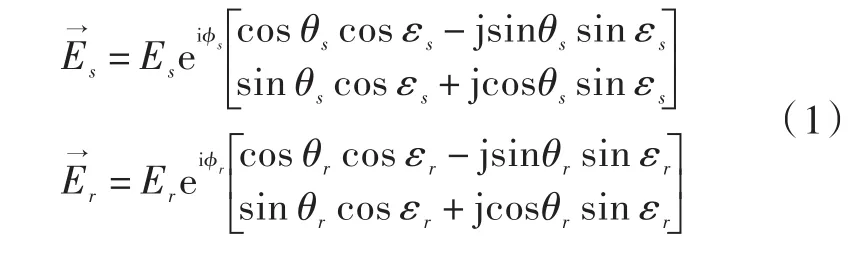
式中:Es和Er分别为的振幅,φs和φr分别为信号光和参考光的相位。
光电探测器输出的电信号可以表示为:
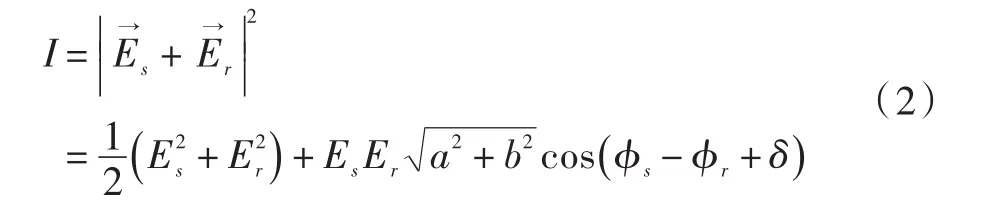
式中:a=cos(θs-θr) cos(εs-εr);b=sin(θs- θr) sin(εs+εr);附加相位差 δ=arctan(b a)。
为了定量表示两光束干涉时出现的部分相干或者不相干的情形,Michelson最早用可见度描述干涉条纹的优劣,它的定义[10]为。激光多普勒测速系统输出信号的可见度为:

式(3)表明,可见度V取决于信号光和参考光的方位角θ和椭率角ε,其值为零时,表示干涉信号将彻底消 失 ,有 三 种 状 态 可 使cos(θs-θr) cos(εs-εr) 和sin(θs-θr) sin(εs+εr)同时为零,如表1所示。而其他状态时,可见度V在0~1之间,所要检测的信号幅值随两光束偏振态而变化,虽然能检测到干涉现象,但是信号不稳定,影响测量结果。

表1 PIF状态
假定信号光和参考光都为线偏振光(εs=εr=0°),则V= | cos(θs-θr) |。可见度V取决于参数 θs和 θr,假设θs和 θr在 [- π2π2]上随机分布,可以得到系统的可见度分布,如图2所示。
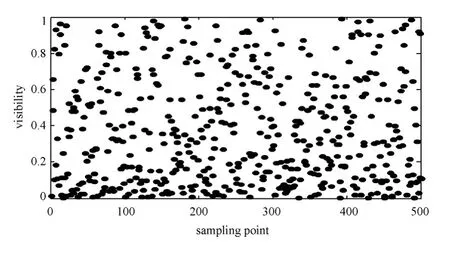
图2 激光多普勒测速系统的可见度分布图
由图2可知,系统可见度随机的分布在0~1之间,可接近于零,偏振衰落会大大降低系统的探测性能,例如,可见度小于0.30的概率是0.42,可见度大于0.70的概率只有0.19,因此有必要研究消偏振衰落方案。
3 偏振分集接收技术
3.1 基本原理
偏 振 分 集 接 收(Polarization Diversity Receiver,PDR)通过在接收端采用不同夹角的检偏器对信号进行检偏以消除被检信号的偏振衰落问题。采用三态PDR的激光多普勒测速系统原理框图如图3所示。
耦合器2输出的信号光和本振光经互成60°夹角的三个检偏器分成三路信号,分别由三个光电探测器接收。光电探测器探测返回信号光和本振光产生的拍频信号,利用数据采集卡对三个输出电压信号进行采集,这样总能从其中一个拾取到可见度不为零的一个信号,完全消除偏振衰落现象。
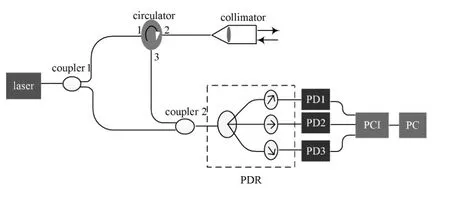
图3 采用三态PDR的激光多普勒测速系统原理框图
3.2 模型及仿真
如果信号光和参考光通过一个与慢轴成θ角的偏振器,输出信号光强度则表示为:
假定信号光和参考光都为线偏振光(εs=εr=0°),则:

从式(6)可以看出,可见度随参数 θs,θr及 θ变化,变化范围是0到1。对于采用三态PDR的激光多普勒测速系统,可得到θ分别为0,π3和2π3的三个信号。令 θs和 θr分别在 [- π2π2]上随机分布,得到三路信号的可见度分布图如图4所示。
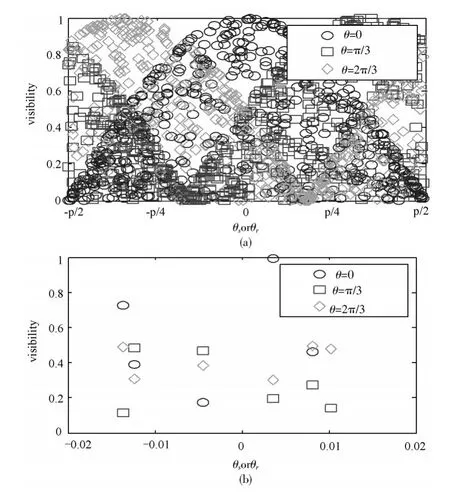
图4 三路信号的可见度分布图
如图4(a)所示,由于偏振衰落,可见度会衰减至0,但是对于一个固定的θs或θr,三个探测器的可见度不会同时接近于0,图4(b)表示的更清晰。选择三路信号中可见度最大的一路作为系统的输出信号,则系统的可见度分布如图5所示。
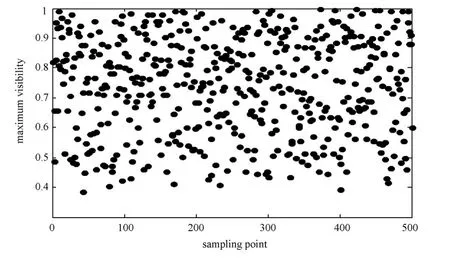
图5 采用三态PDR激光多普勒测速系统的最大可见度
由图5可知,采用三态PDR系统的最小可见度是0.38,偏振衰落现象完全消失,该方案大幅度提高了系统的可见度,可改善系统探测性能。
4 实验验证
为了验证以上的分析,在实验室条件下搭建系统进行了测试,系统主要参数如表2所示。
利用天瑞中海公司的PMC100步进电机作为测试目标,凌华科技的PCI-9846高速数字仪作为信号采集模块,测试系统的可见度,实验结果如图6所示。
采用三态偏振分集接收的消偏振衰落方案对系统进行优化,测试系统可见度如图7所示。
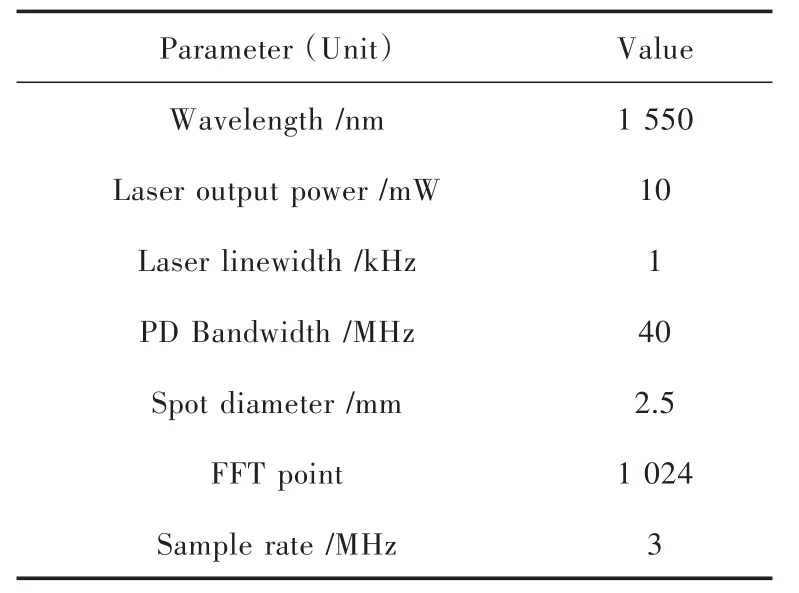
表2 系统关键参数
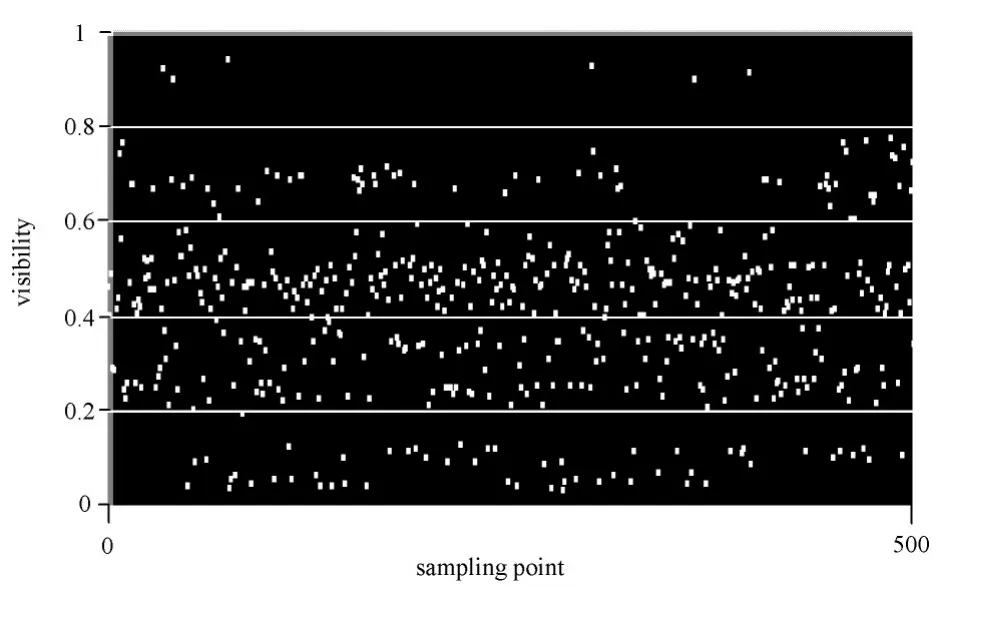
图6 存在偏振衰落的测速系统输出信号可见度
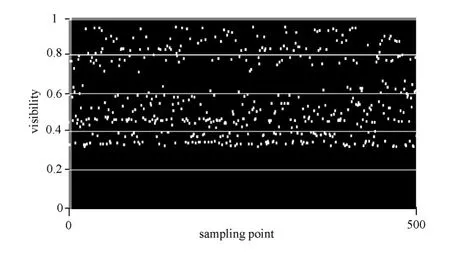
图7 消偏振衰落之后测速系统输出信号可见度
对比图6和图7可以看出,存在偏振衰落的测速系统输出信号可见度可接近于零;消偏振衰落之后系统输出信号可见度最小值为0.32,表明三态PDR可有效消除系统的偏振衰落现象。考虑到测试是在较为理想的实验室情况下进行,若进行外场实验,可见度值必定还会降低,所以该消偏振衰落方案是必要且可行的。
5 结 语
文中对激光多普勒测速系统的偏振衰落产生机理进行了理论分析,建立了系统可见度与偏振态的两个参量数学模型,定量分析偏振衰落对系统可见度的影响,进而对系统的偏振分集接收消偏振衰落方案进行了研究。通过实验验证采用三态偏振分集接收的消偏振衰落方案能够避免传输光偏振态变化导致干涉信号完全衰落的现象,系统可见度明显提高。因此,在激光多普勒测速系统中采用三态PDR消除偏振信号衰落方案是可行且有效的,适合于实验室研究和工程应用。
[1]SUI Xiao-lin,ZHOU Shou-huan,CHEN Nian-jiang,et al.All fiber coherent doppler lidar for space craft safe landing[C]//International Conerence on Optoelectronics and Microelectronics(ICOM).[S.l.]:[s.n.],2012:198-202.
[2]张小跃,林志立,张春熹.基于激光测速仪的高精度定位定向技术[J].强激光与粒子束,2014,26(3):66-70.
[3]范哲,张春熹,欧攀,等.车载三波束多普勒激光雷达波束配置研究[J].中国激光,2014,41(2):309-314.
[4]ZHU Xiao-peng,LIU Ji-qiao,BI De-cang,et al.Development of an all-solid coherent Doppler wind lidar[J].Chinese Optics Letter,2012,128(3):1-3.
[5]KERSEY A D,MARRONE M J,DANDRIDGE A,et al.Optimization and stabilization of visibility in iinterferometric fiberoptic sensors using input-polarization control[J].Journal of Lightwave Technology,1988,6(10):1599-1609.
[6]WANG Dong-bing,ZHOU Jin-feng.Research on polarization control in the long distance fiber-optic sensing[J].Fiber Optic Sensors and Optical Coherence Tomography,2013,8914:1-8.
[7]齐龙舟,肖浩,李芳,等.光纤激光水听器消偏振衰落技术研究[J].传感器与微系统,2008,27(7):21-23.
[8]荆振国,殷锴,张敏,等.干涉型光纤传感器的消偏振衰落技术研究[J].光子学报,2009,38(8):2024-2028.
[9]钟川.偏振相关光纤Mach-Zehnder干涉器件的研究及其应用[D].杭州:中国计量学院,2013.



