龚畅 王华君 李荣 徐平平
摘 要: 目前大多数的目标跟踪算法都假设目标检测的概率与轨迹的状态无关,但是随着目标跟踪性能的降低,这个假设通常不正确,针对此问题,提出一种基于状态检测的目标运动轨迹跟踪算法。不同于大多数现有算法,该算法在目标运动轨迹与检测状态相关的基础上展开。首先预测从先前时刻到当前时刻的每个跟踪的概率密度函数;然后从测量值集合中选取一个子集用于更新,并计算相似度测量;最后迭代计算跟踪质量和目标轨迹评估,将目标检测的状态依赖概率融入到多目标跟踪器中。利用二维多目标跟踪进行仿真实验,交替固定传感器每秒都对监控区域进行扫描,结果显示,跟踪确认率可达97%,显著提高了跟踪性能。此外,该算法在其他交通视频上也有较好的跟踪效果,具有较好的实用性。
关键词: 多目标跟踪; 视频跟踪; 运动轨迹仿真; 状态检测
中图分类号: TN919?34; TP391 文献标识码: A 文章编号: 1004?373X(2016)07?0051?06
Abstract: The majority of target tracking algorithms assume that the probability of the target detection is independent of track state, but it is usually incorrect with the performance degradation of the target tracking. For this issue, a target moving trail tracking algorithm based on state detection is proposed. Unlike most current algorithms, the proposed algorithm is unfolded based on the correlation of target moving trail and detection state. Each tracked probability density function from previous moment to current moment is forecasted, and then a subset for update is selected from the measured value set and the similarity measurement is calculated. The tracking quality is iteratively calculated, the target trail is finally evaluated, and the state dependence probability of target detection is fused into multi?target tracker. The simulation test was performed by means of the two?dimensional multi?target tracking. The alternate fixed sensors are used to scan the monitored area per second. The scanning results show that the tracking identification rate can reach up to 97%, and the tracking performance is significantly improved. In addition, the algorithm has a good tracking effect in other traffic videos, and has good practicability.
Keywords: multi?target tracking; video tracking; moving trail simulation; state detection
0 引 言
目标跟踪[1]一般是指监控系统对目标的数量和轨迹进行评估,在军事、交通、安防等重大领域应用非常广泛[2?3],是一个非常热门的研究课题。但对轨迹的评估过程容易受到虚假信号(噪声、杂波和多路径)的影响。如何处理目标轨迹位于发生目标信号衰减的检测区域的目标跟踪非常重要[4]。
目标跟踪按照跟踪的数量可以分为单目标跟踪和多目标跟踪。已经有很多学者对其进行了研究。文献[5]提出改进的背景加权直方图算法,是一种单目标跟踪算法。其中彩色直方图作为目标的特征表示,将背景进行加权以突出目标的权重,用理论和实验纠正文献[6]中关于背景加权方法的错误,扩展了背景加权在目标跟踪中的思想。然而,该方法对于近似的颜色区域目标经常发生漂移。文献[7]提出了著名的跟踪学习检测(Tracking?Learning?Detecting,TLD)算法。与传统的跟踪算法不一样,TLD将跟踪和检测同时进行,同时利用N?P专家的学习方法对跟踪和检测出现的错误样本和正确样本进行分类,纠正跟踪和检测过程中的错误,而且跟踪模板和检测模板都进行更新。其链接[8]对研究和工程都很有帮助,然而,TLD算法是一种单目标跟踪,因为多目标的NP学习过程十分困难。文献[9]对每个目标轨迹的评估都在可能的测量序列子集上进行。每个跟踪组件的概率密度函数(pdf)可能是一个典型的高斯函数(对于单模型轨迹)或一个典型的混合高斯函数(对于多模型轨迹)。其多目标分割跟踪也具有不错的效果,然而,其假设比较理想,没有考虑复杂情况。文献[10]的信号目标跟踪算法对每个跟踪目标进行单独的更新,这种算法假设每次测量中都包含干扰遮挡或对检测到的目标进行跟踪。当检测到多个目标靠近时会降低跟踪的性能。
目标跟踪器在每次测量前都不知道测量的先验信息。利用测量值对跟踪器进行初始化,由于不知道每个测量值的确定初始值,因此不仅对正确的跟踪器(跟踪目标)进行了初始化,而且也对错误的跟踪器(不跟踪目标)进行了初始化。对错误跟踪器的辨别能力是目标跟踪的一个非常重要的性能。而且大多数发表的目标跟踪器方法都假设:当目标跟踪性能逐步减弱时,目标检测概率依然保持不变。
单目标跟踪分割(ITS)[11]可以概括为是与状态相关的目标检测概率模型,ITS是一种完全单目标跟踪方法。跟踪质量和目标轨迹评估都迭代的进行计算,本文将这些结果进行扩展以进行多目标跟踪,提出一种结合了ITS的JITSpd算法,JITSpd算法对最优数据相关测量进行枚举,然后对所有的联合测量值进行评估。
1 假设模型
1.1 目标模型
在监控空间中目标的数量事先并不知道,用[χτk]表示目标[τ]在时刻[k]的存在性,[χτk]是一个以马尔可夫链进行传播的随机事件[12],利用跃迁几率[γ]对[χτk]进行参数化:
1.2 传感器模型
传感器在每个测量时刻[k]产生测量值。对于多个传感器的场景,连续向每个传感器申请测量值,因此在不失一般性的情况下本文可以假设为单个传感器。目标[τ]的检测概率[PD(xτk)]是目标轨迹状态[xτk]的函数,本文假设[PD(xτk)]的表达式可以用下式进行逼近:
(1) 预测从更新时刻[k-1]传播到当前时刻[k]的每个跟踪概率密度函数;
(2) 选取测量值,在测量值集合[Zk]中选取一个子集用于更新;
(3) 计算测量相似度;
(4) 数据关联是对目标存在的可能性进行更新,并计算测量值初始值的后验概率;
(5) 轨迹更新估计。
2.1 预测
2.2 选取测量值
测量值的选取操作对于ITS系列的每个成员都是相同的[11]。每个跟踪[τ]都是独立地选取测量值,每个组件[ck-1]的每个模型[σk]选取一个测量值集合[zck-1σk?Zk]。如果在时刻[k]检测到目标[τ,]并且[ck-1]是真的组件,目标[τ]服从模型[σk,]那么[yτk∈zck-1σk,]其预定义的概率为[PG。]
组件[ck-1]和跟踪分别选取的测量值集合为[zck-1?Zk]和[zk?Zk,]即:
2.3 相似度测量
关于JITSpd的相似度测量,式(4)中的检测拒绝切口[d]在测量过程中也起到了一定的作用,测量值由[δd]的值、[Rd]的协方差和测量函数[hd]构成。当运用[Zk,i]和[δd]去传播均值为[xck-1σk,]协方差为[Pck-1σk]的高斯噪声时,利用[xi,dc,σ]和[Pi,dc,σ]分别表示获取评估的均值和协方差。值[i=0]或[d=0]表示没有使用相应测量值。
2.4 JITSpd数据关联
联合多目标跟踪采用所有适宜的全局测量值进行跟踪配置。将跟踪分成簇,每个簇是一组跟踪的集合,每个簇中选取的测量值并不与其他簇共享,选取的测量值仅用于这个簇。每个簇独立进行处理,在此,本文对一个簇类数据关联进行描述。随着跟踪和测量值的增加,联合事件的个数也一起增加,因此这种方法仅对于目标数量较少的良性环境下是可行的。
每个联合事件[εk]分配给每个跟踪零个或一个情况下所选取的测量值,每个联合事件[εk]的定义如下:
(1) 用[T0(εk)]表示分配零个测量值的跟踪;
(2) 用[T1(εk)]表示分配一个测量值的跟踪;
(3) 测量值分配函数[i(τ;εk)]分配[Zk,i(τ;εk)]给跟踪[τ]。
当一个联合事件为真,则联合事件是互斥且完备:
2.6 算法归纳
本文提出的JITSpd是对JITS的归纳,推导的方式比较相似,算法假设如下:
(1) 给定的测量[Zk,i]表示目标检测状态,更新的轨迹状态概率密度函数[PxkZk,i,Zk-1]与[Zk,i]的似然度成比例,即[PZk,ixk,]但不是检测概率的函数。
(2) 给定检测时间,数据关联概率是平均似然度测量函数。
(3) 给定的非检测事件,没有信息用以更新轨迹状态概率密度函数。
JITSpd所面临的挑战如下:
(1) 给定的测量[Zk,i]表示目标检测,更新的轨迹状态概率密度函数[PxkZk,i,Zk-1]与[Zk,i]的似然度成比例,即为[PZk,ixkPD(xk);]
(2) 给定的检测事件,数据关联概率是平均检测似然度的函数;
(3) 给定的非检测事件,更新的轨迹状态可能位于较低的[PD(xk)]区域内。
3 实验与分析
3.1 实验准备与参数说明
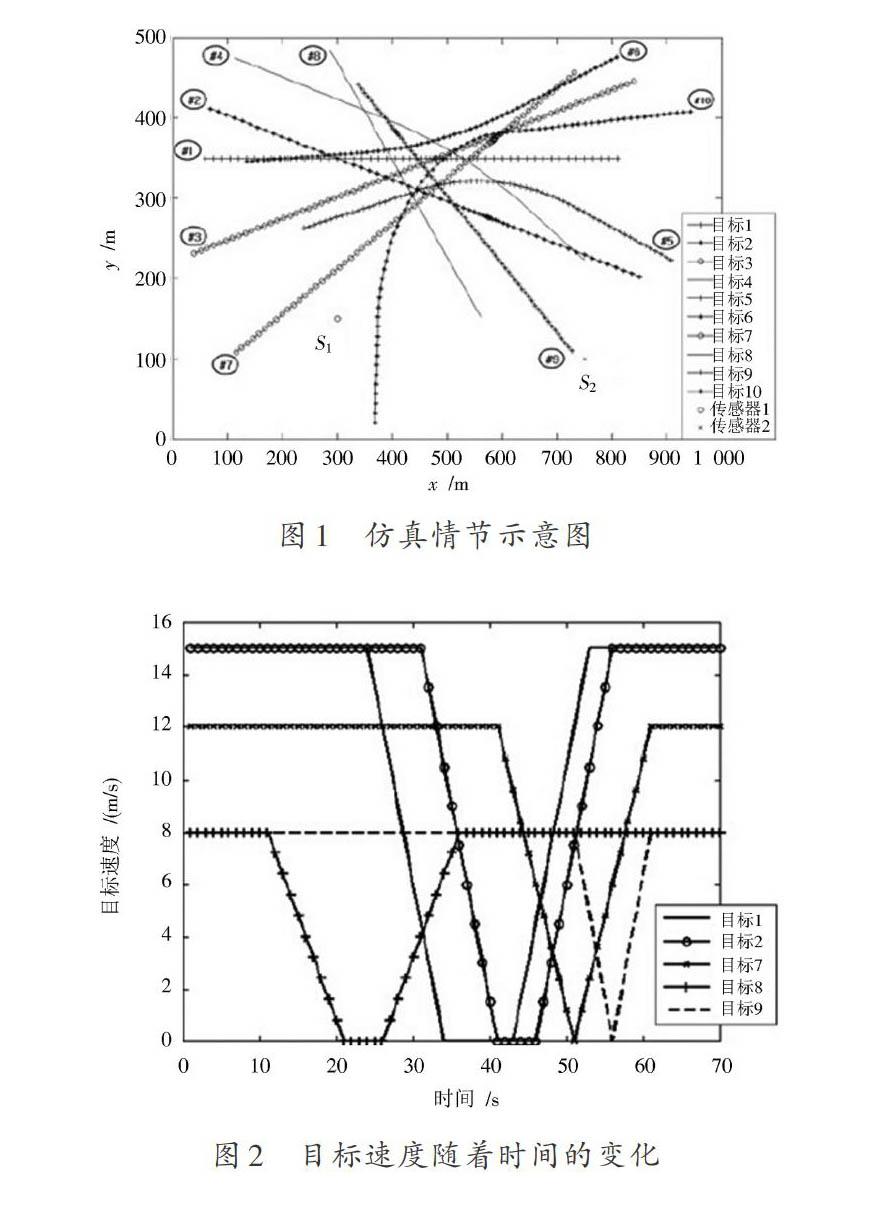
如图1所示,本文考虑的是二维多目标情况,利用交替固定传感器每秒都对监控区域进行扫描。目标#3和#10的速度恒定不变,为12 m/s,目标#4,#5和#6的速度恒定不变,为10 m/s,其他目标的速度随着时间的变化而变化,如图2所示。
轨迹状态[xk]由2D位置和速度矢量构成,本文考虑了两种轨迹扩展模型,模型[σ=1]对应于等速运动,模型[σ=2]通过增加模型噪声协方差矩阵来调节加速度。两种模型具有相同的扩展矩阵:
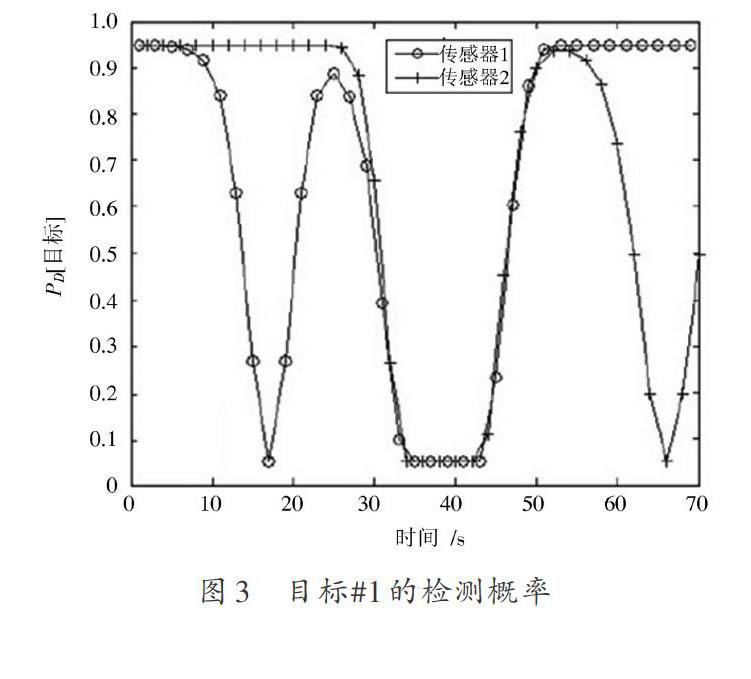
即传感器信号处理过程嵌入了一个移动目标指示器,这个指示器可以减弱多普勒频率信号。当多普勒速度[δ1=1 m/s]时,可以得到最大衰减量和最小目标检测概率,衰减量变为零以逼近三次标准偏差,或[±9 m/s]多普勒速度。最大的检测概率是[D0=0.95],这是较高多普勒速度条件下获取的目标检测概率。最小检测概率等于[D0-W12πR1?0.05]。检测概率依赖于每个目标的多普勒速度,以及多普勒速度对应的传感器获取的测量值。当目标没有固定或当速度矢量的矢量半径正常连接到相应传感器的目标时,检测概率下降0.05。图3给出了目标#1的检测概率随时间的变化。
当[R=25I2 m2]时,利用线性传感器测量目标位置,杂波测量强度[ρ=10-5 m-2]。
在每次扫描过程中利用测量对对跟踪进行初始化,测量对来自于最近两次满足最大目标速度(20 m/s)约束(两个点不同)的扫描过程进行测量。如果在后续扫描过程中目标存在的概率超过确定阈值,跟踪被验证,保持验证直到结束。如果在后续扫描过程中目标存在的概率小于终止阈值,那么终止跟踪。每个仿真实验有1 000次模拟运行,每次模拟运行仿真70次扫描。
3.2 仿真实验结果与分析
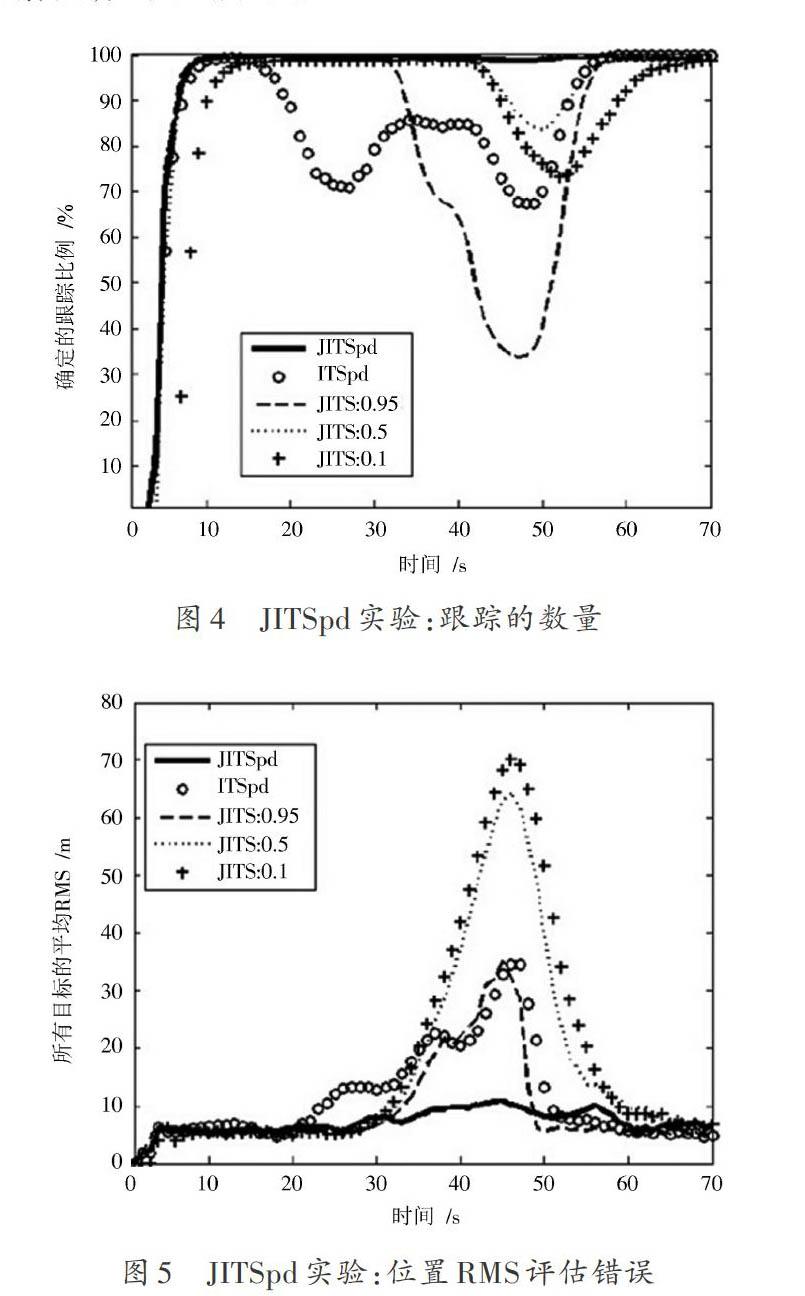
本文假设检测概率恒定为0.95,0.5和0.1,针对文献[11]的ITSpd,本文的JITSpd和文献[9]的JITS算法进行比较。最优多目标数据关联不能利用合理的计算资源处理10目标情况,因此本文限制实验的目标为#1,#2和#3。
图4给出了跟踪成功几率的平均百分比。比如,在时刻22的百分比为100%,即在每次仿真运行过程中,每个跟踪器跟踪的目标在时间间隔1~22 s内已经进行了确认。当目标固定时,JITSpd的跟踪确认名义上达到了100%,而且仅丢失了极少的跟踪情况。随着时间的变化,确认跟踪的所有目标的平均值的位置RMS评估发生错误,如图5所示。
表1中给出了跟踪保留统计数据。列“nCase”表示时刻[k=10]时确认的跟踪个数,在“nCase”中包含了跟踪的相关数量,持续跟踪初始目标直到[k=70]时执行“nOK”列。“nS”列显示了“nCase”跟踪的相对数量,“nCase”跟踪在[k=70]处转换目标,在“nL”列终止跟踪“nCase”内相对数量的目标或停止跟踪所有目标,因此利用JITSpd显著提高了跟踪保留性能。可以得出本文提出的JITSpd显著提高了多目标跟踪器的所有测量性能。
3.3 其他视频的仿真实验
为了更好地说明本文算法的效果,本文对两种不同视频进行仿真实验,图6是本文算法对目标跟踪的效果图,从标出的视频帧中的两个人的运动轨迹可以看出,即使目标有短时间重叠也能准确跟踪。
4 结 论
本文针对杂波环境下的多目标跟踪提出了基于目标存在性的算法,在杂波环境下可以利用轨迹状态信息。该算法进行递归查询,并且以目标存在概率的形式对跟踪质量进行评估,这样可以辨别错误的跟踪,因此形成了一个完全自动的目标跟踪应用。在目标存在情况下,与其他先前发表的算法相比,本文算法能显著提高跟踪性能。然而,计算方面的考虑限制了JITSpd只能处理较少数量靠近目标的情况,未来的研究重点是进一步优化JITSpd,使之能处理含有大量目标和严重干扰的情况。
参考文献
[1] 周小娟,李春晓.基于偏最小二乘分析和稀疏表示的目标跟踪算法[J].重庆邮电大学学报(自然科学版),2014,26(1):175?181.
[2] 张丽.军事运动目标的识别与跟踪研究[D].沈阳:东北大学,2009.
[3] 王健.基于目标跟踪的交通违停事件检测的研究[D].合肥:中国科学技术大学,2011.
[4] 江晓莲,李翠华,李雄宗.基于视觉显著性的两阶段采样突变目标跟踪算法[J].自动化学报,2014,40(6):1078?1084.
[5] NING J, ZHANG L, ZHANG D, et al. Robust mean?shift tracking with corrected background?weighted histogram [J]. IET computer vision, 2012, 6(1): 62?69.
[6] COMANICIU D, RAMESH V, MEER P. Kernel?based object tracking [J]. IEEE transactions on pattern analysis and machine intelligence, 2003, 40(5): 564?575.
[7] KALAL Z, MIKOLAJCZYK K, MATAS J. Tracking?learning?detection [J]. IEEE transactions on pattern analysis and machine intelligence, 2012, 34(7): 1409?1422.
[8] Anon. Index of personal Z. Kalal TLD [EB/OL]. [2010?02?05]. http://personal.ee.surrey.ac.uk/Personal/Z.Kalal/.
[9] MUSICKI D, SONG T L, LEE H H, et al. Correlated Doppler?assisted target tracking in clutter [J]. IET radar, sonar and na?vigation, 2013, 7(1): 94?100.
[10] 周良毅,王智,王营冠.基于动态遮挡阈值的多视角多目标协作追踪[J].计算机研究与发展,2014,51(4):813?823.
[11] SONG T L, MUSICKI D, KIM D. Target tracking with target state dependent detection [C]// Proceedings of 2012 15th IEEE International Conference on Information Fusion. Singapore: IEEE, 2012: 324?329.
[12] 林运国,雷红轩,李永明.量子马尔可夫链安全性模型检测[J].电子学报,2014,27(11):1858?1864.
[13] SU Guanhua, MA Huimin, HOU Yu, et al. A robust approach for anti?jamming target tracking in forward looking infrared imagery [C]// Proceedings of 2011 Sixth International Conference on Image and Graphics. [S.l.]: IEEE, 2011: 636?641.
[14] LI Z Z, LI G P, TAN J, et al. Low observable moving target tracking based on modified PDA?AI [J]. Journal of infrared, millimeter, and terahertz waves, 2010, 31(10): 1245?1256.
[15] 陈憬.基于协方差矩阵和导向矢量不确定性的鲁棒波束形成技术[D].成都:电子科技大学,2014.



