夏国清,陈华珍
(广州大学华软软件学院,广东 广州 510990)
模糊控制是近代控制理论的重要组成部分之一,它是一种基于语言规则与模糊推理建立在模糊集合上的控制理论[1]。在现代化工业控制中PID控制方法由于其结构简单和易于操作的优势,逐渐成为最常用的控制方法。结合模糊控制与PID控制,形成模糊PID控制,以便通过模糊控制弥补PID控制在非线性数学模型方面存在的不足,同时PID控制系统有助于改善模糊控制在两轮自平衡机器人智能控制系统中效果粗糙、无法精确控制的缺点。通过仿真实验证实,结合模糊理论与PID控制研发的两轮自平衡机器人智能控制系统具有适应性强、控制精度高、系统稳定等优点[2]。
1 模糊理论算法
模糊推理存在不确定性,因此只对模糊推理的部分算法进行分析。首先输出模糊集合,并根据元素及相对隶属度求出精确的加权平均值[3]。当模糊集合Z由连续函数组成时,表示为:

式中:n为状态向量;α为控制向量。当模糊集合Z由离散元素组成时,则可表示为:

式(1)、式(2)中,符号“∫”“/”“+”表示“构成”或“属于”关系,是模糊集合中一种特殊的表示方式[4]。通常情况下模糊推理的结果都是模糊概值,但在两轮自平衡机器人智能控制系统中必须要求精确的数值作为控制量。所以要在模糊推理的基础上加入PID控制系统,将得到的模糊值转换成所需的精确控制量,也就是对其进行去模糊化处理。根据应用系统的不同采用不同的方法进行去模糊化处理,已得到所需的运算结果[5]。
去模糊化的常用方法包括:加权平均法和重心法。加权平均法首先输出模糊集合并根据元素及相对隶属度求出精确的加权平均值[3]。重心法是所有去模糊方法中最为合理和流行的方法,对于两轮自平衡机器人智能控制系统的设计采用重心法进行去模糊处理更有利于达到控制精度高、系统快速稳定的要求[6]。通过对输出范围内向量的重心进行分析和考虑,对整个区域的重心进行计算,计算方法为:

式中:m为输入向量;αx(m)为输入向量对应的控制函数。由重心法对输出的模糊集合进行分析和计算有利于得到更精准的计算结果[7]。
通过以上算法将模糊推理与PID控制进行新的组合,把去模糊化处理方法引入控制器中,建立模糊PID复合系统[8]。系统结构如图1所示。

图1 模糊PID复合结构Fig.1 Composite structure of fuzzy PID
由图1可得,模糊PID复合系统相对简单,易于操作,有助于提高控制器的稳定性和高效性,有效解决了模糊控制粗糙不够精确等问题[9]。
2 两轮自平衡机器人的模糊PID控制器设计建模
经过前文中的模糊推理和去模糊化方法构建了模糊PID复合控制结构[10]。对输出模糊子集进行选择,并得出其隶属函数最大值及对应值,输入负荷控制系统中以增强系统功能,以便更好地对受控对象进行控制[11]。由PID控制器及模糊控制器共同构成新的模糊自适应PID控制系统,系统结构如图2所示。
模糊PID控制系统的仿真模型和常规控制仿真模型基本相同,区别在于模糊PID控制器通过内置函数编程实现对系统的控制。此外,模糊PID控制器有模糊控制器输出、误差和误差变化率三个输入反馈值对其他环节数据的输出进行计算,并根据计算结果建立仿真模型[12]。模糊PID控制系统仿真模型如图3所示。
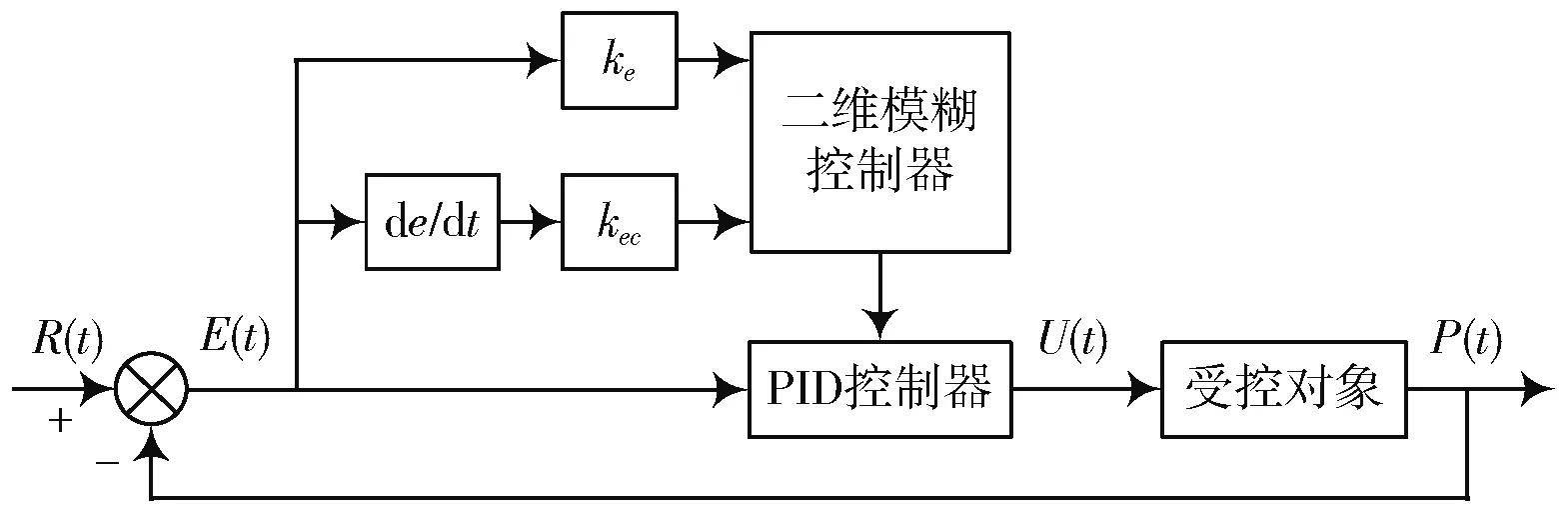
图2 模糊自适应PID控制系统结构图Fig.2 Structure diagram of fuzzy adaptive PID control system
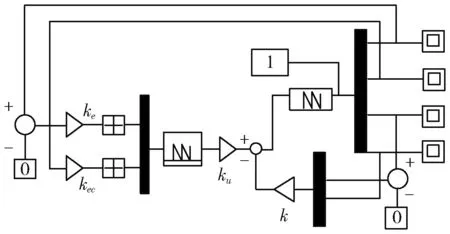
图3 模糊自适应PID控制系统仿真模型Fig.3 Simulation model of fuzzy adaptive PID control system
在基于模糊理论的PID控制系统中,模糊控制器对PID控制器的参数进行分析和调节并制定合适的模糊规则,从而得到PID参数的理想整定值[13]。为了更好地对两轮自平衡机器人的智能系统进行控制,可以通过建立控制决策表的形式进行控制规则描述。具体表格内容如表1所示。
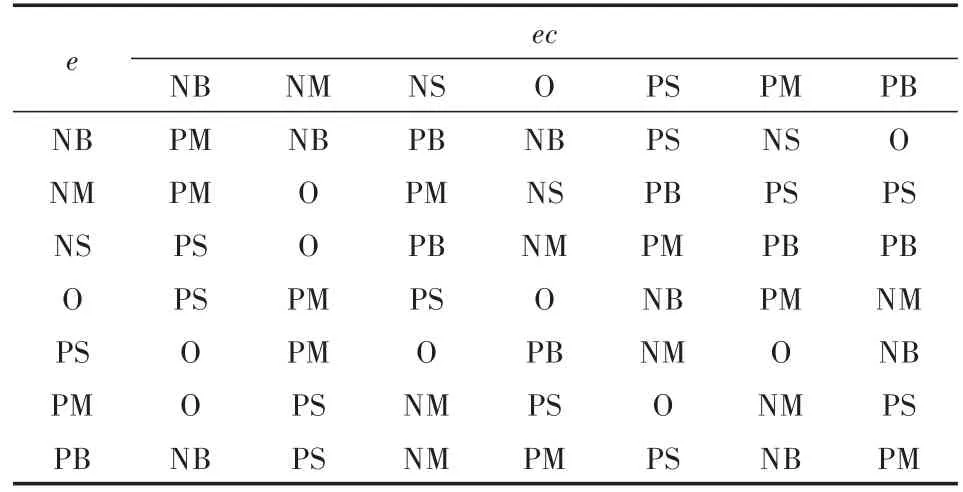
表1 模糊控制决策表Table 1 Fuzzy control decision table
通过建立控制决策表配合模糊推理的运算方法建立模糊理论PID控制系统仿真模型有助于实现两轮自平衡机器人智能控制系统的稳定性和精准度[14]。
3 仿真与测试
为了对两轮自平衡机器人的模糊PID控制器进行验证,进行了仿真测试。测试中首先对基于模糊自适应PID控制器的响应速度和阶跃信号响应能力分别进行测试,测试结果如图4,图5所示。
图4记录了模糊自适应PID控制器响应速度的测试结果,图中分别对传统的PID控制器的响应速度和基于模糊控制理论的PID控制器的响应速度进行了记录和对比。从图中可以看出传统控制器从进入稳定的状态所消耗的时间相对于文中提出的控制系统更长。由此可见,基于模糊理论的PID控制器在响应速度上比传统控制器更加敏感精准。
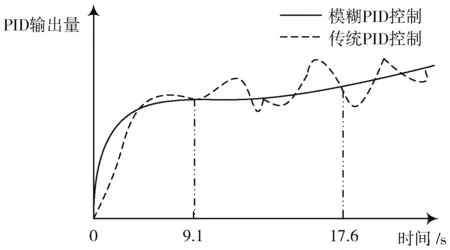
图4 模糊自适应PID控制器的响应速度测试结果Fig.4 Test results of response speed using fuzzy adaptive PID controller
图5分别对模糊自适应PID控制器和传统控制器的阶跃信号的响应测试进行了记录和对比。从图中可以发现基于模糊理论的PID控制器的信号相对稳定,而传统控制器在10~11 s时存在较大的连续性波动,由此证实基于模糊理论的PID控制器在运作过程中比传统控制器更稳定。
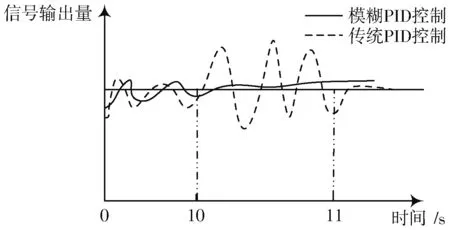
图5 模糊自适应PID控制器阶跃信号的响应测试结果Fig.5 Test results of step signal response using fuzzy adaptive PID controller
图6以传统控制器仿真模型参数为基础,测得控制器的速率、位置、俯仰角和俯仰速率曲线。通过对两轮自平衡机器人系统当前的位移、倾角、偏转角,以及实时迎角进行检测和对比,对测得的状态信息进行分析,并传送至平衡控制器和偏转控制器中进行控制运算,通过仿真实验的记录和分析对两轮自平衡机器人在干扰下的倾角响应曲线进行分析记录,结果如图7所示。
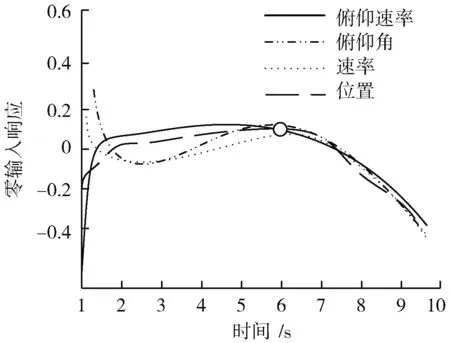
图6 系统零输入状态响应曲线图Fig.6 Curves of system zero input state response
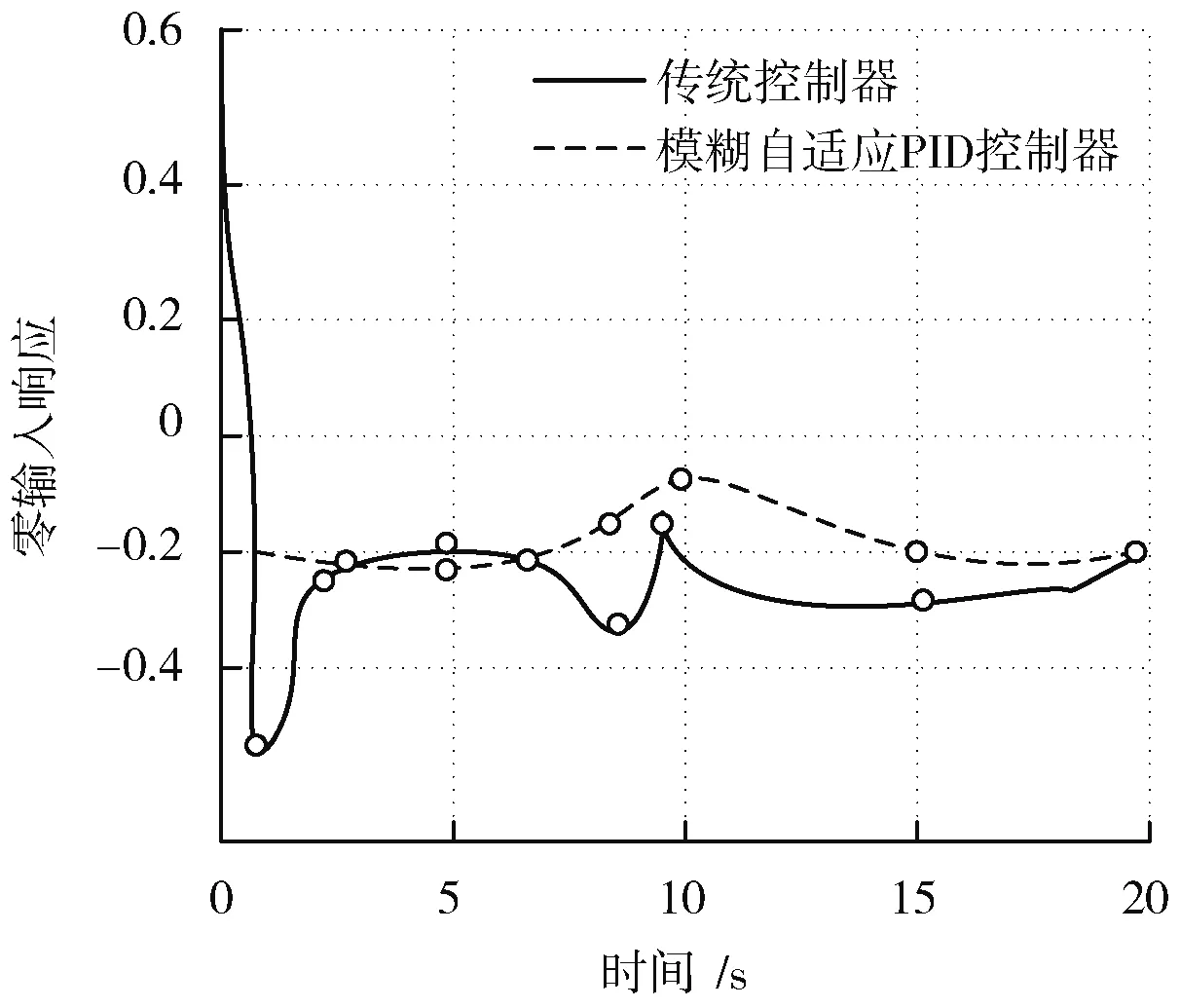
图7 加入干扰信号后的倾角响应曲线Fig.7 Curves of inclination angle response after adding interference signal
由图7可知,与传统控制器相比,在模糊PID控制器的控制下两轮自平衡机器人状态响应的快速性虽然受到影响,但信号干扰对位移响应的影响较小,比传统控制器更加稳定。测量结果证实模糊PID控制系统的控制效果更好,控制精度更高。
扶正两轮自平衡机器人,在本体成直立状态时对两轮自平衡机器人在零输入下能否保持平衡状态进行观察,打开示波器,对传统两轮自平衡机器人与基于模糊理论PID智能控制系统机器人的实时位移进行测量和记录,结果如图8所示。
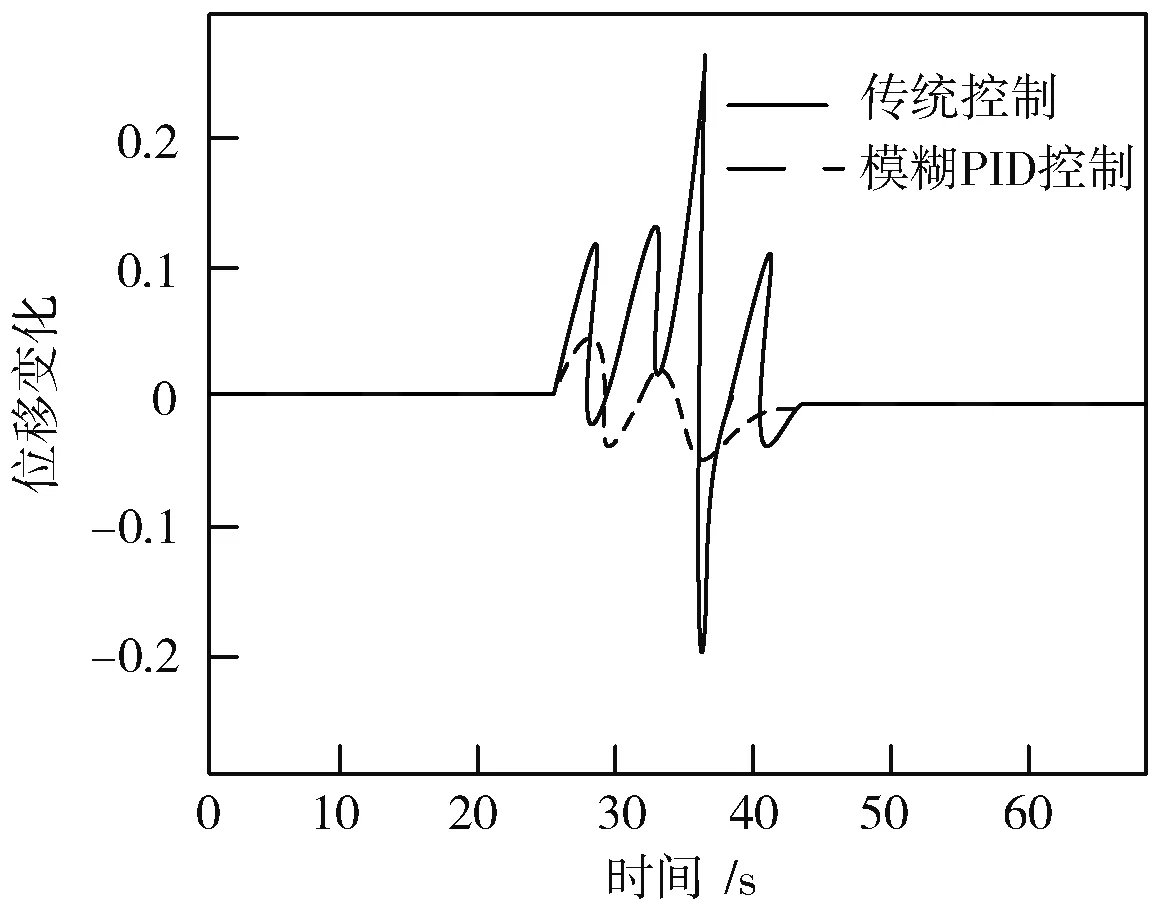
图8 实时位移曲线Fig.8 Curves of real-time displacement
保持控制器中参数设置一致,再一次进行仿真实验,经过多次仿真试验得到模糊PID控制零输入状态下实时迎角响应曲线和实时偏转角响应曲线,结果如图9,图10所示。

图9 实时迎角响应曲线Fig.9 Response curve of real-time attack angle
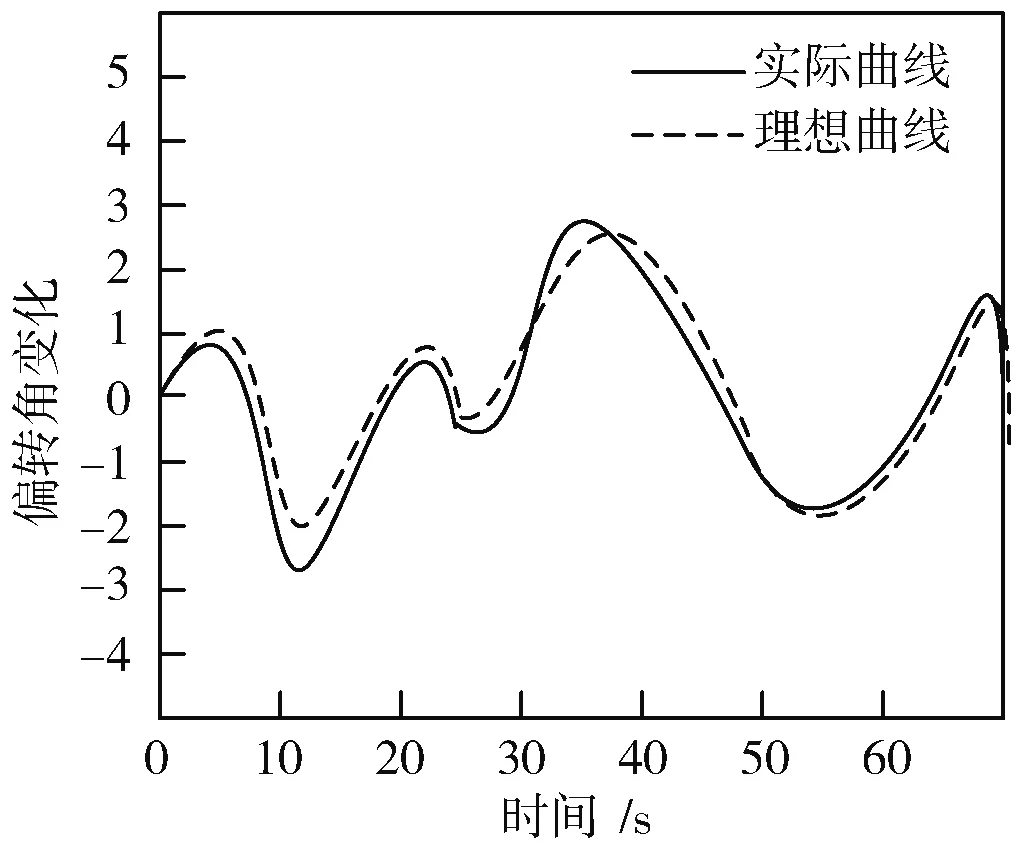
图10 实时偏转角响应曲线Fig.10 Response curves of deflection angle
从图10实验结果可知,两轮自平衡机器人相对于传统控制方法,模糊PID控制器作用能更好地实现平衡控制。由此证明,模糊理论和PID相融合的控制器有利于保障智能系统稳定,达到适应性强、控制精度高、系统稳定的设计目标。
4 结 语
实验结果证实,基于模糊理论的PID控制器具有良好的控制能力,可以达到灵活多样的控制效果。引入模糊控制理论设计的智能化的PID控制器,可有效实现两轮自平衡机器人智能控制系统的准确性和稳定性,且该设计结构简单和易于操作,能够有效满足于现代化两轮自平衡机器人智能控制系统的设计要求。



