陈 琳,薛 青,张俊峰,邓 青
(陆军装甲兵学院,北京 100072)
0 引 言
21 世纪以来,战争的形式已经发生了翻天覆地的变化,数字化战争已经成为发达国家军事发展的主流方向[1]。数字化战争就是信息的战争,军事决策中心需要在最短的时间内完成最正确的战时任务指挥工作,例如军事力量的指派和部署。面对如此庞杂的信息数据,传统的人工决策想要找到优化的解决方案是根本不切实际的[2]。因此,现代的信息化战争需要智能化的AI 技术辅助,遗传算法解决军事决策问题具有很大优势[3]。
遗传算法(GA)是一类借鉴生物界的进化规律演化而来的随机化搜索方法,由美国的J.Holland 教授于1975年首先提出。目前,GA已成为进化计算研究的一个重要分支。文献[4]提出一种基于遗传算法的军事物流运输方法,通过改进遗传算法对模型进行求解,得到了较为满意的结果,可以在复杂约束的条件下实现运输车辆最少、车辆满载率高、车辆运输路径最短的目标,但是遗传算法仍存在一定的局限性。以算法结合为目的,文献[5]将模糊聚类遗传算法在军事装备物流中心选址中进行了具体应用。该混合算法把模糊聚类网络模型融合到遗传算法种群构建中,可以有效地避免遗传算法易出现早熟的现象,具有很好的鲁棒性和可信度。
在以上研究结果的基础上,为了解决军事决策任务中的最优解问题,在传统模糊理论基础上设计一种优化的自调节模糊积分控制器,并将其与遗传算法相结合以便提高搜索和收敛的速度,提高解的质量。此外,将提出的模糊积分控制遗传算法在军事任务分配问题中进行了Matlab 实例仿真。仿真结果显示,相比标准遗传算法,模糊积分控制遗传算法具有更高的稳定性,验证了提出算法的有效性和先进性。
1 遗传算法基本理论
GA 是一种基于“适者生存”自然法则的高度并行、随机和自适应的优化算法[6]。它衍生于生物遗传进化机制,模拟基因重组与进化的自然过程,进行类似于自然选择、配对交叉和变异的运算,经过多次重复迭代(即世代遗传)得到最终优化结果[7-8]。遗传算法主要有以下特点:
1)继承自然进化过程所固有的并行性,即同时有大量物种彼此独立,通过自然选择、交配和基因突变向前进化。这一特性使其可同时对搜索空间的多个解进行评估,大大提升了解决问题的速度;
2)采用概率变迁规则指导搜索,使个体不断地改变,群体得以朝着最优方向演化,具有启发式搜索能力,解决问题质量高;
3)采用自然进化机制来表现复杂现象,能够快速可靠地求解非常困难的问题。
遗传算法解决优化问题时,需要依据具体问题设定GA参数,这些参数包括种群中个体的数量、交叉概率、变异概率、遗传代数。
研究结果显示,标准遗传算法具有以下缺陷:存在“早熟”现象;计算较为复杂,运行时间较长;稳定性差。而模糊控制器可以有效弥补以上问题。
2 自调节修正模糊控制
模糊控制算法主要由语言变量和模糊集合理论构成,适用于非线性、复杂、大时滞和难以建立精确数学模型的控制过程。美国加利福尼亚大学的L.A.Zadeh 教授在1965年首次提出模糊集合理论。由于具有较高适应性和鲁棒性,模糊控制算法得到了巨大的发展和广泛的应用。文献[9]提出了一种自适应模糊控制算法,在鲁棒性性能上具有较高的优势。
2.1 自调节模糊控制器设计
本文使用简化的模糊控制规则来实现控制算法,其表达方式如下:

式中:a表示调节修正因子;E,EC和U都是量化后的模糊变量,在其属于的论域内具有相同的划分等级,如下所示:

可以通过对调节修正因子a的数值进行修改,来实现系统误差E和系统误差变化率EC对糊控制器输出模糊变量U的影响,也就是说调节a即表示调整控制规则。一般来说,调节修正因子a的自调节方式如下:

式中调节修正因子a∈[aL,aH]。为了改进控制算法的性能,本文通过调节修正因子a来实现自调节。主要思想是根据系统误差E的变化,实时对调节修正因子a的曲线进行调整。实时调节a的公式如下:

式中:k表示此时单位阶跃响应区域内的修正曲线斜率;am和Em表示斜率变化是修正曲线旋转的中心点的横纵坐标,在本文中数值为(N/2,0.5),其中N表示误差绝对值 |E|的最大值。调节斜率k的计算方法如下:

式中:k0表示初始斜率表示最大误差变化率(属于前一个响应阶段)。通过结合式(4)和式(5),得出调节修正因子a,可以表示为:

本文提出改进的自调节修正因子a模糊控制器原理如图1 所示。
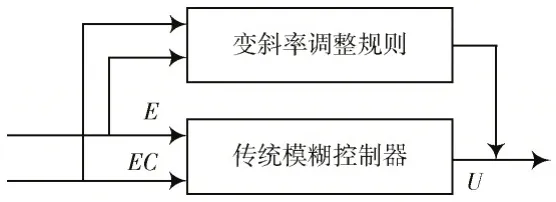
图1 提出的自调节修正模糊控制器原理图Fig.1 Schematic diagram of fuzzy controller with self-regulation
2.2 军事任务分配问题
兵力部署问题的数学模型如下:

式中:cij表示第i个队伍执行第j个任务的效率;xij表示取值为0 或者1的一个整数,当分配第i个队伍执行第j个任务时,x=1,否则x=0;n为任务总数。
任务分配问题的适应度函数可表示为:

式中m为军事单位的总数。
3 仿真实验与结果分析
本文在Matlab 环境下,将提出的模糊积分控制遗传算法和标准遗传算法[4]分别进行兵力部署问题仿真实验。初始种群的数量设为20,最大迭代数设为200,模糊控制器的参数Ku,Ke和Kec分别设置为0.1,5和45。斜率自调节调整模糊控制算法的修正曲线旋转的中心点(Em,am)设置为(N/2,0.5),曲线初始斜率k0设置为0.133 3,即:

200 次迭代后两种算法的寻优结果如图2 所示,可以看出,标准遗传算法进化速度较慢,最优值的求解过程较缓慢,出现了“早熟现象”。而模糊积分控制遗传算法的进化速度较快,最优值的曲线上升迅速,且其数值较高,体现出了较好的寻优能力,并一直能够保持稳定。
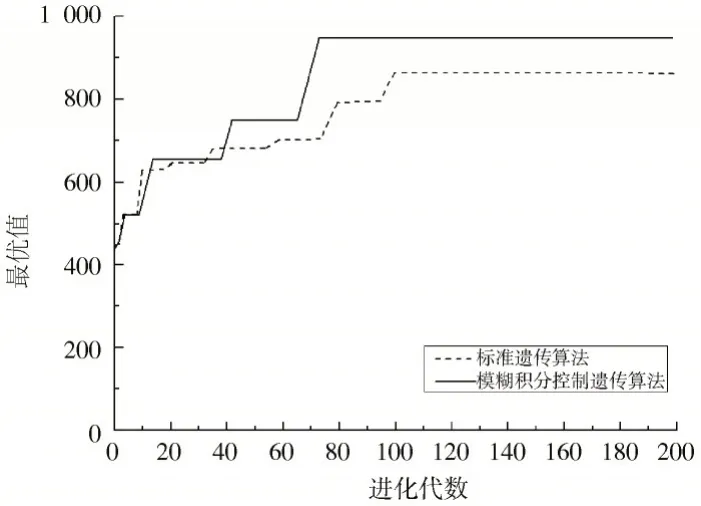
图2 寻优结果Fig.2 Optimization results
4 结 语
本文提出一种适用于军事决策的模糊积分控制遗传算法。首先对典型遗传算法的原理和不足之处进行分析。然后设计了一种优化的自调节模糊积分控制器,并将其与遗传算法相结合以便提高搜索和收敛的速度,提高解的质量。最后将提出的模糊积分控制遗传算法在军事决策系统中进行了Matlab 实例仿真。仿真结果显示,相比标准遗传算法,模糊积分控制遗传算法具有更高的稳定性,验证了提出算法的有效性和先进性。



