王晓宁
摘 要: 针对传统城市空间尺度要素特征提取系统没有分类处理遥感影像多尺度纹理特征,导致提取效果差、精度低等问题,设计一种基于机器视觉的城市空间尺度要素特征提取系统。基于机器视觉技术将数字图像处理与计算机理论相结合,采用灰度共生矩阵法提取遥感影像多尺度纹理特征,并利用决策树分类法对其展开分类后,获取城市遥感影像分类结果。通过直方图阈值分割方法提取水体特征,利用决策树分类法提取建筑物特征,通过纹理参数分割、数字形态学处理、特征矢量化等步骤提取植被特征,运用数学形态学和边缘检测提取道路、阴影以及裸地特征。实验结果表明,该系统空间尺度要素特征提取,准确率高达95.02%,精度高;并且速度快、效率高,说明该系统实用性较好。
关键词: 城市空间尺度; 要素特征提取; 机器视觉; 纹理特征提取; 决策树分类; 系统设计
中图分类号: TN911?34; TP75 文献标识码: A 文章编号: 1004?373X(2020)22?0168?05
Abstract: In allusion to the problem that traditional urban spatial scale element feature extraction system does not classify and process the multi?scale texture features of remote sensing images, which results in the poor extraction effect and low precision, an urban spatial scale elements feature extraction system based on machine vision is designed. The digital image processing is combined with computer theory based on machine vision technology, the multi?scale texture features of remote sensing images are extracted by means of the gray scale co?existing matrix method, and the remote sensing images are classified by means of the decision tree classification to obtain the classification results of urban remote sensing images. The water features are extracted by means of the histogram threshold segmentation, the building features are extracted by means of the decision tree classification, the vegetation features are extracted by the texture parameter segmentation, digital morphological processing and feature vectorization, and the features of the road, shadow and bare ground are extracted by the mathematical morphology and edge detection. The experimental results show that the extraction accuracy of spatial scale element feature of the system is 95.02%, the extraction precision is high, and the extraction efficiency and speed is excellent, which indicates that the system is practical.
Keywords: urban spatial scale; element feature extraction; machine vision; textural features extraction; decision tree classification; system design
0 引 言
伴随着新政策的施行,城市空间布局发展体系逐渐完善,城市魅力呈现集中展示趋势,城市化范围扩大是发展的必然趋势,为降低城市景观格局遭到破坏的概率,需要精确提取城市空间尺度要素特征[1]。常利用遥感技术对城市的各项数据进行采集,将不断扩大的城市情况实时捕捉。城市空间一般具备集中或零散的公用设施与市政公共设施,城市空间尺度要素主要包括建筑物、植被、水体、道路、裸地、阴影等,高分辨率遥感影像能够精准捕捉这些尺度要素的细节[2]。
遥感影像的采集和处理需要利用到机器视觉技术,机器视觉技术将数字图像处理与计算机理论相结合,对采集到的影像信息进行处理,提取出有用的影像信息展开识别,即在对影像进行处理时,使用相关数字技术或数字计算机,对影像进行处理与运算,获取所需影像信息,例如使用相关算法对影像进行纹理特征处理,获得城市空间尺度要素特征[3]。纹理特征能够精准展现高分辨率遥感影像细节信息,为此结合遥感影像中的纹理信息可精准提取城市空间尺度要素特征[4]。城市空间尺度要素分为多种尺度,具有差异性的空间分辨率,可以将不同的尺度要素进行分类。有研究表明,多尺度纹理要素特征提取可以对尺度要素特征进行更完善的描述,使分类精度得到提高,如果在尺度要素特征提取时直接使用原始图像,噪声干扰大、数据量庞杂的原始图像会对提取结果造成影响[5]。
在城市空间环境中,尺度要素分布情况复杂,每种尺度要素都有适合自己的尺度,在进行尺度要素信息提取时如果使用统一的尺度层次就无法得到精准的影像信息[6]。以建筑物为例,不同的屋顶颜色及材质会造成不同的光谱差异。在影像上会呈现出不同的建筑物尺度要素。
基于上述分析,本文利用机器视觉设计城市空间尺度要素特征提取系统,实现空间尺度重要要素的特征提取。
1 城市空间尺度要素特征提取系统设计
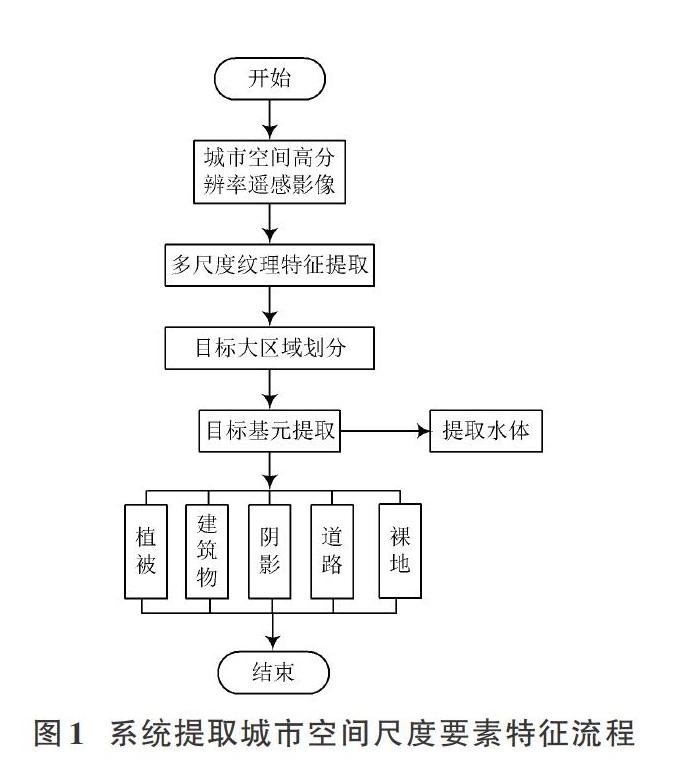
使用高分辨率遥感影像,把城市空间尺度要素分别划分为植被、水体、阴影、建筑物、道路、裸地六部分,系统对这六部分进行尺度要素特征提取,提取流程见图1。
使用灰度发生矩阵提取纹理特征,采用决策树分类法展开监督分类,根据已有研究,对高分辨率遥感影像中的大区域进行划分,将城市的空间尺度要素特征提取出来。
1.1 多尺度纹理特征提取
在城市空间中,灰度的分布不断交替变化形成纹理,在遥感图像中空间灰度呈现相关特性,这是由于在空间中,一定距离间隔的两个像素存在灰度关系。在对纹理特征进行描述时常常使用灰度共生矩阵,遥感影像内任意两个点之间的灰度空间相关特性通过矩阵呈现,该矩阵是由影像内的灰度值之间的二阶联合条件概率密度组成的[7?8]。使用灰度共生矩阵分析纹理时需要对移动方向、移动窗口大小以及移动步长这三个参数加以考虑。多尺度纹理特征提取时移动方向选取30°,移动步长取值为2,移动窗口大小选取4×4,6×6,…,26×26。在对纹理特征进行统计时,以均匀性、非相似度、均值、熵、方差、相关度、均匀性、角二阶矩等统计量来描述。
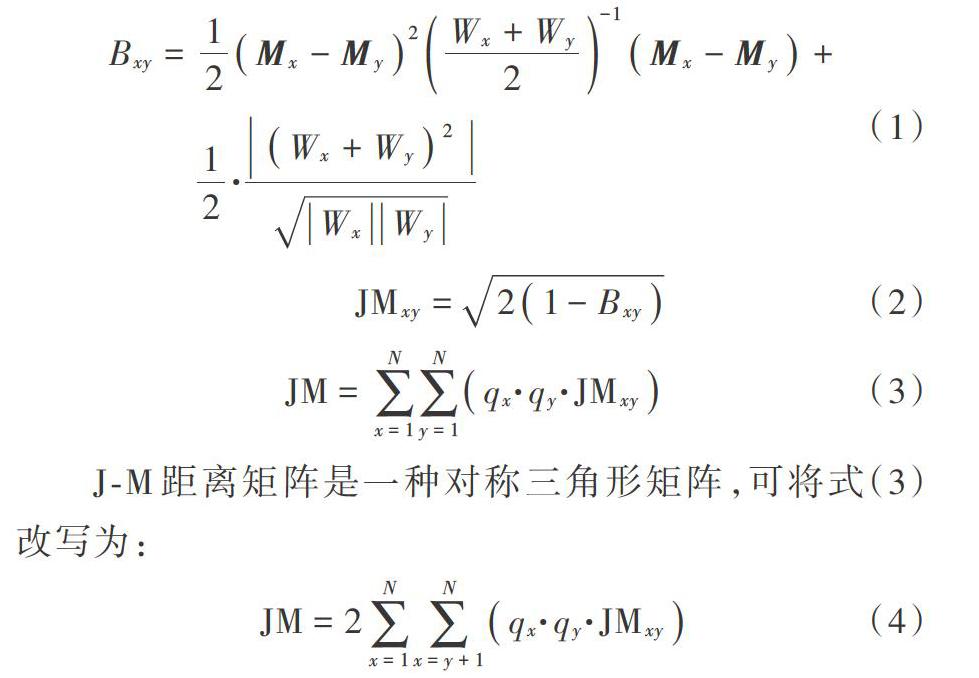
不同地物类型的纹理特征伴随着纹理窗口大小的变化呈现的表达程度不同,地物类型纹理尺度对分类的影响很大。为了纹理尺度在优化后的分类效果能够达到良好的程度,对各类别地物之间的可分离性进行表达时运用平均J?M(Jeffries?Matusita)距离。J?M距离表达式如下:
式中:[Wx]表示类别[x]的矩阵样本协方差;[Wy]表示类别[y]的矩阵样本协方差;[Mx]和[My]分别表示[x]和[y]的样本均值向量;[JM]表示平均J?M距离;[qx]和[qy]分别表示[x]和[y]的先验概率;[JMxy]表示这两个类别之间的J?M距离;[Bxy]表示纹理特征因子;[N]表示阈值。
按照以上公式,选取样本进行训练,随着纹理尺度的变化,平均J?M距离也产生变化。以下纹理窗口中尺度要素类型平均J?M距离最大:建筑物和裸地的纹理窗口是6×6,道路和植被的纹理窗口是8×8,水体的纹理窗口是16×16,阴影的纹理窗口是4×4,若要各种尺度要素的平均可分离性呈现较小的状态,则纹理窗口值需达到21×21。
1.2 决策树分类法
决策树分类法在遥感影像分类领域优势明显,运算效率高,清晰且灵活,应用范围广泛,每个决策树的组成都需要一整个内部节点、单一根节点、大量分支节点和无数叶节点。在整个决策过程中,任何需要测试的属性都来自决策树的每个内部节点,测试的结果可由各分支表示,图像分类结果以各叶节点表示。
以CART算法作为决策树构建算法,该算法结构清晰、运算简单、处理数据时高效迅速。节点的分割规则是以各属性最佳分割点作为各节点的选择,在此节点分割出的两个节点基础上再次分割,按照这个规律不停分割,直到无法分割为止,通过该算法得到的决策树称为二叉树,原因是各节点都存在两个分支。
使用多尺度纹理特征提取和决策树分类法得到的城市遥感影像分类结果,对城市空间尺度要素中的水体、建筑、植被等特征进行提取。
1.3 尺度要素特征提取
1.3.1 水体特征提取
若要得到城市空间水体特征,需要在城市遥感影像分类结果基础上,通过大区域分割方法获得。使用直方图阈值分割方法对水体进行特征提取以解决水体灰度值过低不利于提取的问题。水体分割阈值的确定需要使用直方图判定,该直方图通过人机交互水体分割阈值获得,阈值是与灰度直方图内第一个峰相对应的波谷[9]。通过求出曲线极小值确定波谷,极小值的确定条件为:同时符合一阶差分和二阶差分分别等于0和大于0。综上所述,特征提取方法步骤如下:
1) 以直方图统计原始影像数据,将得到的数据以N级灰度划分。
2) 对步骤1)中得到的原始直方图展开中值滤波处理,去除直方图中的毛刺[10]。
3) 为排除局部抖动导致的误差,对已经去除毛刺的直方图继续进行平滑处理。
4) 以一阶差分[d′c=dc+1-dz]处理经平滑处理后的直方图,对一阶直方图从左到右检测,其中,第一个从负转变到正的跃阶点即为波谷点,阈值[N]是在一阶直方图内检测到的与极小点相对应的灰度值。
(5) 对原始图像进行分割处理,将小于阈值[N]的像元设置为水体,大于阈值[N]的像元判定为水体以外的尺度要素。
经过以上5个步骤可以提取出城市空间尺度要素中的水体特征,经矢量化处理得到多边形水体区域。
1.3.2 建筑物特征提取
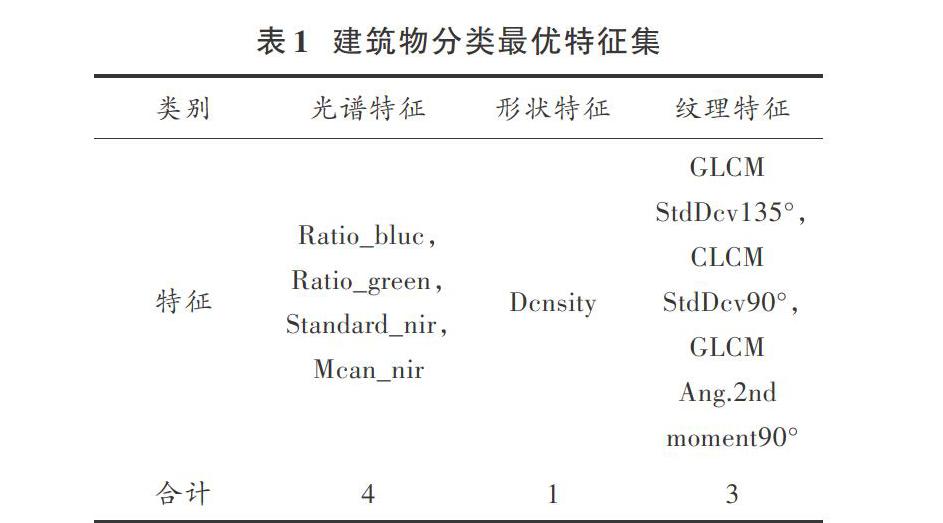
按照建筑物屋顶颜色不同可以划分为蓝色、灰色、红色3种。将每两个相邻影像中的相对边界和距离添加到纹理特征中,与光谱特征、形状特征组成建筑物影像分类的原始特征子集。决策树分类法的学习器有两个重要的调整参数[11?13],分别为修剪叶节点的置信系数[K]和节点需求实例中的最小数量参数[O],这两个调整参数的取值对分类结果起到重要作用,所以取值时要经过参数寻优处理。最小数量参数[O]和置信系数[K]取值分别为1~9和0.1~0.6,步长分别为1.5和0.5。优化决策树得到最优特征集,见表1。优化后的最小数量参数[O]和置信系数[K]分别为4和0.2。
1.3.3 植被特征提取
植被区域属于块状基元,提取植被区域特征时一般需要使用影像中的纹理信息,特征提取方法如下:
1) 纹理参数分割。灰度共生矩阵通过高分辨率遥感影像生成,遥感影像和矩阵计算得出的5个纹理参数一起进行分割计算[14?15]。
2) 数字形态学处理。为了消除影像中的斑块和斑块周围的毛刺使得影像中的背景和斑块形成鲜明对比,对分割后的二值图像进行数学形态算子处理。
3) 特征矢量化。以矢量化处理目标图像,单元形状设置为多边形,计算形状指数,提取出植被区域。
1.3.4 道路、阴影、裸地特征提取
运用数学形态学和边缘检测对道路、阴影、裸地基元进行提取,采用多尺度纹理特征提取高分辨率遥感影像的道路、阴影、裸地特征,利用决策树分类法得出道路、阴影、裸地斑块,使用启发式连接规律连接道路的轴线,提取出道路、阴影、裸地区域特征。
2 实验分析
为了验证基于机器视觉的城市空间尺度要素特征提取系统的整体有效性,需要对该系统进行对比实验。实验前提取辽宁省沈阳市城区内某区域的城市空间尺度要素特征数据,用于对比验证本文系统的有效性,得到的实验结果如下。
2.1 尺度要素特征提取效果对比
首先检测不同系统方法的空间尺度要素特征提取效果,图像越清晰,提取效果越好。实验结果如图2所示。
从图2a)中可以看出,在采用本文系统提取到的空间尺度要素中,可以清晰地提取出道路区域,同时其他小面积区域也能清楚地得到体现,这是因为该系统采用多尺度纹理特征提取方法和决策树分类方法,能够更加清晰地获取道路等不同事物的纹理特征,并保证道路特征不会与光谱相似的建筑物混淆,分类精度得到提高,总体效果较好。通过图2b)可知,城市地理信息系统提取的空间尺度要素特征破碎,图像十分模糊,道路特征展现出断断续续的形态,且与建筑物特征出现大面积混淆,阴影和水体不能明显区分,大量建筑物被判定为道路和植被。
通过以上数据可以证明,本文系统提取的空间尺度要素特征精度较高,提取性能更好。
2.2 尺度要素特征提取精度对比
为进一步验证不同系统方法的特征提取有效性,对两种系统处于不同信噪比下的特征提取精度进行了检测,结果如表2所示。
2.3 尺度要素特征提取时间对比
由图3可知,城市地理信息系统的空间尺度要素特征提取时间在3~6.8 s之间,波动范围较为明显,而本文系统的空间尺度要素特征提取时间始终低于2 s,时间较为平稳。特征提取时间越短,表明方法的提取速度越快,效率越高。通过以上数据可以证明,本文系统的空间尺度要素特征提取效率更高,实际使用价值更高。
3 结 论
将本文系统空间尺度要素特征提取与城市地理信息系统空间尺度要素特征提取进行对比,城市地理信息系统所提取的尺度要素十分模糊,且斑点更多,混淆信息更多。在对两个系统添加不同信噪比后对比特征提取精度,本文系统提取的各尺度要素平均精度均在95%以上,而城市地理信息系统提取的各尺度要素平均精度均在90%以下;本文系统的空间尺度要素特征提取时间始终低于2 s,而城市地理信息系统的空间尺度要素特征提取时间在3~6.8 s之间,证明本文系统实际应用性能更优秀。在今后的研究中,可从解决尺度要素混淆的角度出发,使用辅助或者优化方法,提升提取精度。
参考文献
[1] 吴志强,叶锺楠.基于百度地图热力图的城市空间结构研究:以上海中心城区为例[J].城市规划,2016,40(4):33?40.
[2] 王钊,杨山,王玉娟,等.基于最小阻力模型的城市空间扩展冷热点格局分析:以苏锡常地区为例[J].经济地理,2016,36(3):57?64.
[3] 张少康,刘沛,魏冀明.基于风环境分析的珠三角地区城镇空间规划引导[J].规划师,2016,32(9):118?122.
[4] 殷明,庞纪勇,魏远远,等.结合NSDTCT和稀疏表示的遥感图像融合[J].光子学报,2016,45(1):10?17.
[5] 周福送,霍宏,万卫兵,等.基于强监督部件模型的遥感图像目标检测[J].计算机应用,2016,36(6):1714?1718.
[6] 李建,周屈,陈晓玲,等.近岸/内陆典型水环境要素定量遥感空间尺度问题研究[J].武汉大学学报(信息科学版),2018,43(6):937?942.
[7] 徐磊,董捷,李璐,等.基于功能分区视角的长江中游城市群国土空间特征及优化[J].经济地理,2017,37(6):76?83.
[8] 侯俊剑,吴艳灵,何文斌,等.基于三维声场空间特征的故障诊断方法研究[J].振动与冲击,2018,37(13):1?6.
[9] 李建,周屈,陈晓玲,等.近岸/内陆典型水环境要素定量遥感空间尺度问题研究[J].武汉大学学报(信息科学版),2018,43(6):937?942.
[10] 段建民,石慧,战宇辰.基于机器视觉筛选GPS卫星信号的无人驾驶汽车组合导航方法[J].电子技术应用,2016(1):111?114.
[11] 吕志强,邓睿,卿珊珊.大型山地城市建设用地空间扩展及地形分异[J].水土保持研究,2017,24(1):232?238.
[12] 唐燕妮.基于机器视觉的陶瓷大花瓶内表面裂纹自动检测系统研究[J].陶瓷学报,2016(4):417?422.
[13] 和伟康,苏向辉,马瑛,等.乌鲁木齐市产业结构与城市空间形态耦合及响应关系研究[J].中国农业资源与区划,2017,38(9):98?105.
[14] 张纯,夏海山,宋彦.轨道交通带动下的城市形态演变:以北京为例[J].城市发展研究,2016,23(9):107?112.
[15] 李在军,张雅倩,胡美娟,等.基于最低成本?周期模型的昆明市空间形态演变研究[J].长江流域资源与环境,2016,25(5):708?714.



