黄 伟
(河南城建学院,河南 平顶山467036)
0 引 言
随着数字时代的到来,数码成像技术不断提升,数字影像被普遍应用。数字影像又可以称为数字图像,是一种数字化的影像,其本质是一个二维矩阵,矩阵中的每一个点称之为像元[1-2]。当前的数字影像大部分使用的都是三维图像。在将二维平面图像转化为三维图像时,通常使用建模的方式完成工作,但时常出现图像不完整或是图像破损的状况,因而需对其进行重建。在以往的研究中,部分学者设计了应用于三维数字影像的重建系统,但在使用的过程中,会出现图像失真不完整的状况。针对上述情况,设计一种新型三维数字影像重建系统。在此次设计中引用视觉传达技术,提升三维影响的重建精度。
视觉传达是一种人与人之间利用视觉观看形式所进行的交流,是通过视觉语言进行表达传播的方式[3-4]。其包含视觉符号与传达两方面的概念。通过在影像中设定视觉符号,将其通过设计者的思想传达至观看者,使观看者成为设计者思想的受众。引用视觉传达技术,对于三维影像的细节部分重建具有极大的辅助作用。在此次研究中,将针对重建系统中的视觉传达技术部分进行重新优化设计,为系统性能的实现提供基础。
1 硬件设计
针对数字图像处理的各个环节特性重新设计系统硬件部分,主结构包括三个部分:影像采集层、影像处理层、影像重建层。三维数字影像重建的初始数据是一种在同一时间点采集得到的深度数据与色彩数据对比并融合的结果[5]。在原有的重建系统中配置了相应的彩色摄像头,为保证采集到的初始信息适用于视觉传达技术,在原有的基础上引用深度摄像机完成深度数据的获取。在此次设计中,将应用红外实感摄像头,具体图像如图1所示。

图1 红外实感摄像头
红外实感摄像机通过结构光原理及三维测距获取影像的深度信息,将深度信息转化为深度图像[6-7]。实感摄像头传感器如图2所示。
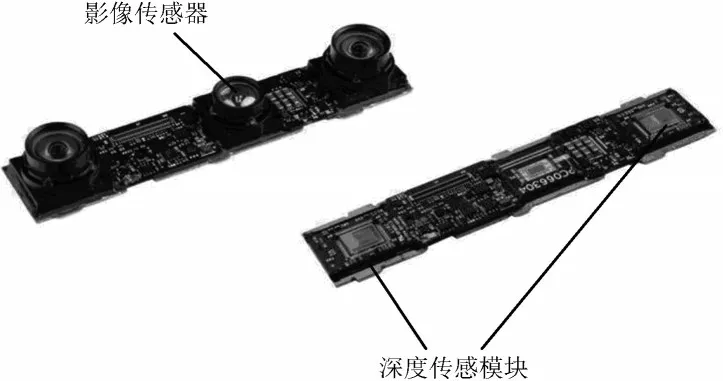
图2 实感摄像头传感器
深度图像易受到物体表面遮挡与材质的影响,获取后需要完成图像信息的预处理。表1为本文系统对选用的摄像头进行参数设定。
以上参数作为摄像头的选取依据,将选取后的设备安装至原有系统中。将采集后的图像传送至图像信息处理设备中,原有系统图像信息处理设备无法完成深度信息的处理,为此选用了新的处理器,具体如图3所示。
此次设计采用塔式处理器[8]完成对图像信息的处理工作,处理器内部参数如表2所示。
采用以上参数完成其设备内部设定,将其与深度摄像头之间进行连接,保证数据直接发送至信息处理设备中,以此提升数据的完整度。将连接后的设备与原有系统进行连接,此次设计中的硬件设备构建完成。
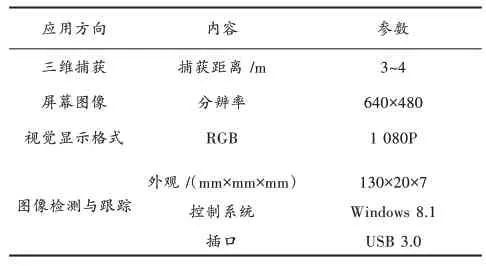
表1 实感摄像头参数设定

图3 图像处理设备
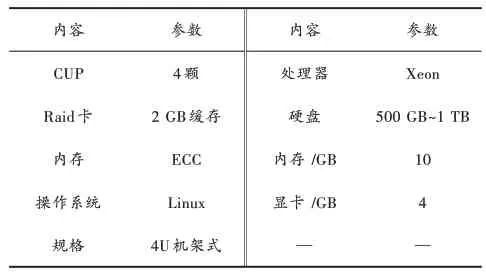
表2 图像处理设备参数
2 三维影像重建视觉传达优化系统设计
引用视觉传达技术实现原有系统性能的优化,针对影像完整度较差的问题完成系统软件优化设计。
2.1 引用视觉传达技术完成影像处理
使用图像滤波技术对实感摄像头获取到的图像信息进行处理,引用高斯滤波模型[9]估算未处理像素的像素值,采用点云技术将与之相似的像素点进行计算。在图像滤波过程中,设定先验条件对像素的加权大小,保证图像边缘结构的完整,有效结合深度图像的特征,获取处理后的完整图像。
在原有系统中,将处理后的图像直接建模完成三维影像重建,重建精度较差。此次设计中,将视觉传达技术引用至图像处理过程中,在处理后的图像中设定多种视觉符号[10],通过符号对处理后的图像进行分类存储,设定专用的文件,提升重建时图像处理的精度与速度。在视觉符号的设定中,注意图像的格式,保证符号使用于处理后的图像中,以此作为特征点提取的基础。
2.2 提取影像特征点
使用处理后的图像,采用SIFT特征点提取技术[11]提取特征点。
首先,构建三维尺度空间,对不同尺度因子的高斯函数与图像进行卷积运算,形成一系列不同尺度和图像像素的图像,设定尺度空间为A(x,y,∂),原始图像为B(x,y),高斯函数为C(x,y,∂),则有:

式中∂为尺度空间因子。设定其成倍增加,每一个值都有对应的图像,将这些图像组成一个高斯金字塔,对金字塔进行特征提取,设定其极值点为图像的特征点,通过DOG定义体现,则有:

式中n为尺度收缩因子[12]。在式(2)的结果中寻找极值点,该点为图像的特征点。对获取的特征点进行匹配,计算其一致性,得出影像重建的关键点,完成三维数字影像重建工作。
2.3 数字图像重建
采用以上获取的特征点,运用原有系统重建技术实现三维数字影像的重建。在重建中使用的是设定视觉符号后的图像信息,以保证其重建的完整度。三维数字影像重建流程如图4所示。
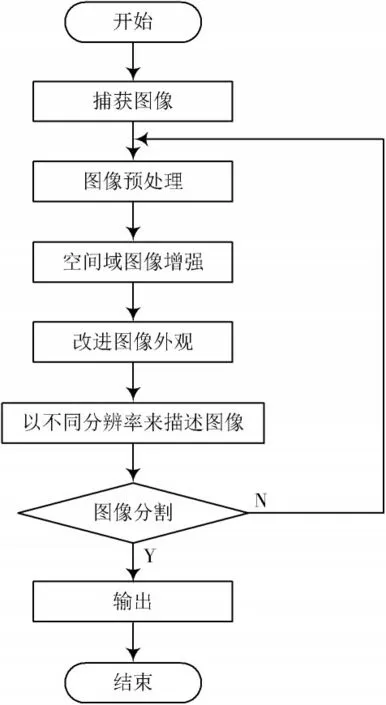
图4 三维数字影像重建流程
在原有三维数字影像重建系统的基础上,引用视觉传达技术,以保证此技术在三维影像重建系统中应用的可行性,具体的流程设计为以下步骤:
1)输入图像后,捕获原有图像;
2)对图像进行预处理,使得图片比原始图像更适合处理和操作;
3)对图像空间域缺失部分进行补充,增强原图像的空间域;
4)改进图像的外观,在步骤3)基础上进一步优化;
5)分别用不同分辨率来描述图像,并配合图像自适应出最适合的分辨率;
6)对分辨率描述后进行图像分割;7)完成图像处理,输出新的图像。
通过上述流程实现三维影像的重建,将重建后的特征点集合设定为u,S为重建后的三维影像图像矢量,原始图像特征点为p,在重建后的影像中具有一点重合,对其精度运算时不计入重合部分,则有公式:

式中n为三维影像截面。通过式(3)完成对重建三维影像精度的计算。重建后,三维影像误差不超过0.1%为合格。
将上述软件与硬件相结合,以完成基于视觉传达的三维数字影像重建系统设计。
3 系统性能测试
为验证所设计的基于视觉传达的三维数字影像重建系统的可行性,设定系统性能测试环节,通过对比重建后的影像完整度来判断其可行性。
3.1 测试环境
此次测试以重建结果构建三维重建平台,以影像编辑工具、3D制作设备以及专业引擎为基础,以C语言为平台开发语言,采用多构架网络对图像数据进行传输,保证其时效性与完整性。编辑器选用高集成性设备,提升重建的运转速度。具体平台如图5所示。

图5 影像重建测试平台
运用以上平台完成对原有与本文设计系统的测试。
3.2 测试样本
为提升测试的有效性,此次实验设定5组样本,对其展开重建,获取的重建结果如表3所示。
3.3 结果分析
完成测试过程,测试结果见表4。
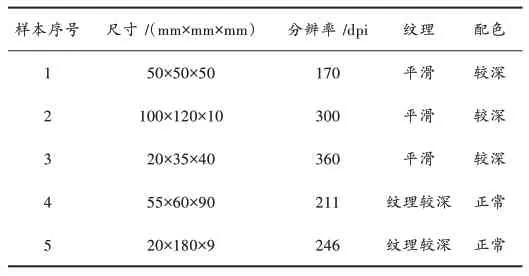
表3 样本重建结果
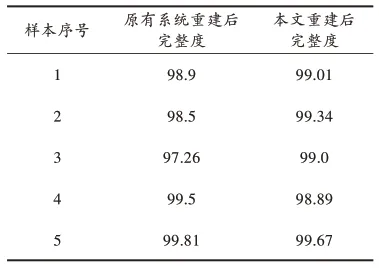
表4 测试结果对比 %
由表4可以看出,使用本文设计系统对三维数字影像进行重建后的结果完整度明显高于原有系统重建后的结果,且完整度较为稳定,而原有系统波动较大。通过对比可知,原有系统的纹理和配色与样本相差较大,本文重建结果与样本较为一致。可见,基于视觉传达的三维数字影像重建系统性能与精度优于原有系统。
4 结 语
本文设计的基于视觉传达的三维数字影像重建系统提升了三维数字影像重建结果的完整度,重建效果远优于原有系统效果。由此可知,在图像重建的过程中,引用视觉传达技术设定相应的视觉符号,有助于提升重建结果的精度。将本文设计系统应用于现实生活中,可有效促进相关行业的发展。



