万 婷,马宇航
(东北林业大学,黑龙江 哈尔滨 150040)
0 引 言
城市新区是具有城市功能与特性的新建区,近年来城市的跨越式发展成为扩展城市空间的重要方式。与国外的城市新区建设工作相比,国内城市新区的建设实现了与主城区的有机联系,是作为城市发展的新空间而独立存在。城市新区的建设目的是疏散成熟主城区中的人口,降低人口密度和缓解城市压力,并实现对农村人口数量的截流[1]。慢行作为交通方式的一种,是城市新区道路交通联系的重要纽带。慢行主体是指参与慢行活动的人,主要是指采用步行、非机动车和公共交通工具作为出行方式的人。提倡慢行交通方式不仅可以改变人们的出行方式,促进居民的身体健康和心理健康,同时可以改善住宅区的自然环境和公共空间环境。慢行交通系统具有生态性、连续性、延展性等特点[2]。目前,国内外针对城市新区的慢行交通系统研究工作已经取得了许多较为成熟的研究成果,但传统的城市慢行交通系统存在秩序混乱、公共自行车租赁点不足、自行车停放问题突出以及人本思想尚未落实的问题。为了解决上述问题,本文提出结合可达性的概念实现对城市新区慢行交通系统的优化设计。可达性的研究可分为个体微观角度和宏观角度两个研究层面,其实质就是用来反映某个个体到达目标位置的难易程度。通过转变传统交通规划系统的基本原理和视角,以提高慢行交通的可达性作为交通系统的设计目的,从而有效地把控城市新区交通发展历程和趋势。另外,综合可达性可实现对慢行交通系统的优化设计,可以摒弃传统的被动型交通系统设计与规划方式,将其转变为主动交通设计与规划。
1 城市新区慢行交通硬件系统设计
城市新区慢行交通系统的设计目的是结合当地城市交通的发展现状,努力打造一个与地区发展相适应、与公共交通良好衔接的交通系统,从而实现安全、便捷的慢行交通系统[3]。在慢行交通系统的设计过程中,要与城市新区的功能、布局形态以及土地利用相协调,符合可持续发展的要求,从而建立与对外交通体系相配合的内部交通系统。城市慢行交通系统应负荷网络、空间、安全性以及无障碍等多个方面的要求,通过交通调价、需求预测以及交通规划等多个步骤,实现对城市新区慢行交通系统的设计。
此次系统设计是在传统慢行交通系统的基础上,以提高交通可达性为目的,进行的优化设计。系统的设计过程分为硬件、数据库和软件三个方面。其中,硬件系统主要用来显示城市新区慢行交通系统的设计结果,并采集实时的交通信息数据,为软件功能的实现提供精准的初始数据[4];数据库主要用来记录慢行交通的可达性,为慢行交通系统软件功能的实现提供可达性约束条件。而软件系统主要就是用来实现对城市新区慢行交通的规划与管理。硬件系统的基本结构如图1所示。

图1 硬件系统架构图
由于慢行交通系统的主要针对对象为步行行人、非机动车和公共交通工具,因此,安装的硬件设备主要针对的是慢行交通的受众人群。由图1中可以看出,城市新区慢行交通硬件系统可以分为车位地磁探测模块、超声波位置探测模块、语音卡模块、通信网络模块以及数码显示模块等。其中,车位地磁探测模块针对的是公共交通设备、超声波位置探测针对的是非机动车设备和步行行人,而其他三个模块主要是作为软件功能的输出模块,实现对交通的规划管理。
1.1 核心通信网络模块
选择Mesh标准拓扑作为核心通信网络的拓扑结构,并利用ZigBee协议定义了协调器、路由器和终端节点三种类型的网络设备[5]。在核心通信网络环境中安装服务器装置,并内嵌一个型号为CC2530的芯片,由于该芯片中的主要运行内核不同,因此,相比于传统芯片处理指令的速度更快,可以实现数据的并行访问和寻址操作。由于城市新区的占地面积较大,传统的通信网络难以实现对交通区域的全面覆盖,为此,需要对通信网络进行扩展处理,在安装的CC2530芯片外围连接一个型号为CC2591的芯片,两个芯片的连接结构如图2所示。
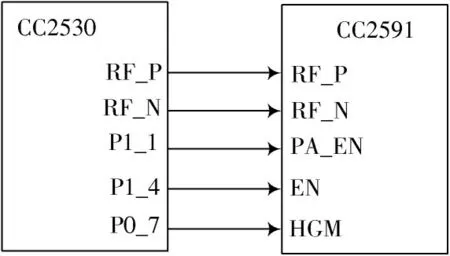
图2 通信网络中芯片连接图
由图2中可以看出,通信网络中两个芯片主要依靠5个管脚进行连接,其中,CC2591芯片的控制逻辑结构如表1所示。
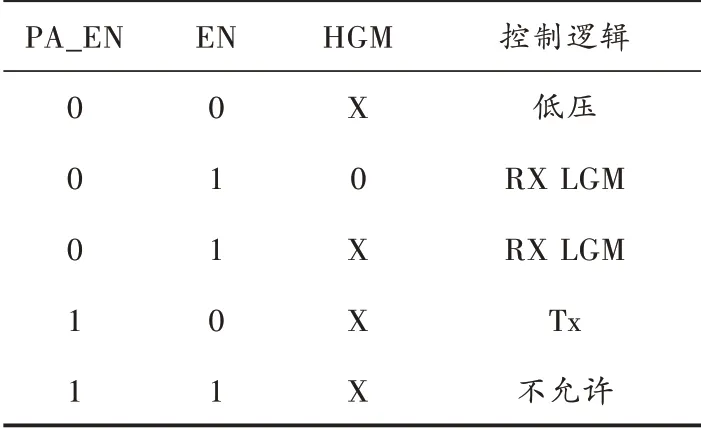
表1 CC2591芯片管脚控制逻辑表
考虑到城市新区慢行交通网络环境中的节点数量较多,传统网关的功能较为单一,因此,网关部分选用STM32FI03RDT6芯片。该芯片最高工作频率能够达到96 MHz,基本满足服务器芯片的接口使用要求。由于该芯片具有较大的可扩展性,因此,也方便进行网关功能的进一步扩充和完善[6]。
1.2 车位探测模块
车位探测模块主要实现对城市新区中公共交通车辆信息的探测,将车位的实时状态上报给系统服务器,同时利用硬件显示设备显示实时车位的状态信息[7]。车位探测主要利用地磁检测原理,安装PNI11096芯片和磁电感传感器,通过SPI总线的驱动,使产生的交流信号产生阻抗变化来测量电感,再通过电感信号的变化情况从而判断目标车位上是否有车辆停留。
1.3 慢行交通显示模块
城市新区慢行交通硬件系统中的显示模块,使用共阴极数码管,并在数码管与发光二极管之间嵌入M74HC595芯片。将一组8位数据分别对应到芯片的输入管脚中,在SRCK管脚上输入一个上升沿,此时数据寄存器中的所有相位均将原始状态转移到下一位,实现对单一数据的存储,最后在RCK管脚上输入一个上升沿,便实现对输入数据的输出[8]。利用上述显示原理,将慢行交通软件系统与显示模块相连,从而实现对慢行交通实时画面的输出。
2 城市新区慢行交通系统数据库设计
慢行交通系统数据库主要是用来存储城市新区当前的慢行交通数据,并将其作为交通规划的参考数据,从而保证慢行交通的可达性。数据库中需要存储的数据包括慢行交通道路数据、空间单元属性以及空间可达性等。其中,慢行交通的道路数据属性如表2所示。
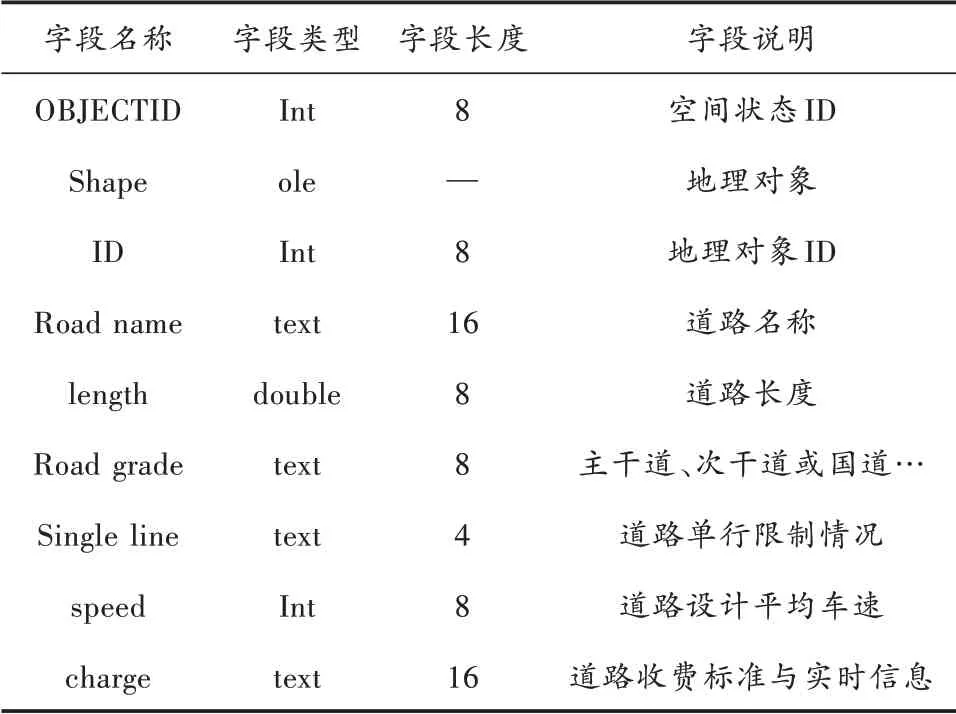
表2 慢行交通道路数据属性表
同理可以得出其他系统数据库表的具体设计结果,综合慢行交通的基本特征,设置不同道路类型与不同连接情况下的可达性,并在系统的软件设计过程中作为功能实现的约束条件[9]。
3 城市新区慢行交通系统软件功能设计
在硬件设备和数据库开发的基础上,实现对城市新区慢行交通系统软件功能的设计。软件功能的设计需要保证慢行交通的连通性和安全性,并在可达性约束下实现软件功能的优化。
3.1 建立可达性下的交通与土地利用优化模型
城市新区的土地利用情况直接决定了城市新区的慢行交通量和交通方式[10]。城市新区中的交通系统和土地利用现状之间存在着相互联系又相互制约的关系,具体的作用关系如图3所示。
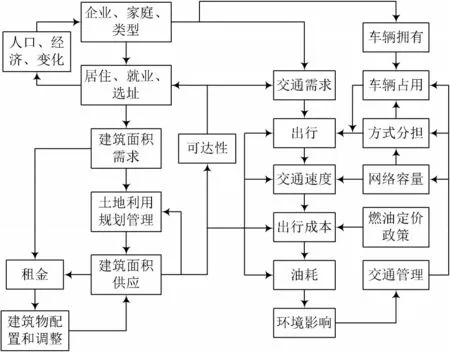
图3 慢行交通与土地利用的关系图
可达性的定量分析过程是与慢行交通和土地利用的反馈相联系的,慢行交通系统的可达性分析情况见图4。
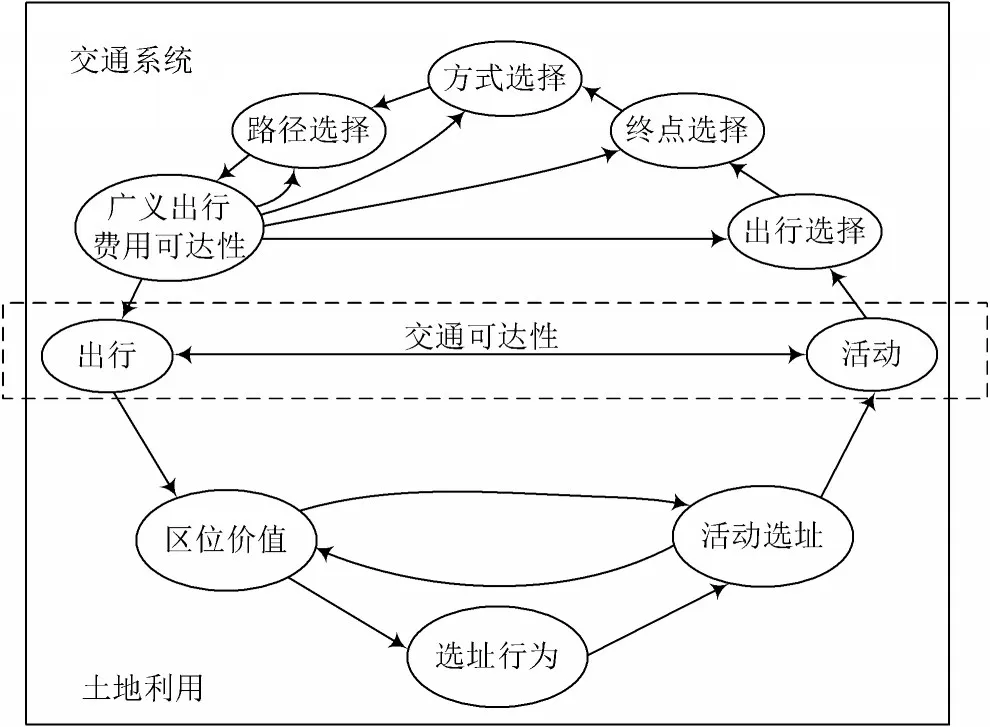
图4 可达性分析基本框图
在慢行交通系统的规划工作中,利用可达性实现与土地利用的共生机制,综合考虑城市新区的规模、人口密度和布局情况,协调好土地开发与慢行交通建设的关系。
3.2 城市新区交通生成预测
根据城市新区与土地利用关系的分析结果,预测出交通产生量,从而确定该地区交通量的预估结果。慢行交通总产生量的预测表达式为:
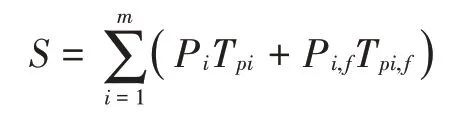
式中:m表示的是城市新区的单元区域数量;Pi,Tpi分别表示的是慢行交通区域中常驻人口的数量和人均出行次数,而Pi,f,Tpi,f分别为城市新区内流动人口数量和对应的人均出行次数[11]。
3.3 划分慢行单元区域
为了体现城市新区内慢行交通在空间上的差别化发展要求,需要对城市新区内的慢行区域进行划分。慢行交通结构中的步行道路的尺寸范围[12]是500~1 000 m。结合自然屏障和高快速道路的划分规则,可以得出城市新区内慢行区域的划分结果。
3.4 慢行交通布局设计
在顺应城市地貌地形,满足交通建设要求,减少交通的工程量的前提下,从道路、设施等多个方面实现对慢行交通的布局。从宏观角度来看,慢行交通系统由步行道路交通系统、自行车与低速助力车组成的非机动车系统、公共交通系统三个部分组成。其中,非机动车可以分布在机动车道两旁,也可以分布在人行道上,采取隔离护栏或彩色沥青铺设等方式区分非机动车道与其他车道[13]。人行道的宽度应能满足高峰时段行人通过的需求,扣除树池、灯杆以及交通标志等设施,人行道的布置形式如图5所示。图5中:1为步行道;2为车行道;3为绿带;4为散水;5为骑楼。
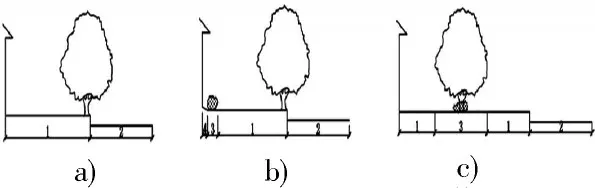
图5 人行道布置形式示意图
由于人行道和非机动车道的短距离出行特征决定了慢行交通系统不可能像城市新区其他交通方式一样独立服务于出行功能,因此,需要与城市的公共交通系统进行合理的衔接,实现慢行交通的出行目的。一般来讲城市新区居民步行的可接受出行距离[14]为400~600 m。那么将公共交通与步行出行方式相结合,可以极大程度地提高步行的舒适范围。在公共交通站点的换乘设计过程中,需要考虑到非机动车道的运行情况,结合车站周边环境,尽量避免布置在建筑正面[15]。除了道路之外,还需要对慢行节点、慢行岛、慢行景观、交通设备进行设计,得出城市新区慢行区域的整体布局。最终将城市新区慢行交通的布局结果投入到实际的城市规划工作当中,通过对交通的管理与控制实现城市新区慢行交通系统的软件功能。
4 系统测试
此次系统测试的实验目的是测试设计的基于可达性的城市新区慢行交通系统的运行功能和应用性能,其中,应用性能主要针对的是系统的可达性。为了形成实验对比,除了设计的基于可达性的城市新区慢行交通系统外,还需要设置传统的慢行交通系统和文献[4]中提出的城市城区慢行交通系统作为此次实验的两个对比系统。其中,传统系统就是利用一系列数据采集技术,收集城市新区的道路信息,并通过手动计算的方式确定交通的可达性,从而实现对城市新区慢行交通道路的布局与衔接。而文献[4]中提出的慢行交通系统,在传统系统的基础上,优化了硬件设备,并统计和分析了城市新区居民的出行特征,以此作为慢行交通系统规划的参考标准。将三个慢行交通系统应用到相同的实验环境中,利用区域演化的手段分别观察交通系统的规划、运行情况,并统计计算不同系统下的交通可达性。
4.1 准备实验环境
此次选择的城市新区实验对象位于中国东南地区,城市新区的行政面积为778 km2,其实验环境具有较好的地理位置,是沿江生态城市建设的重要组成部分,此次绘画研究的范围如图6所示。
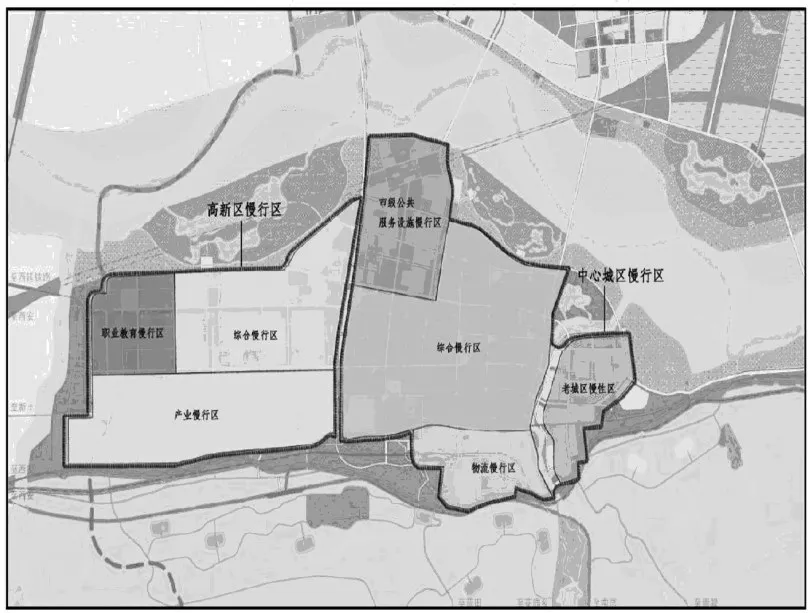
图6 实验环境的区域现状
当前实验环境中的综合交通分为城市快速路、城市次干道两种类型,区域内现存一条1.5 km的健身步道,全程步行时间大约为30.6 min。该慢行人行道的标高约为9.2 m,路面宽度约为38 m。在慢行交通环境中,还存在部分景观环境和公共服务设施。
4.2 设置测试指标
此次实验主要从功能和性能两个方面进行具体的测试分析,因此,设置的测试指标分为功能性指标和性能测试指标,其中,功能性指标为交通系统规划的成功率,即生成人行道、非机动车道、公共交通道路等部分的规划成功率,另外,性能测试指标为交通的可达性。然而可达性指标属于定性指标,因此,在实际的测试过程中需要对其进行量化处理。
4.3 系统功能测试
通过城市新区慢行交通系统的运行,分别得出对应的交通道路规划结果,如表3所示。
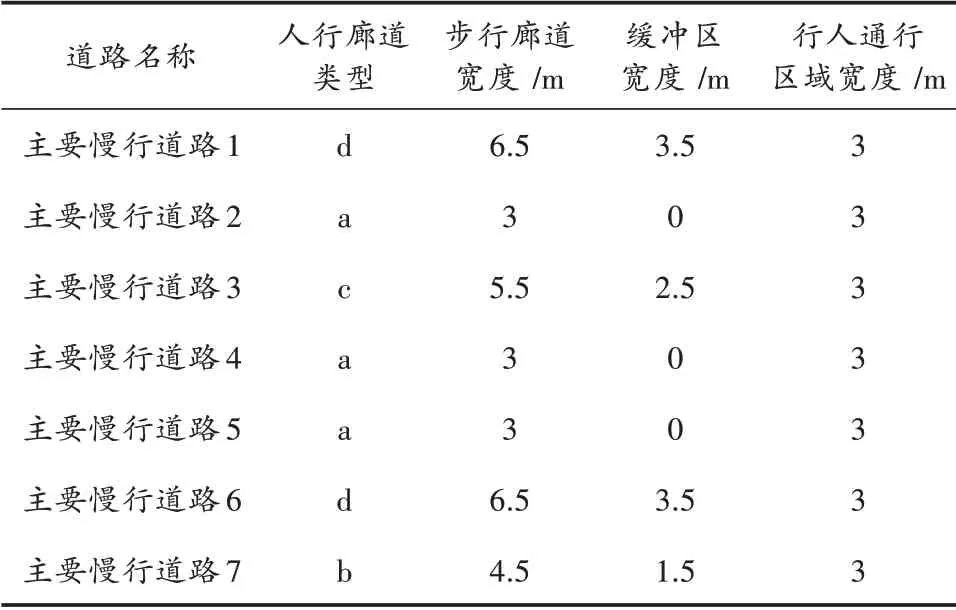
表3 城市新区慢行交通设计结果
由表3中可以看出,设计的慢行交通系统可以有效地实现对交通道路的规划,并显示出对应的规划结果。对系统中交通标志、慢行岛、慢行景观等方面的规划与管理,均能顺利实现。由此可见,设计的城市新区慢行交通系统的运行成功率符合设计标准。
4.4 系统可达性能测试
在系统可达性性能测试的过程中,首先,需要对可达性进行量化处理,分别设置距离、相对可达性系数、供需比、机会可达性等指标。其中,距离量化指标以交通网络的最短距离为依据,计算最近吸引点与目标位置之间的最短距离之和,而相对可达性系数可以直接反映出交通网络中各个节点相对通达关系水平的高低,机会可达性是交通系统中任意一个节点在特定阻抗阈值内所能达到的人口活动数量。综合上述,指标用来实现对可达性的量化,分别将三个慢行交通系统应用到实验环境中,得出对应的可达性性能测试结果,其中,设计系统的性能测试结果如图7所示。
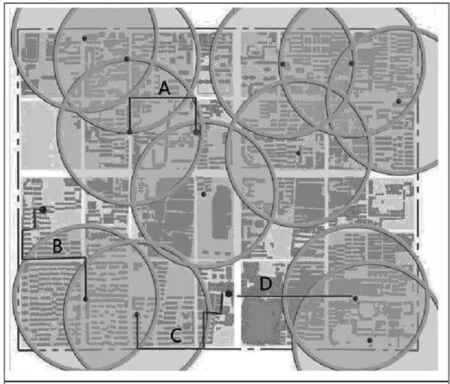
图7 超市步行可达性分析
综合各个可达性量化指标,得出不同系统对应的可达性性能测试对比结果,通过数据的对比分析发现,传统系统和文献[4]提出的交通系统所对应的可达性综合指标值分别为0.95和6.77,而设计的城市新区慢行交通系统的综合可达性能测试结果为17.7,由此可见,本文设计系统的可达性性能更优,即应用性能更佳。
5 结 语
构成城市新区慢行交通系统的慢行设施、道路、景观环境的设计需要资金的投入支持。另外还需要制定城市新区慢行交通系统的管理相关规范,针对当前交通阻碍等违规现象进行监控,从而保证慢行交通系统的实现。



