郑 刚,张朝阳,俎兆飞,孔 祚
(1.上海应用技术大学,上海 201418;2.上海大丁自动化科技有限公司,上海 200240)
高级驾驶辅助系统(Advanced Driver Assistance System,ADAS)是一项重要的主动安全措施,在有效提高汽车安全性和舒适性的同时,也是向汽车自动驾驶终极目标迈进的必由之路[1⁃2]。近年来随着ADAS 技术的逐渐发展,测试需求也在不断增多,测试难度也越来越大[3]。因此,除了ADAS 新功能以及其核心算法的研究之外,如何通过有效的测试平台,验证ADAS 功能的安全性和可靠性,尽早地发现产品缺陷,使测试更加快速有效、开发时间变短且经济性好,已成为ADAS 的研究热点之一[4⁃7]。在环仿真测试验证是一种先进的汽车控制器开发和验证方法[8⁃9],基于仿真技术,硬件在环仿真技术通过仿真环境的界面,将实际运行状态的设备与仿真环境保持一致,并为了降低仿真环境与真实环境的差别,把真实世界的不确定性因素加载到仿真环境中,使仿真效果更加精确[10]。近年来,国内外对汽车ADAS 仿真测试进行了相应的研究。来飞等对比分析了汽车高级驾驶辅助系统在环仿真实验的四种研究方法,比较了各自的优点和缺点,指出硬件在环仿真测试在ECU 开发流程中占有非常重要的地位,但没有构建具体的测试平台[11]。余卓平等系统地总结了自动驾驶汽车测试技术的现状和应用,得出自动驾驶汽车测试技术发展的关键是测试方法和硬件在环,测试工具应着力发展硬件在环和整车在环平台[12]。S Moten 等提出了一个循环中的X(其中X:模型、软件、硬件及司机/人等)驾驶仿真平台[13]。张琦基于dSPACE 硬件在环测试设备,并结合某车型的ADAS 测试系统开发项目,对高级驾驶辅助系统硬件在环测试技术进行了理论研究,但测试软件版本和硬件搭建测试场景存在一定的局限[14]。
ADAS 的测试处于起步阶段,关于ADAS 开发测试需要进一步研究[5]。在现有ADAS 测试的基础上,本文引入硬件在环仿真测试方法,并结合实时虚拟仿真技术,设计构建ADAS 系统硬件在环测试平台。
1 平台架构
硬件在环测试对象为硬件ADAS 控制器,组成环的其他部分为软件和硬件,测试目的是在控制器ECU 上验证代码能否满足功能需求。整个ADAS 控制器硬件在环测试技术路线如图1 所示。
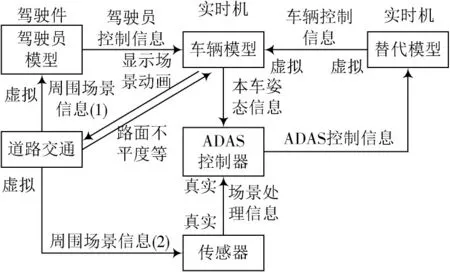
图1 ADAS 控制器硬件在环测试技术路线
系统的被测对象为ADAS 控制器真实集成硬件,传感器为真实摄像头或者毫米波雷达,系统可以采用CAN 通信模式实现整个网络的数据通信。车辆模型、替代模型以及道路交通场景等系统的运行环境都在实时仿真机中运行,测试人员可以通过驾驶件实时地对仿真车辆进行控制,并生成实时的仿真动画,便于测试人员测试。
硬件在环测试能够解决开发测试中被控对象没有开发完成时的控制测试问题,与实车测试相比,硬件在环测试在危险测试工况的安全性和复杂测试工况的测试可重复性上具有很大优势。硬件在环测试减少了实车测试的测试次数和测试强度,控制器的开发时间变短,经济性好[15]。根据图1 所示的硬件在环测试技术路线,基于dSPACE 仿真平台搭建硬件在环测试平台,平台总体框架如图2 所示。
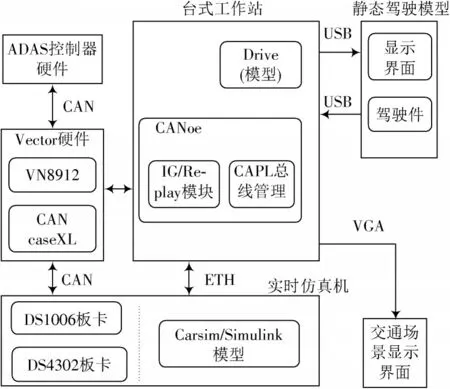
图2 ADAS 硬件在环测试平台
Simulink 模型能够建立功能丰富的数学计算,Carsim 软件具有车辆动力学仿真功能及强大的道路、交通物体仿真功能,总线调理功能强大的CANoe 软件,dSPACE 拥有仿真机成熟的硬件支持能力、高效的代码编译能力以及实时的硬件仿真能力,通过这些软硬件的搭建设计,可以高效地对ADAS控制器进行硬件在环测试。
2 平台设计
2.1 仿真测试环境软硬件
测试平台的仿真测试环境设计包括:车辆模型建立、道路交通场景建立、替代模型建立、驾驶模型建立以及实时仿真系统的建立。整体结构采用“上位机+目标机”的结构布局,模型建立及参数设定在上位机工作站完成,实时仿真在实时仿真机中完成。
软件方面:本文采用的Carsim 是一款成熟的车辆仿真软件,按照测试需求设定相关参数,可以非常方便地在Carsim 中搭建测试所需的虚拟车辆模型和道路交通场景。配置Carsim RT 的输入输出接口参数(本车及周边车辆的油门开度、刹车压力、转向扭矩、位置坐标、车速及加速度等)和对应的Simulink 替代模型,然后进行联合仿真。通过dSPACE⁃RTI 以及Matlab⁃RTW 接口的无缝对接,算法及I/O 接口得以定义,然后对整个仿真模型进行编译并生成对应的C 代码,烧写到dSPACE 硬件,然后利用dSPACE 测试软件ControlDesk、RealMotion 进行实时仿真。
硬件方面:驾驶模型由罗技G29 游戏驾驶件和由Simulink 搭建的驾驶控制模型联合仿真构成,输出油门开度、刹车踏板所受压力、方向盘转动角度以及按键信息(按键信息定义档位)等。dSPACE硬件采用RT1006运算器板卡、DS4302通信卡和DS814连接板卡,如图3所示。

图3 dSPACE 硬件图
整个联合仿真模型烧写入RT1006 运算器中进行实时运算,在Carsim/Simulink 联合仿真模型中配置DS4302 CAN 通信接口,实时仿真时,总线调理系统通过DS4302 板卡和DS1006 中运行的仿真模型进行CAN 通讯,DS814 用光纤连接DS1006 和PC 机。此外,显示模块为4块显示屏幕,与上位机相连,用来显示实时仿真动画及汽车仪表盘信息。驾驶件及显示屏幕如图4所示。

图4 驾驶件及显示屏幕
2.2 总线调理模块
平台的信号通信参照实车的通信模式,采用控制器局域网(Controller Area Network,CAN)通信方式。信号调理系统硬件使用VN8912、CANcaseXL 等CAN 硬件接口,由于测试平台的驾驶模型运行在上位机而非实时仿真机,CANcaseXL 硬件接口卡用来把真实驾驶件通过上位机运行的驾驶模型发出的虚拟驾驶控制报文信号发送到CAN 总线。所用VECTOR 硬件如图5 所示。
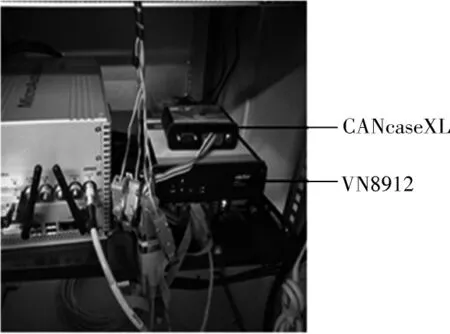
图5 VECTOR 硬件图
整个总线调理模块的设计分为四个部分:
1)根据整个测试系统的CAN总线结构,如图6所示,在CANoe当中搭建整个系统的节点网络,设定虚拟节点。

图6 CAN 总线结构
2)根据搭建的仿真节点以及整个仿真测试系统各模块的信号,通过CANoe 的内置软件db++创建整个系统的dbc 数据库。
3)基于CANoe 软件的内置的Panel Designer 组件,搭建驾驶件的虚拟仪表盘,主要用于显示仿真车辆的车速、刹车踏板和油门踏板、档位信息等。
4)CAPL 编程。CAPL 是CAN 总线开发的一种编程语言,对整车虚拟节点进行CAPL 编程的作用是能够仿真物理节点,实现整个测试系统的CAN 总线的仿真。
基于软件CANoe 设计的总线调理系统实现了整车仿真模型等虚拟CAN 总线和ADAS 控制器的真实CAN总线联合仿真,能够在整个仿真测试的过程中对各个部分的运行参数情况进行实时监控,对整车的相关报文信息值进行在线设定更改,对测试数据进行存储和离线回放,大大提高了整个虚拟测试系统的实用性。
2.3 ADAS 控制器选择
选择测试对象为某款量产ADAS 控制器,该款控制器已量产并配备与别克VELITE6 汽车。该款控制器基于摄像头传感器并集成MOBILEYE 图像处理方案,具备前碰撞预警系统(Forward Collision Warning,FCW)和碰撞缓解系统(Collision Mitigation Braking,CMB)。汽车前挡风玻璃上部的摄像头实时拍摄车前的路况信息,图像处理之后发送图像处理信息给ADAS 控制器,控制器分析本车行驶的危险等级,当危险程度高于设定阈值发出声光碰撞报警,必要时自动刹车防止碰撞发生或减轻碰撞伤害。
3 测试验证
本文以ADAS控制器的CMB/FCW 功能为例,基于中国新车评价规程(C⁃NCAP)的CCRs工况对待测ADAS 控制器的CMB 系统进行硬件在环测试,测试工况如图7 所示。C⁃NCAP 静止碰撞工况共有3 组,两车相距30 m 时开始预警制动,车速范围是20~40 km/h,以10 km/h 递增,即每组测试工况为:CCRs⁃20、CCRs⁃30、CCRs⁃40。

图7 C⁃NCAP、CCRs 测试工况
图8 为CCRs⁃20 测试工况的测试结果。ADAS 控制器模块的FCW 前碰撞预警模块正确发出预警信号1 和制动信号2,制动过程中制动信号能够保持稳定输出,直到制动结束。车辆开始制动后,相对车速曲线变化平稳,均及时减为0,相对距离曲线均显示未与前车发生碰撞,系统输出减速度最大为-4 m/s2。

图8 CCRs⁃20,本车车速20 km/h
CCRs⁃30、CCRs⁃40 测试结果记录如表1 所示。随着本车车速的加大,持续报警时间越短,最大制动减速度越大,制动停止相对距离均表示未发生碰撞,满足期望结果。测试结果表明,基于硬件在环测试方法所设计的测试平台满足待测ADSA 控制器量产样件的功能需求,能够完成ADAS控制器的在环测试且测试效果良好。
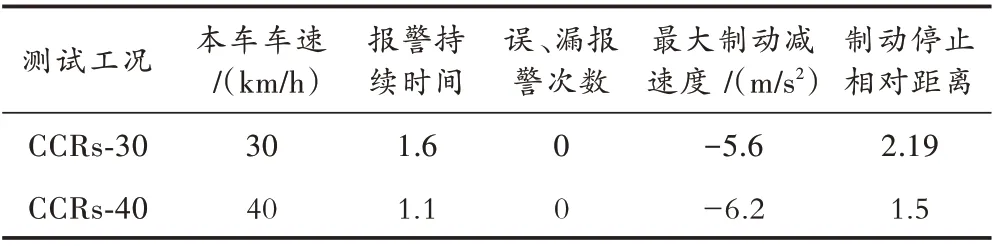
表1 CCRs⁃30 、CCRs⁃40 测试结果记录
4 结 语
本文在现有测试平台研究的基础上,设计一套面向SAE 2 级的ADAS 测试平台,采用硬件在环仿真测试方法,根据硬件在环仿真测试技术路线搭建测试平台框架;然后搭建硬件在环测试平台,对仿真测试环境软硬件以及总线调理系统进行了设计;最后基于某款量产ADAS 控制器样件为测试对象,进行硬件在环仿真测试。测试结果符合该样件的功能需求,表明了测试平台具有良好的实用性和准确性,为整个测试场景的设计实现奠定了良好的基础。下一步,需要以现有平台为基础,根据测试需求,丰富测试场景以及实现ADAS 其他子系统级的仿真测试。



