刘其峰, 刘 霞, 刘 鸿
(西安工程大学 机电工程学院, 陕西 西安 710048)
0 引 言
高压输电线路分布点多、面广,由于裸露在自然环境地形复杂,环境恶劣当中,难以避免的人为因素或自然风力因素易导致其挂上塑料、牛皮纸、风筝布、广告布等,这会致使线路短路,产生安全隐患,从而给电力系统及社会带来极大的经济损失,故需要对输电线路上的异物进行及时清除[1-4]。针对电网悬挂异物,目前的处理方法是停电作业法,利用绝缘软梯、屏蔽服、绝缘操作杆等人工处理办法及吊臂车处理办法[5]。这些方法均存在缺点:停电作业会造成经济损失;人工处理方法安全无法保证;无人机处理方法技术不成熟,操作复杂,成本较高[6-7]。随着激光技术的不断成熟,激光扫描技术具有快速、非接触、实时、抗干扰等特点[8],激光的高方向性、高单色、高相干性具有高精度、体积小等优势,被广泛应用于诸多领域[9-11]。徐鑫等人提出一种利用定向能量红外激光远程切割路基去除架空线路异物的方法,通过理论分析,进行了有限元模拟[12]。吴军等人先进行理论分析,然后进行多物理场有限元仿真建模,综合分析研究了激光作用下导线局部温度变化以及温度场分布情况[13]。振镜式激光扫描系统利用电流使转子偏转,激光束照射在振镜上,由振镜的偏转使激光束发生偏转,在扫描视场内获取激光轨迹[8]。由于振镜在偏转过程中以等角速度变化,导致在扫描电网异物过程中激光光斑分布不均匀。激光光斑的密集程度直接影响激光扫描的效率,如果激光光斑过密,则会降低激光扫描的效率;如果激光光斑过疏,则会导致激光扫描区域不完整。因此,保证区域扫描完整而且扫描效率高,进一步提高优化激光扫描过程有着重要的意义。本文针对振镜激光扫描不均匀的缺陷,利用推导的振镜激光全区域扫描条件和均匀扫描与驱动电压信号的关系式[14],实现激光光斑全区域的均匀扫描。
1 振镜扫描工作原理
振镜是一种小型的磁电式偏转器。振镜与检流计的工作原理相同,被称为检流计式振镜[15]。偏转检流计的转子由转轴和弹簧丝固定,当电流通过工作线圈时,会产生交变感应磁场。磁钢产生的感应磁场与励磁磁场相互作用,会使检流计转子发生偏转[15]。
振镜的反射镜偏转受输入电流的控制,当交变电流信号输入时,偏转过程的本质是有阻尼的受迫振动[16]。本文用一个二阶微分方程来表达运动方程:
式中:J表示振镜的转动惯量;θ表示振镜系统中反射镜的偏转角;Dm表示振镜的机械阻尼系数;w表示弹性系数;ME为力矩;t为时间。
扫描系统的偏转具有等角速度,偏转角度与控制偏转的电信号成线性,反射镜的转动方向则与弹簧力矩相反[14]。当入射电流强度较大时,相应的电压也较大,相应振镜系统中反射镜的旋转角度也较大,导致在弹簧中储存的能量较高。如果通入的电流强度为0,相应的电压也就为0,储存在弹簧中的能量也就随之释放,这会导致振镜系统中的反射镜旋转到最初的位置。由此可以得出振镜驱动电压与振镜偏转角的关系为:
式中:θmax表示振镜的偏转角度;Vmax表示振镜的驱动电压。
在扫描过程中,相等间距的振镜扫描点位置与振镜扫描偏转角度的关系如图1 所示。设d1为第一个扫描点的位置,d2为第二个扫描点的位置,di为第i个扫描点的位置。通过计算振镜扫描距离与光斑尺寸可以得出扫描光斑的数目n,公式如下:
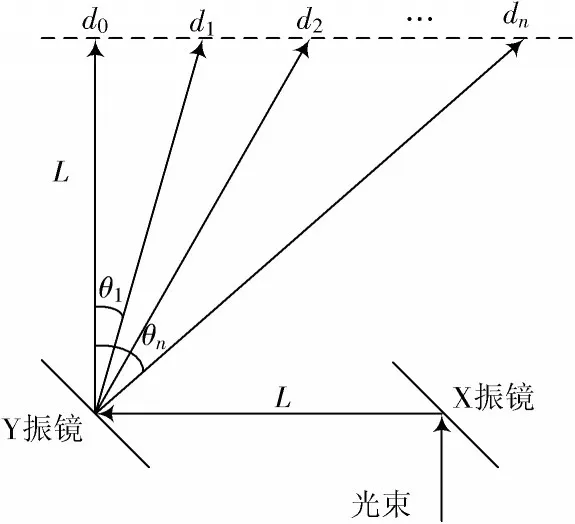
图1 扫描点与扫描偏转角的关系
式中α表示设定的扫描振镜视场角。
设振镜没有偏转时,第一个扫描光斑光束的位置为起始位,即d0= 0,当扫描振镜发生n次偏转,则第n个扫描点的位置所偏转的角度为θn。由于是等间距扫描,所以dn=nd。
因此振镜扫描偏转角与扫描光斑之间的关系为:
联立式(2)~式(4)可以得出:
式中Vn为扫描到第n个光斑时振镜的驱动电信号,本文取1/2 是因为振镜转角与反射光线转角存在2 倍关系。
由于检流计的驱动信号可以通过反馈获得,因此可以首先计算与每个扫描点对应的驱动信号,将其存储在单片机的存储器中,然后与扫描中的驱动信号进行比较,以实现控制扫描。
2 振镜扫描轨迹分析
二维扫描所生成的坐标图像和扫描角度有关,扫描轨迹也会影响扫描速度。本文对X-Y 检流计振镜扫描轨迹进行分析。光栅扫描是沿着水平方向往复扫描的扫描方式,扫描轨迹如图2 所示。光栅扫描先沿着一个方向均匀扫描,完成一行扫描后,由反方向进行下一行扫描,该扫描过程为一个扫描周期。
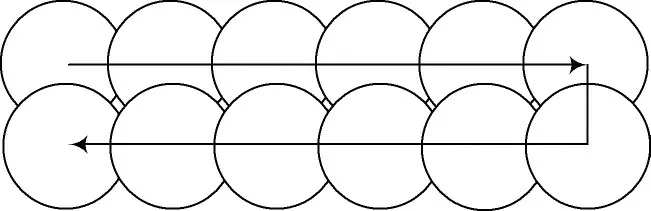
图2 光栅扫描轨迹图
X-Y 检流计振镜二维扫描图如图3 所示,其优点在于机构设计简单且容易实现。
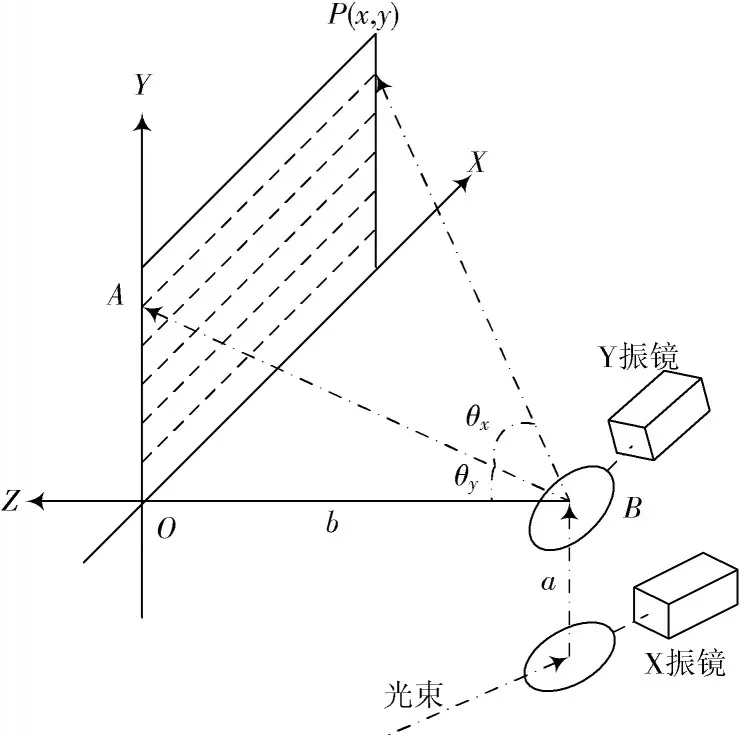
图3 X-Y 检流计振镜二维扫描图
从图3 可以看出,当激光光束入射到X 振镜后,被反射到Y 振镜,再由Y 振镜反射到成像平面。当X、Y 振镜分别偏转θx、θy时,对应的激光光束则偏转2θx、2θy。假设X 振镜到Y 振镜的垂直距离为a,Y 振镜到成像平面距离为b,则点(x,y)与X 振镜、Y 振镜的偏转角度θ的关系为:
当Y 振 镜 不 转 动,θx为0 时,X 振 镜 转 动 工 作 时,式(7)化简为:
此时振镜扫描轨迹为一条直线。
当Y 振镜不转动,θx不为0 时,X 振镜转动工作,由式(8)进行变换,得到:
此时振镜扫描轨迹为双曲线的一个分支。
当Y 振镜转动,X 振镜不转动时,公式如下:
此时振镜扫描轨迹为一条直线。
综上,由式(9)、式(10)可以看出,振镜二维扫描的轨迹生成的是枕形图像。
设a为0.01 m,b为5 m,θx与θy的 取 值 范 围 为(- 10°,10°) ,代入式(10),然后通过Matlab 仿真后得到仿真图,如图4 所示。
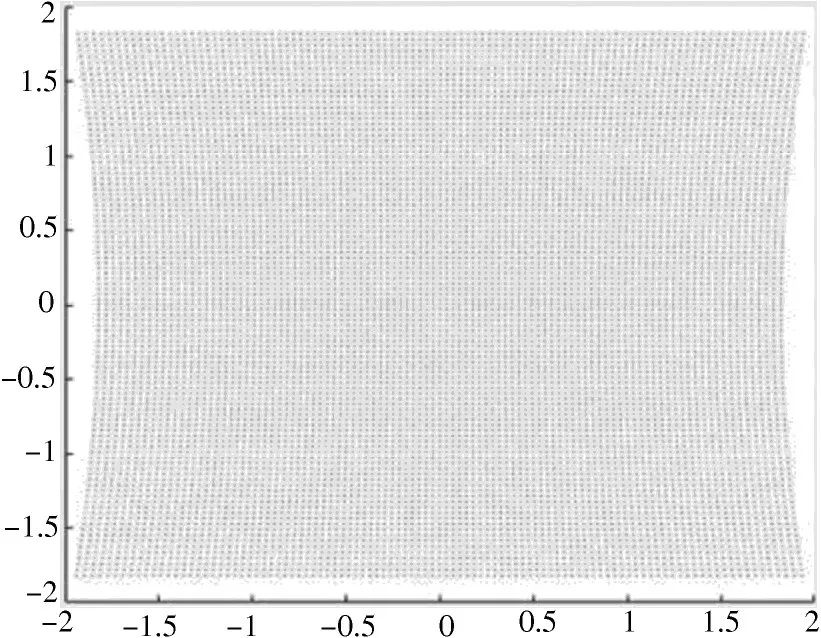
图4 仿真图(一)
通过图4 可以看出,扫描轨迹图像左右两侧有明显的枕形失真。枕形失真会使扫描图像变形,影响测量精度,导致扫描区域不均匀。因此,在X-Y 检流计振镜二维扫描轨迹的问题上,需要通过控制电压完成补偿。
由于X-Y 检流计振镜的振动是通过驱动电压变化控制的,并且电压与扫描角度存在确定的对应关系,这里可以近似理解为线性关系[17]。输入到振镜振动电机的驱动信号是一个连续的正弦波,在正弦波电压的驱动下,检流计根据磁感应电压的变化周期性振动,振动轨迹以点图的形式表示。振镜驱动电压与扫描轨迹的关系如图5 所示。
1034 Effect of blood pressure bundle management on prognosis of patients with acute ischemic stroke after intravenous thrombolysis
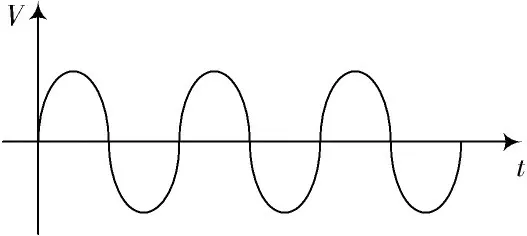
图5 振镜驱动电压与扫描轨迹的关系
由X-Y检流计振镜扫描轨迹表达式(8)可以推导出:
由式(11)可以看出导致失真的真正原因是偏转角。假设坐标(x,y)无失真,可以推导出X、Y 偏转角的变化轨迹,找出变化规律,从而校正控制驱动电压,实现枕形的校正。
校正后的坐标(x,y)与X 振镜、Y 振镜的偏转角度θ的关系为:
式中:θx、θy均是校正后的X-Y 检流计振镜扫描角度,因此可以进行校正后的点云轨迹仿真。
设a为0.01 m,b为5 m,θx与θy的取值范围分别为( -10°,10°) ,代入式(12),再通过Matlab 仿真得到的仿真图如图6 所示。
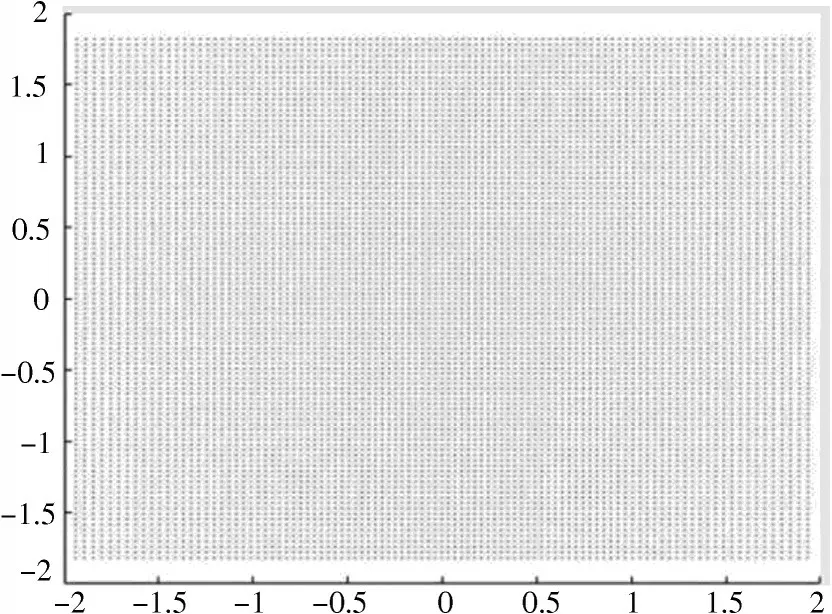
图6 仿真图(二)
由图6 可以看出,扫描区域为标准的矩形区域。通过X-Y 检流计振镜二维扫描分析得出,X-Y 检流计振镜二维扫描是对不确定区域由上到下逐行进行扫描,扫描较为完整,不存在漏扫。此振镜扫描原理相对简单,在技术上相对成熟,不但扫描频率相对较高,而且扫描精度相对较高,便于控制。
3 光斑的扫描计算与仿真
3.1 光斑的扫描计算
当振镜扫描系统以等角速度偏转时,激光光束的步长越小,靠近扫描视场中央的光斑越密集,在扫描过程就越容易造成重点现象;激光光束的步长越长,远离扫描视场的光斑越稀疏,越容易造成漏扫现象。同时光束扫描速度过高,也会造成激光光斑重叠过密,导致扫描效率降低,扫描速度过低,激光光斑间距过大,也可能造成漏扫现象。激光光斑扫描路径示意图如图7 所示。
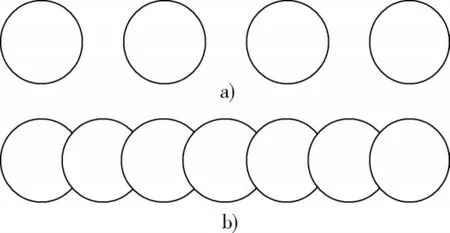
图7 激光光斑扫描路径示意图
对于相邻激光光斑而言,需要考虑光斑的重叠问题和漏扫问题,故本文重点对均匀扫描路径进行计算和仿真分析。激光光斑区域全覆盖均匀扫描示意图如图8所示。
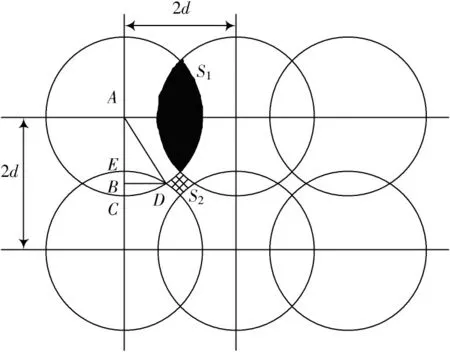
图8 激光光斑全区域均匀扫描示意图
设图8 中光斑半径为r,任意2 个光斑中心的距离为2d,其中黑色区域为重叠区,重叠区面积为S1,阴影区域为漏扫区,漏扫区面积为S2。根据图8 几何关系可知:AB的长度为d,AD的长度为r。针对扫描路径进行计算和仿真,公式如下:
由式(13)~式(15)可得:
漏扫区域面积S2为:
当扫描的光斑足够多时,平均每个光斑对应2 个重叠区域和1 个漏扫区域,所以X-Y 检流计扫描在一定区域扫描时的重叠率和漏扫率分别为:
假设激光半径r为1,d的最小值为0.7,进行Matlab仿真分析,重叠区域面积和漏扫区域面积随着扫描线距变化的仿真结果如图9a)所示,重叠率和漏扫率随着扫描线距变化的仿真结果如图9b)所示。
图9 重叠区域面积和漏扫区域面积、重叠率和漏扫率随扫描线距变化的仿真结果
从图9a)可以看出,当d= 0.71r时,光斑恰好覆盖所有区域,即r= 1 时,d= 0.71,漏扫区域面积为0,重叠区域面积为0.565 3,重叠率达27.37%,满足无漏扫条件。当扫描线距与光斑直径相等时,光斑恰好没有重叠区域,即r= 1 时,d= 1,重叠区域面积为0,漏扫区域面积为0.858 7。由图9b)可以看出,随着扫描线距的增加,漏扫率逐渐增大,重叠率逐渐减小。
3.2 光斑的扫描仿真
光栅扫描过程瞬态有限元分析的基本步骤主要包括材料属性的定义、有限元模型的建立、网格的划分、移动热源的加载等。本文分析所选材料为聚乙烯,建立激光扫描路径COMSOL 有限元分析模型,模型尺寸设置6 cm×4 cm×0.1 cm,采用超细化的网格划分以提高求解精度,分析激光扫描路径在光栅扫描方式下温度场的变化。光斑轨迹扫描网格划分示意图如图10 所示。仿真中设置激光功率为1 W、光斑半径为4 mm 的激光光束沿着自定轨迹进行扫描,扫描轨迹行线距为4 mm,扫描时间设置为10 s,共501 帧。图11 所示为光栅扫描在进行到200 帧时的点轨迹。从图11 中可以分析出,在100 帧时同一位置处,随着光斑半径的增大;重叠面积也越大。随着光斑半径的减小,漏扫面积将增大。由于行线距为4 mm,当光斑半径为2 mm 时,重叠面积为0,所以只有选择合适的光斑半径进行扫描,才可以避免重叠和漏扫等问题,进一步提高扫描的效率。同一时刻光斑扫描点轨迹如图12 所示。
图10 光斑轨迹扫描网格划分
图11 激光光斑全区域均匀扫描点轨迹
图12 同一时刻光斑扫描点轨迹
由图12 可以看出,光栅式扫描方式是激光光斑以平行线的方式逐行进行扫描,相邻两条扫描线的扫描方向相反。利用COMSOL 有限元分析软件得出扫描后的温度场。当半径为4 mm 时,温度为293.9 K;当半径为3 mm 时,温度为294.1 K;当半径为2 mm 时,温度为294.6 K;当半径为1 mm 时,温度为295.7 K。这里只展示半径为4 mm,扫描时间为10 s 时的光斑轨迹扫描温度场,光斑轨迹扫描温度场如图13 所示。通过Origin分析得出温度与扫描半径、时间的关系,如图14 所示。由图14可以清晰地看出,在扫描过程中沿自定轨迹移动温度变化不大,在只改变光斑半径的情况下,随着半径的增大,温度逐渐减小。随着扫描时间的增加,温度逐渐增加,因为扫描轨迹没有改变,时间长,扫描速度慢。但也是在常温的环境下改变,并不会对被扫描物体有变形的影响。
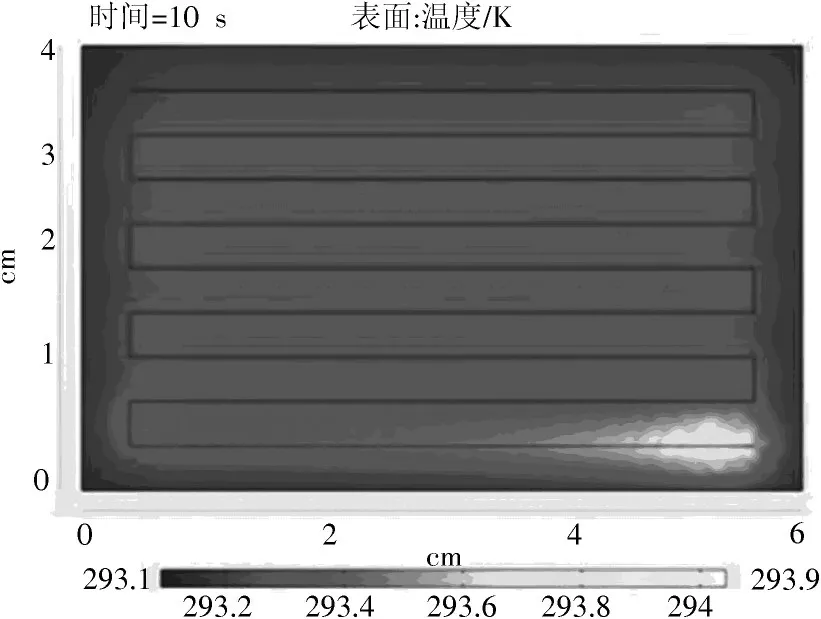
图13 光斑轨迹扫描温度场
4 结 论
文中针对振镜激光清除电网异物进行了二维扫描技术的研究。首先通过理论计算分析振镜扫描系统的扫描特性,并且利用Matlab 进行仿真分析,得到X-Y 检流计振镜在扫描过程中会发生矩形失真;然后利用三角函数进行补偿修正,仿真得到修正后的扫描轨迹,并且对光斑进行计算和仿真。最后通过分析X-Y 检流计振镜扫描方式得出:修正后的X-Y 检流计振镜扫描对确定区域扫描效果较好,由上到下逐行进行扫描,扫描较为完整,不存在漏扫,并且得出当d=0.71r时,光斑恰好全覆盖,重叠率为27.37%,漏扫率为0,即随着扫描线距的增加,漏扫率逐渐增大,重叠率逐渐减小。通过COMSOL有限元对光斑轨迹扫描进行仿真,进一步说明了该扫描方法的可行性和正确性,在振镜激光扫描系统中有着重要的参考价值。



