郜怀龙
(广东省地震工程勘测中心,广东广州 510000)
0 引言
城乡建设用地增减挂钩项目是通过建新拆旧和土地整理复垦等措施,保证在项目区内各类土地面积平衡,该项目测量区域为离散的小面积地块。传统的航空摄影测量多以固定翼飞机微平台,其飞行成本高,机动性差,只适用于大面积连续的正射影像获取,针对以上问题,本文提出了利用小型旋翼无人机搭载微单相机,分别获取离散地形的正射影像图,并以实际案例进行了精度分析对比,验证了该方法的可行性。
1 基于旋翼无人机的正射影像获取
1.1 相机检校及其原理
基于多旋翼无人机平台搭载微单相机,由于是非专业的测量相机,会存在径向畸变差和偏心畸变差[1],因此对微单相机的检校尤为必要,通过一定的数学模型测定相机的内方位元素,即确定相机的主点位置(x,y)和主距f。
确定相机内方位元素的方法有最小二乘的测角法、元素分解法[2]、后方交会法,本文利用空间后方交会测定相机的内方位元素,该方法基于共线方程原理,将像点坐标作为已知值,解算相机的内方位元素,顾及改正项的共线方程式为:
以像点坐标作为已知值,通过三个以上的像点坐标代入共线方程式,可以列出误差方程式:

其中,XAD为附加参数;XI为内方位元素;XE为影像外方位元素。
1.2 像控点布设及航空摄影
低空摄影测量中像控点的布设遵循从整体到局部,由外围到内部,密度合理,均匀布设的原则[3],首先对测区概况踏勘,为测区外围进行布点,综合测区内部的地势进行布点测量[4],并尽量均匀分布于不同地势地貌中。基于旋翼无人机搭载单反相机用于获取小范围的影像图,制图区域在20亩以内,不需要进行多张影像图的重叠度设计,可以根据测区范围设计摄影基准面高度,从测区的中心位置起飞获取影像图。
2 影像配准及空三加密
影像匹配即是将航摄的影像与实地坐标进行匹配,由于在正射影像获取时飞行平台的姿态倾斜、地形起伏等变化会引起正射影像图的形变,产生诸如行列不均匀、像元大小与地面大小对应不准,地物形状不规则变化等,因此在进行影像匹配时要对影像图进行几何校正后,才能对图像信息进行分析,制作满足测量和定位要求的数字线划图。
本文利用有理函数模型[5](RFM)对正射影像图进行几何校正,该种解算方法已在ERDAS中较为成熟的应用,其解算精度高。
其中,(r,c)为像点坐标;(X,Y,Z)为对应实地点的空间坐标,多项式中每一项的各个坐标分量X,Y,Z的幂不超过3,每一项各个地面坐标分量的幂的总和不超过3,每个多项式形式为:
其中,X,Y,Z均为已知值作为式中的自变量,代入多项式中解算系数aijk。
使用空三加密方法,利用少量的野外控制点,进行控制点加密,可以有效提高作业效率。独立模型法利用空间相似变换的理论模型,在整体的测量区域内,用平差的方法确定影像图在区域中的最或然位置,计算出模型转换的七参数:3个平移参数、3个旋转参数、1个比例参数,然后利用七参数解算加密点大地坐标(XD,YD,ZD),在旋翼无人机航摄中可以通过一张影像覆盖测量区域,在解析空中三角测量时使用独立模型法可以快速高效的进行控制点加密,见下式。
其中,(X,Y,Z)为像控点的模型坐标;(XT,YT,ZT)为对应像控点的地面坐标;(X0,Y0,Z0)为模型平移的三个分量,为模型缩放比例尺因子。
3 影像判读及外业补测
利用匹配好的正射影像图在南方CASS成图软件中对影像图进行矢量化,将匹配好的影像图导入到程序中,根据判读出的地形地貌,进行点状要素、线状要素的绘制,并将绘制的点、线矢量图进行属性分类,并依据属性分设不同的属性图层。
在野外调绘前先将影像图与内业矢量化的DLG进行叠加,喷绘出图制作出外业调绘片,依据调绘片进行野外调绘作业,在野外调绘前先对测区进行了解,制定作业顺序,按照从左到右,从上到下顺序进行,重点对内业中标记的遮挡区域和模糊区域进行调绘补测,在野外调绘完成后,逐片、逐段、逐项仔细认真的清绘,确保外业调绘的工作质量。
4 实例应用
4.1 项目概况
航测的区域是2016年河源市连平县建设用地增减挂钩项目,有13个地块需要测量,东西跨度12 km,南北跨度8 km,总共面积692亩。项目要求达到1∶2 000地形图测量精度。
本次实验使用的是大疆无人机PHANTOM4PRO型号,属于专业级四轴飞行器,悬停精度,垂直:±0.1 m,水平:±0.3 m;搭载ILCE-7M2索尼相机。对测量区域逐个进行航拍,利用CASS软件对匹配好的影像图进行矢量化。
4.2 精度对比
从图中选择可以明显识别的地物点12个进行检测,使用天宝4600双频RTK搭配强制对中杆,利用四参数+高程拟合模型解算出测区的转换参数,并对选出的8个地物点进行测量,与线划图中的地物点坐标进行精度对比,见表1。
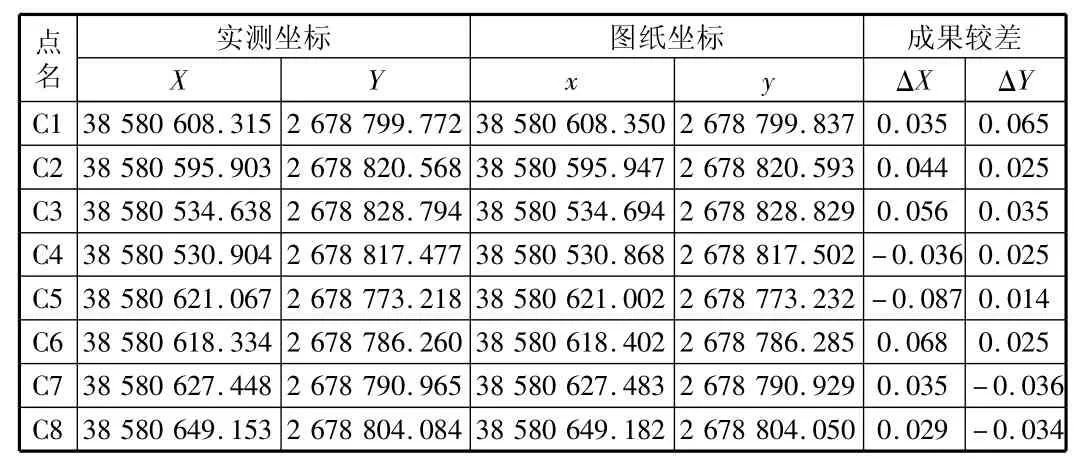
表1 实测坐标与图纸坐标较差
表1的数据对比中可以看出,平面检测结果中较差最大ΔX=87 mm,ΔY=65 mm,利用误差方程式解算出中误差Mx=35 mm,My=20 mm,误差在测图的允许限差范围内,精度能够满足1∶2 000地形图测量要求。
5 结语
本文提出了基于多旋翼无人机平台搭载高分辨率单反相机,获取测量区域正射影像图的方法,文中介绍了该方法的工作原理,并通过实际案例证明:该方法是一种高效率、低成本的测绘方法,其测量精度能够满足1∶2 000地形图标准,有效解决固定翼无人机在小范围分散地形测量低效率、不灵活、高成本的问题。



