孙博 白树海 华远峰 郑磊
(1.天津市市政工程设计研究院,天津 300051; 2.天津市宽达市政工程测绘有限公司,天津 300211)
近些年来,伴随着我国社会经济的不断壮大,社会发展的速度越来越快,一些原有的包括道路、桥梁、城市绿化在内的城市基础设施已经不能充分满足人们的应用需求,因此许多城市开始对交通、建筑立面更新以及城市家具等进行相关的综合整治工作,一方面可以促进城市交通网发展,改善街区精致度;另一方面可以提升街区业态活性,丰富街区景观,以更加充分彰显城市发展的新面貌。但是在进行城市基础设施改造时,待改造设施周围已有建筑物的保护、历史建筑与历史街区等不需要进行改造的设施需要进行保护,因此将街道两旁的建筑物以立面的形式整体、统一的表现出来成为施工前的一项重要的准备工作。因此在进行施工工作前,需要用测绘手段获取建筑物的相关信息。目前应用较为广泛的立面测绘的技术方法主要有人工量测法、全站仪法、三维激光扫描法、近景摄影测量法等。但传统测绘方法会面临工作量较大,精度较低等问题。如何能够采用一种方法尽可能减少工作量的同时又能保证一定的精度是本文所要进行研究的内容,因此,本文采用了三维激光扫描仪对建筑物立面测绘进行研究,以更好地适应建筑立面测绘的要求[1-4]。
1 三维激光建筑立面测绘技术
1.1 三维激光扫描仪工作原理
目前,较为广泛应用于工程项目及科学研究的三维激光扫描仪的种类主要分为脉冲式三维激光扫描仪、相位差式三维激光扫描仪以及三角测距式三维激光扫描仪,其中,脉冲式的扫描仪应用的更为广泛。脉冲式三维激光扫描仪的工作原理是基于激光测距的原理进行扫描的相关工作,通俗讲就是利用扫描仪发射脉冲信号和接收激光信号返回的时间进行测距,利用激光脉冲在瞬时集中较大能量的特点扫描获取待扫描建筑物表面大量的密集的点的相关信息,之后根据所获得的扫描信息经过内业处理后可以获得建筑物的特征点、线、面,最终对被扫描物的整体信息进行整理后进行建筑物模型的建立。除此之外,在外业扫描过程中还会根据实际需要通过内置或外置数码相机获取实体影像信息,从而记录建筑物表面颜色信息,以备在后期进行数据处理时针对需要对扫描数据的点云进行像素加载,从而有助于绘图时对特征点进行选取,可以进一步提高可视化效果。
1.2 三维激光扫描仪工作技术路线图
在前面我们介绍了三维激光扫描仪的一些工作原理,那么针对于三维激光扫描仪的工作原理并结合项目要达到的目标成果,我们要制定扫描工作的整体流程。据此,我们制定了扫描工作的技术路线,总体技术路线如图1所示。
2 立面测绘方法
根据所要测绘立面的建筑物实际情况以及现有的仪器设备(RIEGL VZ-1 000三维激光扫描仪),本研究进行了相关的测量工作。具体方法介绍如下。
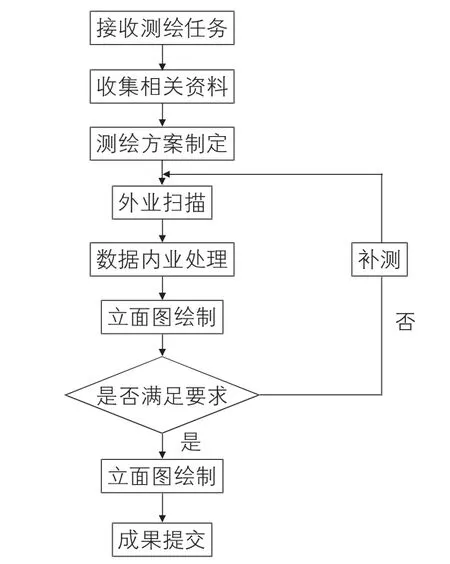
图1 立面测绘技术流程图
1)现场情况调查及测绘方案的制定。根据现场需要扫描的建筑物的整体情况,包括建筑物的大小、形状、扫描区域的分布等确定仪器的架设位置,由于后期处理点云数据得到的建筑物立面扫描图是根据同名像素点匹配进行拼接得到的,且对于立面测绘结果不需要确定其位置,因此并不需要进行架设点位置的测量,只需保证仪器能够将建筑物立面进行完整的扫描。因此根据该项目所要扫描的建筑物的实际情况,确定仪器的架设点位。
2)对扫描数据进行配准。数据预处理和配准采用Riegl公司的软件Riscan Pro。外业采集数据的工作完成后,需要进行内业处理从而确定外业工作成果质量。在数据完成与处理的工作后,则需要按照下列方法进行站站间的配准:理论上讲,站间数据配准至少要选择4个同名像素点对两站的扫描的点云结果进行拼接,粗配结束,采用ICP自动精配,提高配准精度。
3)对拼接后的点云图像进行去噪处理。由于我们在进行建筑物立面测绘的外业扫描工作时,待扫描建筑物很多情况下都不是独立存在的,在使用三维激光扫描仪对建筑物立面扫描时,会将大量不需要的建筑物、绿化等基础设施及车辆、行人等事物的点云一起扫描进来,这些非目标扫描物的点云集合统称为噪点。由于本项目采用仪器直接采集,因此必须设定为360°全景扫描,所以扫描结果包含了建筑物周边的全部物体,这些多余的扫描信息不但使文件占用了额外的存储空间,在对文件进行处理时会降低效率,同时还对目标扫描物的结果信息的提取造成了严重影响,所以需要对点云进行去噪,即对点云数据进行处理时要删除掉建筑物周边的其他地物。
4)真彩色模式显示。在对点云数据进行拼接和去噪处理后,对点云数据进行真彩色像素信息加载,对点云数据进行真彩色像素信息加载主要是为了进行建筑物立面绘图时,在提取特征点时可以更加清晰的找到对应的特征点,提高内业的工作效率。
5)建筑物立面图的绘制。绘图人员在电脑内选择立体观测模式,对于较为容易分辨,特征比较明显的点进行选取,而后进行三维量测,然后在获得相关特征点及特征线的相关特性后,在AutoCAD中完成内业成图工作,得到最终的建筑物立面图。
6)外业调绘、修补测。对于缺失较少或扫描质量不高的小部分平面,可以采用盒尺等传统的测量工具进行补测,对于缺失较多部分的,应当采用激光扫描仪对缺失部分进行扫描。在完成外业补测工作后,再对缺失部分进行内业成图。
3 工程应用
2018年6月,我单位承担了某市样板街工程项目。该项目需要在对道路两旁的建筑进行系统梳理的基础上,按相应风格对部分建筑进行立面改造。结合本项目天山海世界建筑(图2是天山海世界部分外观图)的三维模型建立过程、立面图绘制过程以及最终得到的成果对三维激光扫描技术在建筑立面测绘中的应用进行研究分析。

图2 天山海世界现场示意图
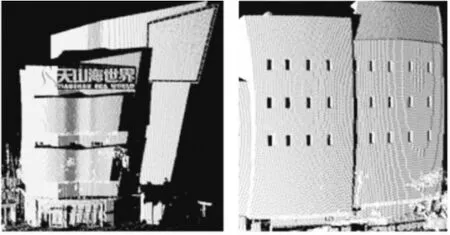
图3 天山海世界局部点云配准效果图
1)根据现场需要扫描的建筑物的整体情况,包括建筑物的大小、形状、扫描区域的分布等确定仪器的架设位置。由于天山海世界建筑不规则且建筑面积较大,为了得到完整的扫描图像,围绕天山海世界共架设了11站,对天山海世界进行精细扫描。2)数据采集完后,需把数据导入到电脑中对数据进行拼接和去噪处理。进行数据的配准与去噪之后,部分拼接配准后的点云数据如图3所示。从图上可以看出,本次扫描点云拼接、配准效果较好,点云密度足够,能够很好的呈现出天山海世界的建筑细节。3)点云数据滤波、去噪、拼接、配准后,对点云数据进行真彩色赋色,以便更好的分辨建筑立面的细节,建筑真彩色显示如图4所示。然后利用Riscan软件以立体观测模式进行三维量测,对一些特征性较为明显、位置较为容易分辨的点进行选取,之后量取这些具有明显特征的点的三维距离,然后在AutoCAD中进行绘图,得到最终的建筑物立面图,局部建筑平面图、立面效果如图5,图6所示。

图4 天山海世界点云真彩色效果图
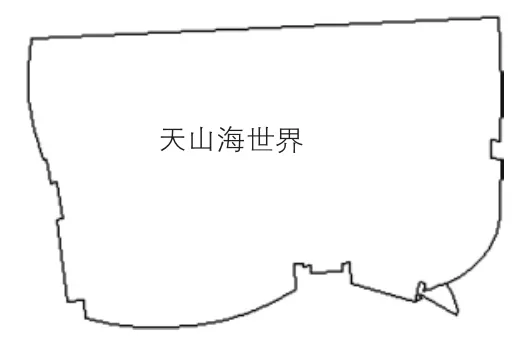
图5 天山海世界平面结构图
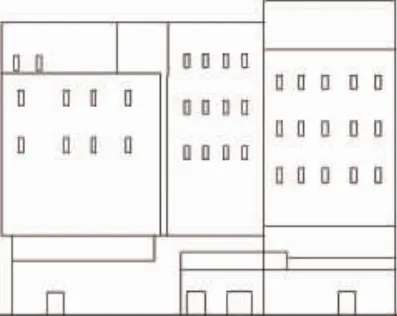
图6 天山海世界局部建筑立面图
4 结语
针对于建筑物立面测绘的相关工作,免棱镜全站仪法也可以在一定程度上提高外业效率,但是虽然相比于传统测绘方法,免棱镜全站仪法可以提高效率,但是免棱镜全站仪方法的外业工作量依然较大,且针对于特征不明显的点位不能保证进行有效的识别。而三维激光扫描仪法与免棱镜全站仪法相比可以进一步缩短外业工作时间,且在处理内业时由于可以看到建筑物的整体形状及变化趋势,而并非是一个一个的点,这样可以针对外业测量成果更加准确、有参考的进行绘图,可以进一步提高可视化效果和工作效率。



