史建青,焦明连,董春来
(1.武汉大学 测绘学院,湖北 武汉 430079;2.淮海工学院 测绘学院,江苏 连云港 222005)
信标GPS定位信号与测深仪水声信号的融合技术研究
史建青1,2,焦明连2,董春来2
(1.武汉大学 测绘学院,湖北 武汉 430079;2.淮海工学院 测绘学院,江苏 连云港 222005)
以水下地形地貌测量为例,通过测量仪器硬件有效安装和倾斜改正,对信标 GPS定位信号与换能器测深水声信号的空间位置在垂直轴上进行统一;以计算机API时钟作为时间基准,使定位信息和测深信息在时间轴上对齐;经过位置与时间信息融合后,形成空间匹配的三维数据。
信标 GPS;信息融合;空间;时间
利用测杆、水铊测深和岸上经纬仪定位比较简单的水下地形测量方法,形成的信息少、内容比较单一、数据融合工作比较容易处理。但是,目前在进行水下地形地貌测量时,一般由信标 GPS接收机提供测量点的平面坐标,而垂直坐标是由单波束或多波束测深仪测量水深再加上水面高程获得,测深和定位是由不同传感器获得的;定位和测深系统日趋复杂,输出信息量大幅度增加,仅靠人类大脑进行融合巳经不可能,于是用信号处理系统自动进行数据融合非常必要。
1 信息融合的定义
信息融合一词出现在20世纪70年代初期,并于80年代发展成为一门专门技术。它是人类模仿自身信息处理能力的结果。信息融合的基本原理就像人脑综合处理信息一样,充分利用多个传感器资源,通过对多传感器观测信息的合理支配和使用,把其在空间或时间上可冗余或互补的信息,依据某种准则来进行组合,以获得被测对象的一致性解释或描述。
信息融合的目的是通过信息组合,推导出更多的信息,得到最佳协同作用的结果,即利用多个传感器共同或联合操作的优势,提高传感器系统的有效性,消除单个或少量传感器的局限性。数据融合比较确切的定义可概括为:充分利用不同时间或空间的多传感器信息资源,采用计算机技术对按时序获得的多传感器观测信息在一定准则下加以自动分析、综合、配合使用,获得对被测对象的一致性解释和描述,以完成所需的决策和估计任务,使系统获得比它的各组成部分更优越的性能。
数据融合可以分为3个层次,即:数据融合、特征融合、决策融合。目前应用最多的仍是决策层次的数据融合。本文主要讨论决策层次的数据融合。
2 数据处理流程
进行信号融合处理的目的就是为了建立准确的水下三维数字高程模型,为航运和水工建筑物的建设等工作服务,此过程如图1所示。
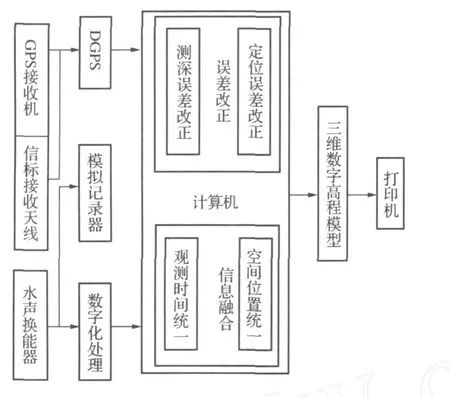
图1 三维数字地形模型总体框图
3 信标 GPS定位信号与测深换能器水声信号在位置上的信息融合
定位中心偏心是指由于 GPS接收天线中心与测深仪换能器中心不重合而引起的测量误差。假设测深仪换能器中心距 GPS天线中心在 x轴方向为1 m,则相邻测线间距会引起±2 m的变化,如图2所示。图2(a)为正常测深线,图2(b)为定位中心不一致后引起的测深线变稀或变密的后果。由于海上测量作业远比陆地上困难,为了减少内业数据处理的复杂性,用于港区和近岸测量的小型测船,应尽量把用于定位的信标 GPS天线和测深的换能器安装在同一铅垂线上,消除两者所谓的偏心误差,如果两者中心不一致,规范要求其偏差不宜大于图上0.3 mm[5],超限时应利用式(1)进行改正。
在测船坐标系中,定位中心偏心误差为

式中:S为测深换能器偏心距,φ为偏心角。
测船在作业过程中由于受到风浪和其它因素影响而产生纵摇和横摇,使定位的信标 GPS天线和测深仪换能器不垂直,也就是说使两者不能处于同一铅垂线上,使定位点和测深点在海底面上的投影不重合,其差值与纵摇和横摇的大小成正比,这种误差是海洋测量的主要误差之一。虽然许多学者在理论上对此进行了深入研究,还做了不少实验,但是,由于此改正值在大小和方向上是一个随机的变量,要获得此项改正数据,需要设备量大、且数据后处理复杂,在实际生产中还没有得到广泛的运用。在海况好的情况下,由于测船自身的重量,可以将波浪造成测船的大部分纵摇和横摇误差滤波掉,不加此项改正,也能够满足海洋测量中现行相应测图比例尺的精度要求,信标 GPS定位值即为相应时间的水下地形点的平面位置。所以说,在沿海风浪较大的海况下,当波高超过0.6 m时[5],应停止野外作业。
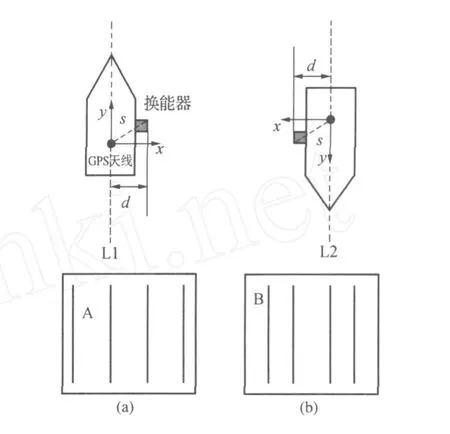
图2 定位中心偏心原理及定位中心偏心前、后测深线(航迹)变化
4 信标 GPS定位信号与测深换能器水声信号在时间上的信息融合
在进行水下测量时,由于定位和测深是由两套相互独立的设备施测完成的,在施测数据、处理数据和传输数据的环节上,两仪器的时间延迟不可能相同,因此,必须施测各个环节的时间延迟,使定位数据和测深数据在时间轴上对齐。
大多数信标GPS接收机提供一个符合RS-232电气标准的数据接口,测深仪同样也有一个符合RS-232C电气标准的数据接口,这两个 RS-232口分别与计算机的两个串行口相对接。GPS设备通过串口RS-232按照一定的波特率向PC机传输定位信息,并记录其传输到计算机的时间;水声换能器(测深仪)也是通过串口RS-232按照一定的波特率向PC机传输测深信息,并记录其传输到计算机的时间。计算机获得了GPS接收机输出的有关定位信息和测深换能器水声信号的信息(见图3)。
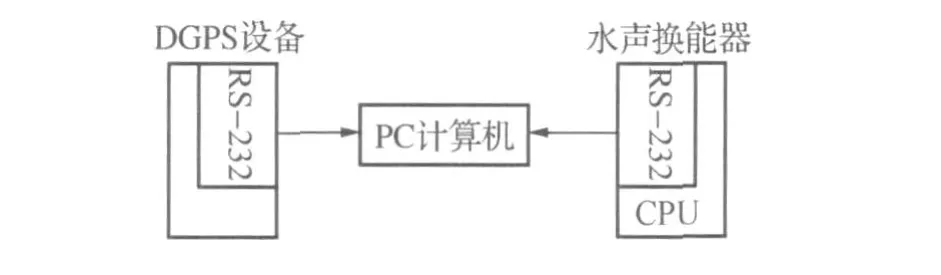
图3 硬件系统连接示意图
以计算机API时钟为基准,以普通便携式计算机、单波束测深仪和 RBN-DGPS型信标机为例,就定位时刻和测深时刻的时间同步加以分析。
利用模拟测深仪+数字化仪的组合型单波束测深仪,测量时从其串口不断输出测深数据,对于这种测深仪,首先测定其输出数据与数据测量时间的延迟d tc,便携式计算机的两个串口分别连接到信标GPS接收机和测深仪的数据输出口,同时接收信标GPS和测深仪输出的数据。由计算机根据导航数据首字节到达时间 Tgj(计算机时间)和测深数据首字节到达时间 Tcj(计算机时间),计算其时间差d tgc=Tcj-Tgj,再根据所用的信标 GPS接收机输出的导航数据相对于该数据的测量时间的延迟d tg,计算测深数据相对于导航数据计算机时间的总延迟d ta=d tgc-d tc+d tg,进行数据的内插处理,将测深和定位数据在计算机时间轴上对齐。
测深仪在 ts时发射声脉冲,在 tr时收到回声,经过处理后,在 tt时刻从串口输出测深数据,测深仪输出数据的延迟d tcy=(tt-tr)+(tr-ts)/2。往返时间为(tr-ts),其对应的测量时刻为 th=(tr+ts)/2,水深 h=声速 v×往返时间的一半。往返时间(tr-ts)是水深的函数,(tr-ts)/2=h/v。对于某种型号的测深仪,传输延迟(tt-tr)可以认为是常数d tcl,该常数一旦测定即可长期使用。因此,使用的测深仪输出数据的延迟为d tc=d tcl+h/v,每一个数据的延迟都要根据测量的水深和设定的声速进行计算。
测深仪输出数据的延迟,可以用具有时间间隔测量功能的测量仪器,测量测深仪发射的声脉冲与其后输出的测深数据的间隔作为d tc,并根据所测的水深和设定的声速计算d tcl。
计算机以中断方式进行字节接收,记录每一组测深数据和定位数据首字节的接收时间(计算机时间),接收时间由串口中断处理程序给出。一组测深数据往往有固定的结构,即起始字符+数据+结束符,如果起始字符是独特而又易于识别的,可直接对起始字符进行跟踪;如果起始字符不是独特而又易于识别的,则可以结束符CR/LF作为识别标识,在收到结束符后,设置标识,表明下一个字节为首字节。计算机根据相邻的测深数据和定位数据首字节的时间,计算两者的时间差d tgc,并根据所用的 GPS接收机输出的导航数据的延迟d tg和测深仪输出数据的延迟d tc,得到测深数据所对应的计算机时间,完成时间同步。
5 结 论
1)以计算机API时钟作为定位和测深在时间轴上对齐的基准,在理论上容易理解,在实际工作中容易实现,特别是对经常在一些深度变化不大的区域进行水下地形地貌测量的情况,测深和定位的时间延迟一经测定,可以作为常数使用。
2)经过空间位置融合和时间基准统一,形成空间匹配的三维数据,利用一定的数学算法,最终形成水下数字高程模型(DEM),为工程建设和管理打下坚实的基础。
[1]赵珞成.利用 GPS导航信号进行水下地形测量的时间同步[J].海洋测绘,2002(9):20-23.
[2]赵珞成.GPS输出的NM EA 09183信号的时间特性分析[J].海洋测绘,2002(5):19-21.
[3]方兆宝,赵宝勋.海洋测深中的波浪效应改正技术[J].海洋测绘,2001(3):19-26.
[4]郭文伟,张铁军,李金亮,等.JTJ203-2001水运工程测量规范[S].北京:人民交通出版社,2002:42-48.
[5]张红梅,赵建虎.精密多波束测量中 GPS高程误差的综合修正法[J].测绘学报,2009(2):22-27.
Study of orientation signal of beacon GPSand the depth signal of underwater acoustic transducer information fusion technology
SH IJian-qing1,2,JIAO M ing-lian2,DONG Chun-lai2
(1.School of Geodesy and Geomatics,Wuhan University,Wuhan 430079,China;2.Schoolof Geodesy&Geomatics Engineering,Huaihai Institute of Technology,Lianyungang 222005,China)
Taking underw ater topographical surveying as an examp le,the position and dep th are consolidated in the space by fixing instruments and adjusting slant;the APIclock of computer acts as the basis to right of the information orientation and the dep th in the time axis.Then two typesof information are formed into right three-dimension datas of space.
beacon GPS;information fusion technology;space;time
P228
A
1006-7949(2011)02-0018-03
2010-01-17
史建青(1966-),男,副教授,博士研究生.
[责任编辑张德福]



