陈喜凤,黄 腾,刘 岭,沈月千
(河海大学 地球科学与工程学院,江苏 南京 210098)
1 概 述
距离开挖基坑边线50m范围内的地铁隧道称为地铁保护区。地铁保护区监测一般包括隧道的垂直位移监测、水平位移监测、断面收敛监测,具有监测时间长、频率高、内容多等特点。常规监测方法不具备实时性,观测时段和频率受限,测量结束后数据处理、分析、出监测报告周期长,不能及时反馈变形情况,迅速报警,已无法满足日益增长的快速施工和不断提高运营维护效率的要求。近年来,徕卡新一代GeoMoS自动监测系统的出现为此带来了新的曙光。应用GeoMoS自动监测软件(根据需要可对其进行二次开发)配合徕卡TM30自动全站仪,可实现对地铁保护区的全天候自动化监测,实时进行数据自动化处理和变形分析,自动生成监测报告,自动报警和进行应急处理,既保证了隧道结构和地铁运营的安全,又为管理维护部门提供了一种科学、高效、便捷的管理手段。
2 GeoMoS自动化监测系统组成
2.1 GeoMoS软件及其特点
GeoMoS(Geography Monitoring System)是由徕卡测量系统研发的自动化监测软件平台,可译为“地表监测系统”,是一个集GPS、全站仪(TPS)、倾斜传感器、各种气象和地质传感器等多种传感器于一体,可以实现计算机远程控制和配置,具备自动报警和消息发送功能,能按照既定程序进行自动应急处理,并实现实时可视化分析结果的24h不间断运行的全自动监测系统。其软件主要由2部分组成:监测器(Monitor)和分析器(Analyzer),都连接于SQL Server数据库。
1)监测器功能:集成支持的多种传感器进行数据采集;根据需要设置测量时间和测量模式;进行学习测量;对测量、计算、限差检测等参数进行自定义;用自由设站、交会或GPS更新手动设置测站坐标和定向;将测量点按不同的用途分成不同类型的点组,每类点组被赋予不同的优先权,在各测量周期中,按预定的时间先后及点组的优先权进行测量,使得整个监测过程有条不紊;实时显示当前测量信息;实时探测各传感器的工作状态;原始数据的粗差检查;根据需要手动暂停或终止测量;数据库自动导出等。
2)分析器功能:随时查看监测器中已有的或新添加的点、断面或点组的情况;数字和图形方式分析来自监测器的数据,显示位移、速度和矢量信息;计算日平均变化量;进行超限探测;自动消息报警;其数据和图表可被复制到其他应用软件(如Microsoft WORD、EXCEL)中进行再编辑等。
2.2 Leica TM30自动全站仪
TM30是徕卡继TCA2003之后推出的电子全站仪,是目前Leica唯一指定的与GeoMoS无缝连接的全站仪,具有无棱镜测距、自动目标识别以及马达驱动功能,水平角测量精度为0.5″,垂直角测量精度为1.0″,精密测距精度为0.6mm+1ppm,标准测距精度为1.0mm+1ppm,完全能保证隧道变形监测的精度要求。其望远镜的小视场功能可以较好地解决地铁隧道狭长空间因棱镜过多而照错目标的问题。
2.3 Leica标准精密测距棱镜和反射贴片
棱镜作为观测标志利用膨胀螺丝固定在隧道内侧,其数目可按实际需要设定,该标志能被TM30全站仪自动跟踪锁定以实施精密测角和测距。对一些精度要求相对较低的监测点或因隧道内条件限制不宜安装棱镜的,可根据情况选用60mm×60mm的反射贴片作为观测标志。
2.4 其它设备
其它设备包括温度计、气压计、湿度计、连接电缆、外接电源等,温度计、气压计、湿度计用于测定空气温度、气压和湿度,以修正观测结果,提高观测精度。
(2)根据模拟仿真结果,发现以往习惯操作下的补浇冒口仅能起到补充首次浇注时钢液量的不足,如果想通过补浇实现增加冒口模数和减弱冒口下偏析的目的,则需要使用多次补浇方案并适当延长时间间隔,以及采取措施避免冒口顶层钢液过早凝结成壳。
2.5 数据通信
观测数据可通过有线或无线方式实时传回服务器,目前可通过有线电信和无线CDMA、GPRS、3G等模式进行数据传载。从应用效果来看,3G模式的传载速度明显优于其它传载方式[2]。
2.6 后处理软件
GeoMoS软件已基本能够完成经典的平差计算、数据分析和成果输出,但在特定的地铁保护区监测项目中,需要按照委托方要求进行测量并提交成果,这就需要利用与GeoMos的软件接口,对GeoMoS软件做二次开发,对测量数据进行后处理,按要求的格式自动生成监测报告。
3 监测实例
3.1 工程概况
某项目基坑位于某市地铁一号线玄武门站至新模范马路站(含)区间西侧,其边线对应地铁里程大概为K12+368~K12+448,长度约为80m。地铁车站主体距基坑外边线约8.9~13.6m;区间距基坑外边线约11.6~12.4m。地铁隧道坐落在高含水量、高压缩性、高灵敏性、低强度、易变形的粉质粘土层,地质状况较差。监测范围为项目建设的基坑边线对应的地铁线路里程区域及沿线路方向前后外放60m,即K12+308~K12+508,长度约200m。
3.2 监测网的布设
监测网点的设置要综合考虑监测要求和自动全站仪的视场要求,布网前可根据所用全站仪的小视场功能进行点位估算。在上、下行线隧道相同里程处布设对称的监测点位,点名分别以S(上行)、X(下行)开头进行标注。因下行线靠近基坑,本文以下行线监测情况为例进行分析,点位布设情况如图1、图2所示。
基准点要求稳定可靠,远离变形区80~120m。如图1所示,在下行线变形区外两端约100m处各布设2点(JX1、JX2;JX3、JX4)作为基准点。基坑边线对应车站及区间隧道范围内线约每10m布设一个点(X4~X12),边线对应范围外每20m布设一个点(X1~X3;X13~X15)。车站主体与区间盾构连接处两侧布设一对差异沉降监测点(X7与X7-1)。区间隧道布设7对收敛监测点(SLX7~SLX13),与相应的三维变形监测点(X7-1~X13)所在断面重合。各监测断面上监测点布设示意图如图2所示(图中以X7断面为例,其余断面布设与此相同)。采用自定义的空间直角坐标系,沿隧道轴线方向为X轴,垂直轴线方向为Y轴,铅垂方向为Z轴。假定JX3坐标为(1 000.000,1 000.000,10.000)(单位:m),JX3到JX4的方位角为0°(称为隧道坐标系)。在监测区域中间位置的隧道侧墙上,设置一个固定强制对中墩台作为监测站(见图1)。将TM30置于墩台上,并用特制的玻璃罩保护,玻璃罩要定期清洁以免影响测量精度。各基准点和监测点上均安装有固定的棱镜或反射贴片,所有监测设备均不影响列车正常运行,完全符合“区间直线地段矩形隧道及车辆界限”的有关安全规定。
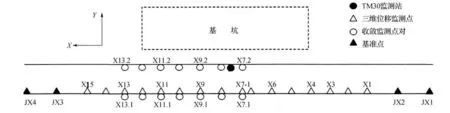
图1 下行线监测点位布设图
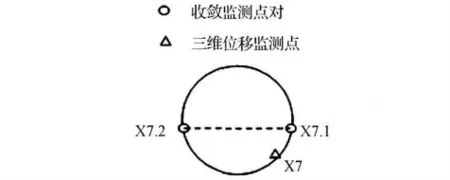
图2 X7断面上监测点布设示意图
3.3 测量方法与数据处理
观测时采用TM30全站仪以ATR模式观测,每个观测周期开始前,测量4个基准点(JX1~JX4)4个测回推算出测站点在隧道坐标系下的坐标,然后根据之前的学习测量结果,对所有监测点进行自动观测,得到监测点的坐标。根据基坑施工状况在GeoMoS中设置观测时间、观测频率、观测模式。夜间地铁停运时为最佳观测时间,一般观测1~2次,每次观测2测回,白天地铁运行时,一般观测2~4次,每次观测两测回,每周期测量约需15min。随着基坑开挖深度的不断增加,可以加大重点部位的观测频率。在测量过程中,自动判断各测回内和测回间的测量成果是否超限,如果出现目标遮挡(如列车驶过),系统自动进行合理等待处理。
GeoMoS监测系统对基准点、工作基点及监测点在同一周期内进行测量,数据处理系统会先利用基准点及工作基点测量数据对其稳定性做出判断,实时更新工作基点坐标,再进行监测点三维坐标的解算。然而,由于气象因素所引起的测量误差和全站仪水平度盘0方向的漂移对观测值存在系统性影响,两期得到的坐标差并不是点位真正的移动。为此,在基准点与测站点均稳定的条件下,在GeoMoS中进行相关设置,系统即可根据系统差分原理[3],利用基准点在两测量周期的差异,自动修正这两项系统误差对监测点坐标位移的影响。系统会将观测数据、周期平差数据、位移量等预处理结果存储在SQL Server数据库中,再利用专门编制的后处理软件,自动生成用户要求的相关报表。
3.4 监测结果分析
3.4.1 点位三维坐标精度分析
GeoMoS分析器根据极坐标测量原理及Helmert点位误差估计理论,对各监测点的坐标精度及点位误差进行计算,结果见图3。

图3 下行线点位三维坐标精度
X方向最大测量中误差为0.50mm,Y方向最大测量中误差为0.27mm,Z方向最大测量中误差为0.35mm,最大点位中误差为0.64mm,鉴于测站设在X8断面附近,所以图3中所得点位精度与现场实际情况是相符的。隧道的垂直位移和水平位移监测主要分别监测变形点在Z,Y方向上的位移量,该自动化监测系统可以保证这2个方向上的精度在±0.40mm以内。考虑到基准点观测的三维坐标精度分别为σXJ=0.55mm,σYJ=0.32mm,σZJ=0.63mm,可以估算监测点垂直位移的最大误差为0.72mm,水平位移的最大误差为0.41mm,能够满足地铁隧道保护区变形监测的要求。另外,监测点的位移量观测精度约为=0.91mm,如果取监测点位移量中误差的2倍作为监测点位移量观测误差的极限误差,可以认为当位移量超过1.82mm时,监测点发生了明显位移。
3.4.2 隧道断面收敛精度分析
与传统的收敛计测量断面收敛不同,本项目中用GeoMoS控制TM30采用全站仪坐标测量法,分别测量某一断面两侧的2个对应监测点(如图2中的X7.1,X7.2),计算出两监测点间基线长度,通过比较不同监测周期基线长度的变化,得出每个断面的收敛变化情况。
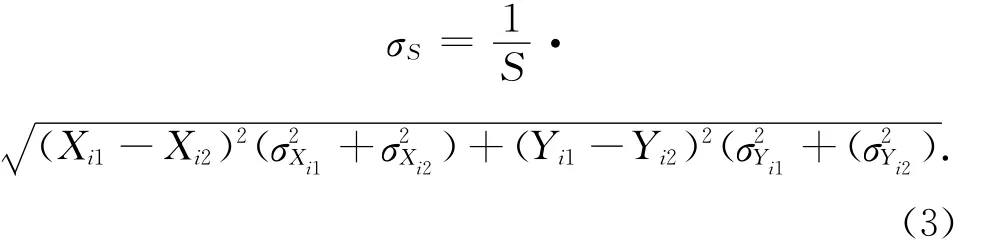
设在监测站上测得的各断面上一对收敛点坐标分别为(Xi1,Yi1),(Xi2,Yi2),i=7,8,…,13。则两点间基线长度(收敛值)为

将式(1)两边平方并求全微分得

设σXi1,σYi1,σXi2,σYi2分别为两收敛点X,Y方向上的中误差,则由误差传播可得收敛值的中误差
收敛监测标志可以视隧道情况和精度要求选择Leica标准棱镜或60mm×60mm的反射贴片(测距精度分别为0.6mm+1ppm和1.0mm+1ppm),根据GeoMoS监测器中各点测量标准差统计及式(1)、式(3),可估算下行线X7~X13各断面的收敛测量精度见表1。
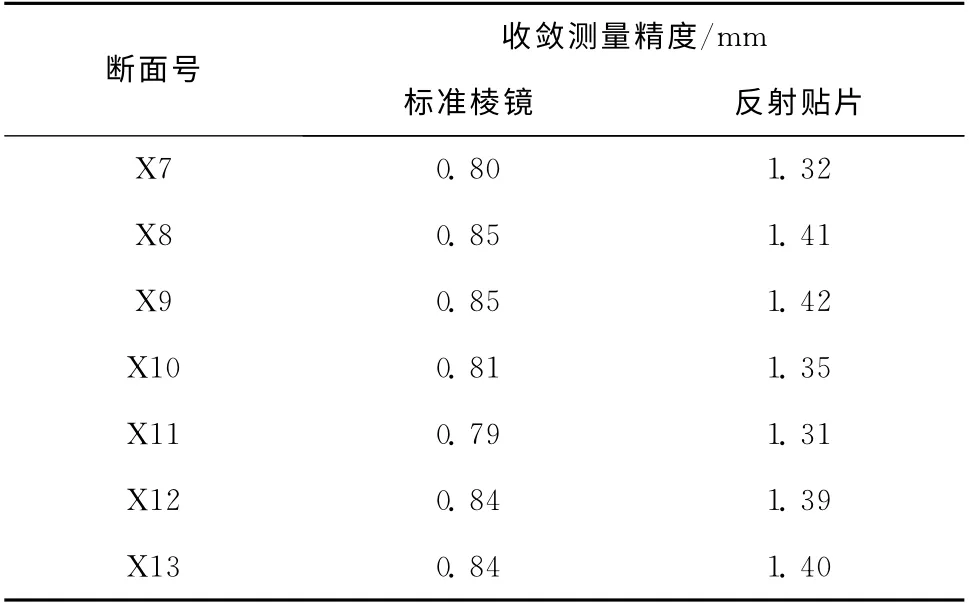
表1 收敛测量精度
由表1可见,若选用Leica标准棱镜,断面收敛测量精度可达到±1.00mm以内;若选用反射贴片,则测量精度可控制在±1.50mm以内。需注意的是,若用反射贴片作测量标志,TM30全站仪ATR模式测程仅约55m,布点时应视情况予以考虑。
3.4.3 变形趋势分析
到目前为止,该项目已经进行了近一年的时间,实时地自动化监测为施工的顺利进行提供了及时准确的数据。基坑施工进度如表2所示。

表2 基坑施工进度

在GeoMoS分析器中,可以根据需要查看各监测点在任意选取时间段内的位移变化情况,如本期变化量、本期变化速率、累积变化量、累积变化速率、平均位移量、平均位移速率及最大点位位移等。为反映变化趋势,这里给出具有一定代表性的下行线部分点的垂直位移、水平位移及断面收敛(均采用日平均值)的变化情况,如图4~6所示。其他断面点的变化情况与此类似,由于篇幅限制这里不再再具体列出。受基坑不同施工阶段的影响,地铁隧道位移会发生相应的变化。GeoMoS分析器中的结果较为明显地体现了这个变化过程:图4(“+”表示下沉,“-”表示上升)中,维护桩和地下连续墙施工阶段,位移变化比较明显,大部分点呈现沉降趋势,小部分点呈现小幅上升;而后自土方开挖以来,由于软土地区的土壤特性和该时期的施工降水的影响,各点点位变化又开始回落且渐趋于平稳。图5水平位移的变化(“+”表示向基坑方向位移,“-”表示向远离基坑方向位移)也明显受基坑施工的影响,与垂直位移变化不同的是,维护桩和地下连续墙施工阶段位移变化在-1.0~2.0mm之间,呈小幅波动状态,变化趋势不明显;土方开挖使得隧道出现了显著的位移槽(2011年10月中旬至2011年11月下旬),前期隧道有向基坑方向位移的趋势,而从2011年11月中旬,由于基坑靠近地铁侧一角第3层土已基本挖到设计标高(-12.20m),故2011年11月中旬到下旬期间隧道呈现向反方向回弹趋势,到2011年12月份水平位移量已基本趋于稳定,最大累计位移量在-3.0mm以内,这与基坑实际施工情况也是相符的。
从图6收敛情况看,土方开挖前由于施工对隧道各断面上的一对收敛监测点影响基本一致,所以收敛变化不明显;土方开挖引起的地下水位和土体应力场的变化使一对收敛监测点的位移情况不一致,致使自土方开挖以来各断面收敛变化呈波动状态,X7、X8、X9断面离基坑最近且靠近基坑边线中间波动最为明显,其中X9断面累积变化量最大;到2012年2月底断面收敛仍未稳定,进一步的分析有待于后续的监测。但总体而言,各断面水平基线均呈现加长趋势,累计变化量均在+4.0mm以内。
根据项目监测控制指标,对于地铁隧道结构垂直位移和水平位移,要求变形量达到±3.3mm进行报警,达到±6.7mm时决定采取适当应变措施,严格控制在±10mm以内。从GeoMoS分析器中的曲线可以看出,最大沉降量不超过3.0mm,最大水平位移量不超过3.3mm,均在要求的范围内。另外从曲线的波动情况看,曲线的最大锯齿不超过1.5mm,从某种意义上也表明该自动化监测精度较高。
4 结束语
随着测绘仪器及相关软件的发展以及地铁工程实时化的监测要求,自动化监测是地铁保护区安全监测的发展方向。GeoMoS软件以其功能强大的监测器和分析器,与徕卡TM30自动全站仪组成自动测量系统,实现整个监测过程的全自动化。本文针对某市地铁保护区自动化监测实例,对地铁隧道的垂直位移、水平位移及收敛测量精度进行分析,并结合基坑施工状况对GeoMoS分析器中的变化曲线图所反映的变化情况和趋势进行了分析。结果表明该自动化监测系统可以达到地铁保护区变形监测的精度要求,且监测速度快,受人为影响少,自动化程度高,真正实现了实时动态监测,监测结果有效地指导了基坑施工,为今后类似工程的变形监测提供参考。
[1]李桂华,黄腾,席广永,等.软土地铁隧道运营期沉降监控研究综述[J].河海大学学报:自然科学版,2011,39(3):277-284.
[2]钟金宁,段伟,田有良.应用TM30进行地铁隧道变形自动监测的研究[J].测绘通报,2011(7):85-88.
[3]卫建东.智能全站仪变形监测系统及其在地铁结构变形监测中的应用[D].郑州:信息工程大学,2002.
[4]张其云,郑宜枫.运营中地铁隧道变形的动态监测方法[J].城市道桥与防洪,2005,7(4):87-89.
[5]于来法.论地下铁道的变形监测[J].测绘通报,2000(5):13-15.
[6]潘国兵,李沁羽,张维.徕卡GeoMoS自动监测系统在滑坡外部变形监测中的应用[J].测绘通报,2010(11):66-67.
[7]刘春,倪涵.GeoMoS自动监测系统与观测数据精度分析[J].水电自动化与大坝监测,2006,30(2):41-44.



