张西童,刘会云,李永强,黄腾达,李有鹏
(河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
车载LiDAR场景中路灯的提取与识别
张西童,刘会云,李永强,黄腾达,李有鹏
(河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
摘要:为解决车载LiDAR城市场景中路灯提取和识别问题,文中提出基于样本的路灯提取算法。先通过人机交互的方式提取路灯的样本参数;再依据数学形态学闭运算提取点云场景中疑似路灯的位置,根据样本参数确定疑似路灯范围并提取疑似路灯点云;然后进行路灯样本和疑似路灯点云的匹配;最后,通过建立路灯样本缓冲区实现路灯判断和提取。通过试验验证,算法不仅可以快速自动提取路灯点云,还能完成路灯单一种类的识别。
关键词:车载LiDAR;路灯样本;路灯提取;种类识别
随着智慧城市进程不断推进,管理者对作为智慧城市地理数据基础的三维数字城市地理数据要求越来越高,准确性、丰富性、实时性已成为城市地理数据的主要特点[1-3]。具有快速、高精度、高密度测量特点的车载LiDAR技术不断发展,为精细度高、更新速度快的城市地理数据采集提供技术支持[4-6]。作为城市街道场景中重要地物之一的路灯,是数字城市建设和智慧城市管理的重要对象;面对车载LiDAR获取的大量点云数据,准确、快速提取路灯点云和识别路灯种类是本文的主要研究内容。
当前的研究中,对于路灯的提取,多与行道树、交通标识牌、线杆等归为杆状地物进行提取[7-10];对于路灯的单独提取,谭贲[11]根据路灯投影密度、外包围盒面积和点云竖直分布特点,提取路灯地物类;杨必胜[12]通过改进的格网化算法,实现路灯和相邻行道树的分离;Li[13]通过提取杆状地物,再对杆状地物进行向上增长,探测灯头点云实现路灯点云的提取。以上算法实现杆状地物或路灯类的初步提取,对点云的完整性和孤立性要求较高,且不能识别路灯种类。本文依据所要提取路灯类的样本参数,通过数学形态学方法提取疑似路灯的位置,将疑似路灯与路灯样本匹配,判断并获取与路灯样本种类一致的路灯点云,实现路灯提取和路灯种类识别。
1路灯样本提取
在同一区域内,尽管路灯数量很多,但在类型上只有有限的几种,因此可以通过提取路灯样本参数,并以此为基础提取测区中所有同型号路灯。本文采用提取路灯结构线的方式来表示路灯样本参数。在提取路灯点云时,以提取的路灯结构线为模糊模型进行匹配提取。在大区域城市道路场景路灯提取中,通过建立路灯样本集,实现不同路灯的提取和识别。

(1)

2路灯提取方法
路灯提取主要分为3个部分:第一部分为疑似路灯粗提取,提取所有疑似路灯的位置及范围内点云;第二部分为路灯样本与疑似路灯点云的粗匹配,主要包括水平位置对齐、高程对齐和主方向对齐;第三部分为路灯的判断与路灯点云的提取。
2.1疑似路灯粗提取
路灯通常为直立杆状地物,且高于周围地物。基于路灯连续竖直杆状地物的特点,将点云数据格网化,并通过数学形态学的闭运算,以单列竖直n层格网作为模板B进行路灯杆位置的粗提取。如图2中路灯,对路灯格网化,通过膨胀算法使部分因遮挡而数据缺失的灯杆上下部连结,再通过腐蚀算法去除竖直连续较短的地物格网,则可以保留路灯及其他疑似路灯杆状部分的格网。通过大量实验和调查验证,路灯杆通常直径为20cm左右,灯杆部数据缺失在50cm以下;因此在格网数学形态学提取路灯杆过程中,采用边长为20cm的格网进行格网化,数据膨胀采用5层格网膨胀,腐蚀模板采用高差为1/2Ph的模板进行腐蚀。若相连竖直格网数远大于路灯高度所含格网数,则直接判断为非所提取路灯类。
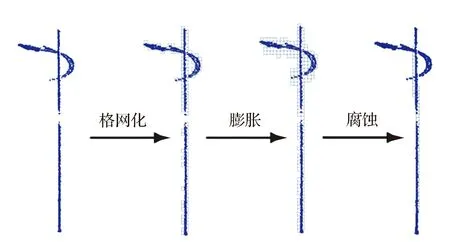
图2 基于数学形态学的疑似路灯位置提取过程
通过提取出来的疑似路灯位置,提取疑似路灯点云。依据粗提取出来的疑似路灯位置水平坐标,选取点云场景中距离疑似路灯位置水平距离1.2倍Hr的点云数据作为疑似路灯点云,0.2m范围内的点云作为疑似路灯杆点云。
2.2样本与点云粗匹配
为进行疑似路灯的判断,需要将路灯样本与疑似路灯点云匹配对齐,即若疑似路灯点云中有与样本一致的路灯,则将样本的灯杆和灯头部分与路灯点云对齐,若非路灯,则样本会与杆状物对齐,灯头部分对齐则是错乱的,在判断过程中会被判断为非路灯点云。路灯样本与点云的对齐主要分为水平位置对齐、高程对齐和主方向对齐。
2.2.1水平位置对齐
即将路灯样本中的灯杆结构线与提取出来的疑似路灯灯杆的杆状地物进行水平方向对齐。依据提取出来的疑似路灯灯杆点云,求其水平重心点作为路灯样本灯杆需要对齐的水平中心点;将路灯样本平移至与疑似路灯杆重合。
2.2.2高程对齐
路灯样本与疑似路灯点云垂直方向上的对齐是路灯灯头部分准确匹配的前提。城市场景中路灯通常是安装在路边花坛或者人行道上,依据城市道路建设规范,路边花坛和人行道通常高于邻接路面20cm和24cm;因此以路灯最邻近的道路路面高程作为路灯底部高程获取的基准,在道路高程的基础上加上路沿高度即为路灯底部高程。通过平移使路灯底部对齐,实现路灯和疑似路灯点云在竖直方向上的对齐。
2.2.3主方向对齐
如图3为截取疑似路灯点云中灯头高度部分的点云水平投影,通过采用RANSAC算法提取直线作为疑似路灯头部点云的主方向(图3虚线)。则疑似点云方向到路灯样本的夹角α 即可求出。由于RANSAC算法提取出来的直线不能判断路灯正反向,因此在判断过程中,如果判断该地物为非路灯,则将夹角设置为α +π后再次判断。

图3 疑以路灯方向探测
2.3匹配与提取
将路灯样本和疑似点云进行初步对齐之后,由于单个路灯高度和倾斜程度存在细小差异,样本和路灯点云并不一定完全匹配,为了在判断过程中得到更加精确的结果,本文通过最小二乘算法将路灯样本和疑似路灯点云进行进一步匹配。依据初步对齐的结果,选取路灯样本线周边r范围内的点云,以其到样本线之间距离为依据使用最小二乘法进行匹配,直至样本线和路灯点云达到最佳贴合。
判断所提取出的疑似路灯地物是否为与样本一致的路灯,主要依据路灯灯头部分的结构进行匹配判断。若所提取的疑似路灯点云地物为路灯,则在距离路灯样本结构线一定范围内含有大量的点云,且这些点云较均匀分布在整条结构线附近;而在此范围之外的一定范围内,因路灯周边一般不允许有遮挡物,则这一区域将含有极少量的点云。对样本结构线分别建立以r1(内侧浅色区域)和r2(外侧深色区域)为半径的缓冲区,如图4(a),若疑似地物为路灯,则在浅色区域内沿结构线方向上较均匀的分布着路灯点云,在深色区域内,较少存在路灯点云,见图4(b)。其中r2=2r1,r1依据灯头尺寸选取。
判断时,为统计点云在样本线方向上的均匀分布情况,本文将较长的结构线进行细分,使每段结构线长度不大于0.2m,则可以通过计算缓冲区内包含点的结构线段数与总数之比来统计点云在结构线方向上的分布情况。通过计算点云在路灯缓冲区(浅色区域)和非路灯缓冲区(深色区域)内的比例来统计点云在空间上的分布情况。即当满足式(2)和式(3)时,疑似地物被判断为与样本一致的路灯。
(2)

(3)
式中:Npoints为包含点云的样本结构线段数;N为样本线段总数;Qlamp为图4(b)中内侧浅色区域点云数量;Qspace为图4(b)中外侧深色区域点云数量。
当判断疑似地物为路灯之后,通过判断点云到路灯结构线的距离来提取路灯点云。距离灯杆结构线小于r1的点云作为灯杆点云;距离灯头结构线小于r2的点云作为灯头点云。
3试验分析
图5为StreetMapper系统采集得到的某城市街道车载点云数据,总长5.2km,除最左端外均为具有绿化隔离带的双向街道,场景中主要包含3种路灯。通过人机交互获取3种路灯样本点云及参数,依据本文算法进行路灯的自动提取和识别。
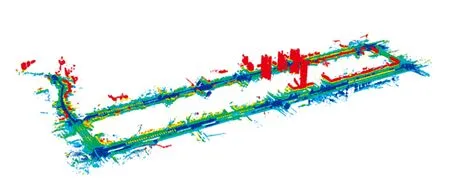
图5 城市街道车载点云数据
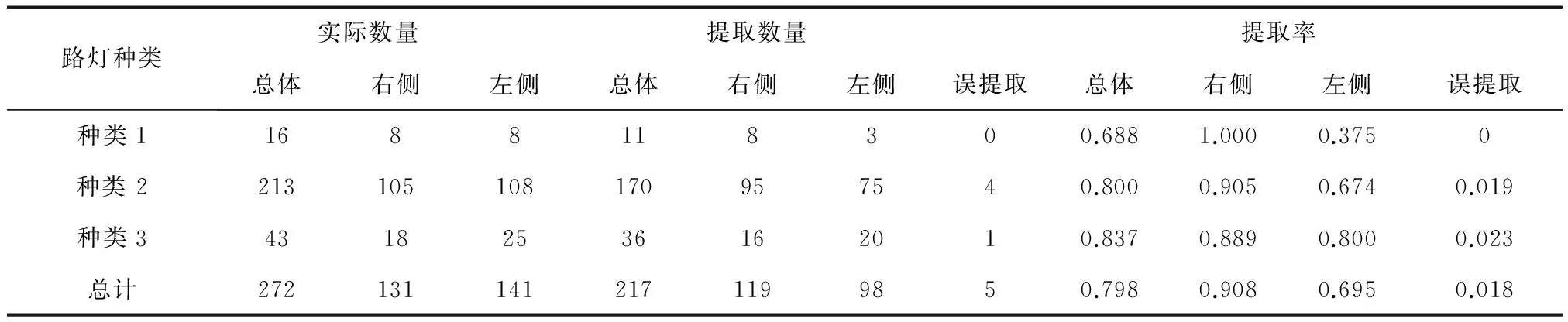
图6为依据本文算法提取出来的路灯位置示意图,图中包括3种路灯的位置和车载轨迹线。统计其提取结果见表1,该区域3种路灯总数272个,提取路灯217个,提取率达79.8%;与扫描仪同侧获取的道路右侧较完整路灯131个,提取路灯119个,提取率达90.8%;与扫描仪对侧获取的道路左侧路
灯141个,提取98个,提取率达69.5%;误将非路灯地物识别为路灯5处,占路灯数1.8%。由数据得出,本文算法对较完整的路灯点云提取效果较好,对不太完整的路灯点云也能达到60%以上的提取率,可以较好进行大场景路灯点云自动提取和路灯种类自动识别。
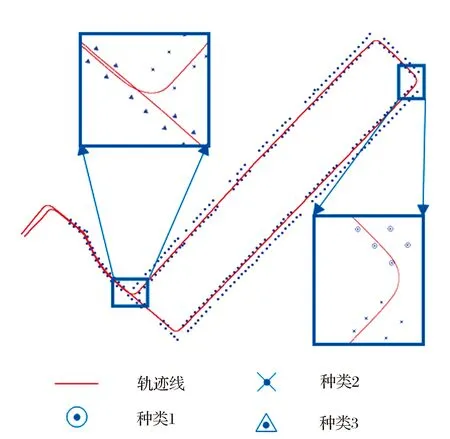
图6 提取的路灯位置
路灯种类实际数量提取数量提取率总体右侧左侧总体右侧左侧误提取总体右侧左侧误提取种类11688118300.6881.0000.3750种类2213105108170957540.8000.9050.6740.019种类343182536162010.8370.8890.8000.023总计2721311412171199850.7980.9080.6950.018
注:右侧为车辆行驶一侧,数据完整;左侧为相邻车道,由于隔离带遮挡,数据质量较差
4结束语
依据本文算法,通过提取较为准确的路灯样本参数,可以将与路灯样本形状大小一致的路灯点云从大场景数据中准确提取出来,其仅需要点云的三维坐标信息即可,具有较强的普适性;对点云部分缺失但不影响外观形状的路灯同样具有较好的提取效果。算法在提取路灯的同时,实现路灯种类的识别,为数字城市建设和城市道路场景监测提供准确的数据,为城市道路资产管理和路灯维护监控提供数据支持。由于提取过程依赖于路灯的形状,因此对于缺失严重导致形状缺失的路灯,不能有效提取,对于严重损坏或倾斜的路灯也不能较好提取。车载LiDAR在获取城市道路数据时,通常会采集到不同的街道数据,不同的街道安装的路灯种类也不尽相同,为了缩短自动提取时间,提高提取准确度,提出通用的路灯提取算法,对识别提取出的路灯进行分类将是作者未来的研究内容。
参考文献:
[1]李德仁,姚远,邵振峰. 智慧城市中的大数据[J]. 武汉大学学报(信息科学版),2014,34(6): 631-640.
[2]王家耀. 大数据时代的智慧城市[J]. 测绘科学,2014(5): 3-7.
[3]李德仁,姚远,邵振峰. 智慧地球时代测绘地理信息学的新使命[J]. 测绘科学,2012,37(6): 5-8.
[4]谭敏.基于车载激光点云数据的路面检测与重建[J].测绘与空间地理信息,2015,38(7): 115-117.
[5]李永强,刘会云,曹鸿,等. 基于空-地多源数据融合的建筑物精细建模研究[J]. 测绘工程,2015,25(8): 1-4.
[6]QinR,GruenA. 3Dchangedetectionatstreetlevelusingmobilelaserscanningpointcloudsandterrestrialimages[J].ISPRSJournalofPhotogrammetryandRemoteSensing. 2014, 90: 23-35.
[7]李永强,杨莎莎,李框宇,等. 车载激光扫描数据中杆状地物提取[J]. 测绘科学,2015,40(8): 42-46.
[8]CABOC,ORDOEZC,GARCA-CORTÉSS,etal.Analgorithmforautomaticdetectionofpole-likestreetfurnitureobjectsfromMobileLaserScannerpointclouds[J].ISPRSJournalofPhotogrammetryandRemoteSensing. 2014, 87: 47-56.
[9]CHENGL,TONGL,WANGY,etal.ExtractionofUrbanPowerLinesfromVehicle-BorneLiDARData[J].RemoteSensing. 2014, 6(4): 3302-3320.
[10]LEHTOMKIM,JAAKKOLAA,HYYPPJ,etal.DetectionofVerticalPole-LikeObjectsinaRoadEnvironmentUsingVehicle-BasedLaserScanningData[J].RemoteSensing. 2010, 2(3): 641-664.
[11] 谭贲,钟若飞,李芹. 车载激光扫描数据的地物分类方法[J]. 遥感学报,2012, 16(1): 50-66.
[12]YANGB,DONGZ,ZHAOG,etal.Hierarchicalextractionofurbanobjectsfrommobilelaserscanningdata[J].ISPRSJournalofPhotogrammetryandRemoteSensing. 2015, 99: 45-57.
[13]DANL.OptimisingDetectionofRoadFurniture(Pole-likeObjects)inMobileLaserScannerData[D].Holland:UniversityofTwente, 2013.
[责任编辑:张德福]
Streetlamp extraction and identification frommobile LiDAR point cloud scenes
ZHANG Xitong, LIU Huiyun, LI Yongqiang, HUANG Tengda, LI Youpeng
(SchoolofSurveyingandLandInformationEngineering,HenanPolytechnicUniversity,Jiaozuo454000,China)
Abstract:To solve the problem of streetlamp extraction and category identification from mobile LiDAR data in urban scenes, an algorithm based on streetlamp sample has been proposed. Firstly, extract the sample from streetlamps by human-computer interaction; secondly, based on morphological closing operation, extract the location of suspected streetlamps, and determine the scope of suspected streetlamps by the streetlamp sample parameters before extracting the suspected streetlamp point cloud; thirdly, realize the alignment of streetlamp samples and suspected streetlamp point cloud; finally, realize the streetlamp judgment and extraction by establishing sample buffer. Experimental results show that the algorithm can not only automatically extract streetlamp point cloud, but also be able to identify streetlamp category which is in accordance with the sample.
Key words:mobile LiDAR; streetlamp sample; streetlamp extraction; category identification
DOI:10.19349/j.cnki.issn1006-7949.2016.09.011
收稿日期:2015-10-19
基金项目:国家自然科学基金资助项目(41501491)
作者简介:张西童(1991—),男,硕士研究生.
中图分类号:P225
文献标识码:A
文章编号:1006-7949(2016)09-0050-05



