高箐阳 渤海大学信息科学与技术学院 辽宁锦州 121000
基于模糊控制的河蟹养殖溶解氧智能控制
高箐阳 渤海大学信息科学与技术学院 辽宁锦州 121000
【文章摘要】
农业智能控制是农业信息处理主要构成成分。农业控制可以优化农业生产过程,保障农业生产各项优异性,因此有效合理的促进农业发展。本文从理论上简述农业智能控制理论核心,即模糊控制。同时也根据该理论进行了基于模糊控制理论的河蟹养殖溶解氧智能控制,并对所得的结果进行了分析和研究。
【关键词】
溶氧量;神经网络控制;模糊控制
0 引言
从人类起源起,农业生产就随人类的发展而不断发展,但发展一直依附于大自然。我国农业正在从传统农业向现代化农业转变,因此农业智能控制作为农业现代化的重要标志受到广泛重视。本文基于农业智能控制理论,对模糊控制理论及对所得到的结果进行了相关的研究和分析。
1 模糊控制理论
农业智能控制是一个大空间、多参数、多目标,并且有强耦合、大滞后的非线性控制系统。常规的控制方法很难获得理想的结果,针对这种情况我们采用模糊控制方法。
1.1模糊控制
模糊控制是一种非线性控制,不需要通过数学建模来获得相关数据,只是根据操作人员的实践经验和实践系统输入输出的结果数据,便能对系统实施实时控制。
1.1.1模糊控制基本原理
模糊控制器原理如图1.1。
注:S:系统设定值;e:系统偏差值;c:偏差变化率:E:模糊量化处理后的偏差值;C: 模糊量化处理后的偏差变化率,U:模糊量的偏差值与偏差变化率经过模糊控制规则近似推理与模糊判决后的控制作用,u:经过反模糊化得出模糊控制器输出精确量的控制作用,y为系统的被控变量。
1.1.2模糊控制规则构建与模糊判决推断
模糊控制器根据语言规则来进行模糊判决,常用模糊控制推理方法:最大-最小推理法过程如图1.2。
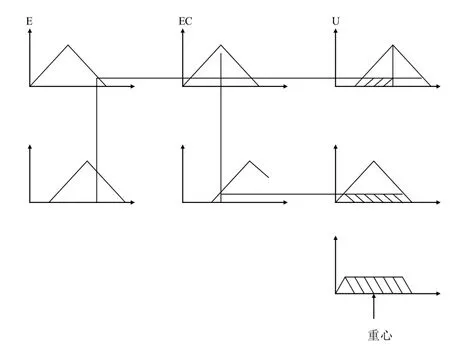
图1.2 最大-最小法模糊推理总过程示意图
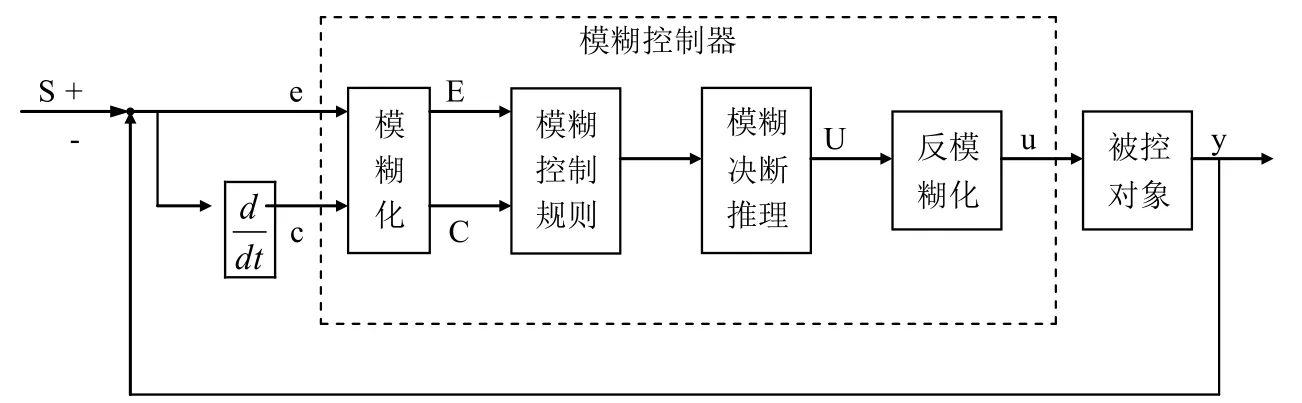
图1.1 模糊控制原理框图
2.1 模糊控制器原理图
根据上图可知最大-最小推理过程分4步:a求出输入量的隶属度。b当存在几个输入量时相同规则中选定输入量隶属度MIN作为前部件隶属度。C前部件隶属度与后部件隶属度函数进行“最小”运算得出结论。d把所得的结论进行取“最大”运算,获得模糊推理结果。
1.1.3计算反模糊化的方法
反模糊化即把语言表示的模糊量还原为精确数值,依照输出模糊子集的隶属度运算出值。

常用的反模糊方法有如下2种:
(1)最大隶属度法
根据其原则的理念,设控制量Um为隶属度MAX的元素,假设则取控制量Um=i,若i不唯一,即如果


则取

为控制量。
(2)加权平均法
a、心法,其表达式如下:
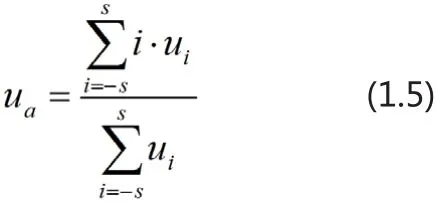
c、加权平均法,其表达式如下:
式中,权系数ki是根据农业领域具体情况确定的。当ki=ui时重心法和加权平均法等价。
2 基于模糊控制的河蟹养殖溶解氧智能控制
现多数河蟹养殖户通过观察阳光、气温及河蟹是否爬上水草等现象决定是否开启制氧机。尽管可控制水中溶解氧含量,但工作强度大,人工成本高。因此需要先进的水中溶解氧自动监控系统。下面内容论述了该过程的具体实现途径,以及对所得结果的分析和研究。
2.1模糊控制器变量的选择
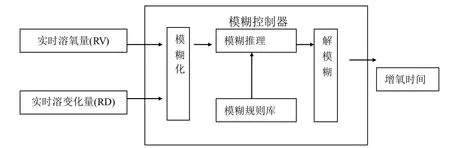
模糊控制思想就是模拟人在养殖过程中的思想,获得更精确的控制参数,提高养殖水平。图3.1为模糊控制器的结构原理图,其中选取实时溶氧量(RV)和实时溶氧变化量(RD)作为监控器的输入,输出变量为增氧时间(T),再选取对应的模糊控制规则,就可取得较好的动态特性和静态品质。
2.2模糊控制策略
为了保证实验数据的精确度,用三变量定义五个语言变量:很小(VL)、小(L)、中(M)、大(H)、很大(VH)。在本实验中选择隶属函数(MF)的形式为三角形MF的形式。图2.2为实时溶氧量隶属函数。

图2.2 实时溶氧量隶属函数
2.2.1模糊化
确定输入和输出量动态区间和它对模糊语言变量的论域,即实时溶氧基本变化区间为[0,14],选定的论域为X={0,3,6,9,12}。
2.2.1模糊推理
当实时溶氧量超过10mg/L时,水体含氧量充足,没有必要做增氧的工作,写出的迷糊推理规则即为“if RV is VH then T is VL”。具体的模糊推理库如下表2.1。

表2.1 增氧时间推理规则
2.2.3解模糊
根据模糊推理所得结果乘比例因子得到系统所需要控制量的精准输出值。本系统选取质量中心法去模糊化,得到增氧机开启时间。
2.3智能控制实验方案与结论分析
2.3.1智能控制试验方案
取两个相邻的水质相同的池塘进行实验,1号池塘采用模糊控制,2号池塘未采用模糊控制。
方案1:在天气相似且在溶氧浓度为5.5mg/L的几天内,对两个池塘分别采用不同的控制方式,即1号池塘先增氧20分钟,溶氧含量为5.5mg/L时在连续增氧30分钟;二号池塘连续增氧60分钟。
方案2:在7月24日到7月26日之间对1号池塘采用模糊控制,对2号池塘不采用任何控制手段,然后对两个池塘进行增氧并记录这段时间内的溶氧量变化情况数据。在7 月19-31这三天时间里取消对1号池塘的模糊控制,且与2号池塘对比该段时间内氧容量变化情况数据。
2.3.2智能控制试验结果及分析
方案1得到数据做出折线图,如图2.3。
由图2.3所得第2种好于第1种方式。该结果表明根据溶氧量浓度实时调整的方案即有良好的控制效果又节省能源。
方案2的实验数据,绘制的7月24-26日溶氧浓度变化情况如图2.4。
7月24-26日与7月29-31日1号池塘溶氧量的变化情况如图3.5。
从对比结果可以看出在启用模糊控制以后溶氧量的衰减速率程减缓趋势,溶氧量浓度的最小值被提高了1.5-2mg/L。
根据实验结果分析可得,启用模糊控制,根据溶氧量浓度实时调整控制策略,可以保证河蟹在生长过程中有一个充裕氧容量的环境,且节约电能,符合目前环保思想。同时也可以解放劳动力,降低养殖成本,提高河蟹的质量和数量,增加养殖户的收入,提高人们的物质生活水平。
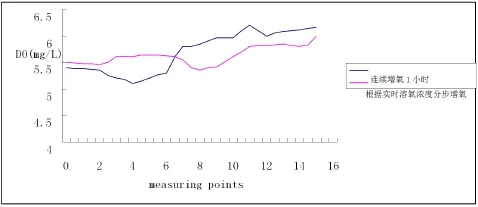
图2.3 两种增氧方法比较
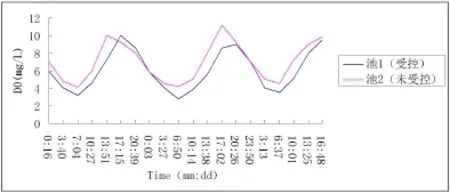
图2.4 7月24-26溶氧浓度变化情况
3 结论
本文采用模糊控制理论,经过对河蟹养殖的实例研究,分析其不同时间段里水中溶氧量的浓度变化,得出模糊控制对河蟹养殖的优势,证明模糊控制的合理性、实效性与可行性等。
【参考文献】
[1]陈佳佳,梁永明,任晓杰等;智能空调控制农业温室生产温湿度的现状分析与设计构想[J].中国科技博览.2011(34):222-222.
[2]刘方,栗震霄;我国农业温室控制系统控制模式的研究[J].农机化研究所,2008 (10):223-226
高箐阳(1994—),女,辽宁本溪人,渤海大学信息科学与技术学院2012级软件服务与外包专业本科生,研究方向:物联网
【作者简介】



