张哲深 王春达 李宁 张全禹绥化学院电气工程学院 黑龙江绥化 152061
基于STM32的无人机喷洒系统
张哲深王春达李宁张全禹
绥化学院电气工程学院黑龙江绥化152061
项目来源:黑龙江2015年省级大学生创新创业训练计划项目
【文章摘要】
介绍了一种基于STM32控制器的农田喷洒系统,通过使用新型的飞控PIX,以及改良硬件设施,对姿态角的控制,提高了无人飞行器的续航能力,简化了操作,方便农业使用,使农耕人员能在较短时间内掌握该设备的使用方法,只要选择农田环境以及设置需要的喷洒量就可以进行农田喷洒作业。
【关键词】
六旋翼无人机;飞控PIX;姿态角;直流水泵
0 前言
我国人口众多,农业在我国有着重要的地位。我国地域广阔,虫害有着较大的迁徙性和流动性,害虫的防治较为复杂,需要大量的专业农药喷洒人员。但由于农村人口流动量较大,农村人口逐年减少,难以找出较多的专业农药喷洒人员。现有农耕人员,由于缺乏农药喷洒方面的相关知识,造成农药喷洒的效果不理想,而且农耕人员在农药喷洒后不能及时清洗,对人的身体造成危害,存在安全隐患。为解决以上问题,设计了以STM32F4微型控制器为控制核心,以六旋翼无人机为载体的喷洒系统。
1 系统设计及要求
系统设计框图如图1所示。具体要求如下:
(1)控制无人机飞行高度,航速,倾斜角度等;
(2)调整农药喷洒量,喷洒速率等;
(3)将无人机周围环境的反馈量返回控制台,并将控制台处理数据交给无人机形成系统通信;
(4)无人机可以切换模式,如自稳,定高,定点,悬停,绕圈,自动等模式。
无人飞行器由于机体轻盈,容易受到周围环境的干扰,导致飞行事故。所以通过控制台接受飞行环境数据,用以调整飞行姿态。可改变模式,以应对各种不同喷洒环境,比如定高定点模式,可以使飞行器在同一平面上飞行或某一固定点悬停;绕圈模式可以使飞行器在一个圆周上飞行;自动模式则是可以按照控制台预设飞行计划飞行。
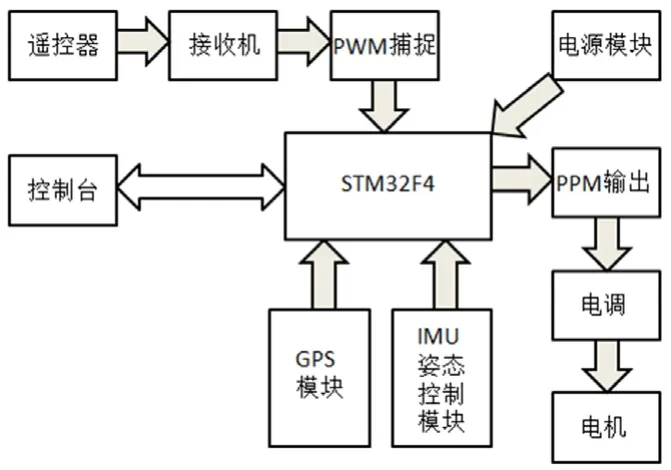
图1 系统设计框图
2 硬件部分
2.1飞行控制系统设计
飞行控制部分使用的是3DR公司生产的PIX飞行控制器,硬件部分如图2所示。MCU采用STM32F4,该控制器具有多达2MB的FLASH存储器,256KB的数据存储器以及串口总线,12位ADC等丰富资源。飞控可以拥有14路PWM。传感器采用ST公司小型L3GD20H 16 bit陀螺芯片,LSM303D 14 bit加速度/磁场芯片以及MEAS公司MS5611气压芯片。
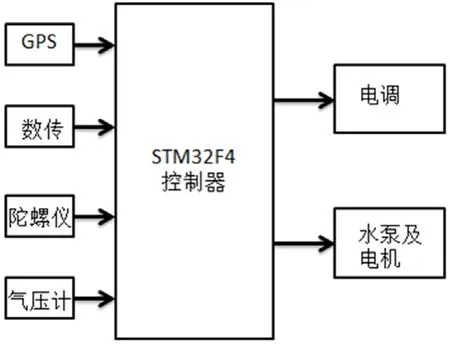
图2 飞行控制硬件部分
L3GD20H是一个三轴角速度传感器,特点是功率低。它含有一个传感元件与一个IC接口,能够通过数据接口与外界环境检测到的角速度进行通信。使用的是CMOS设计工艺,是一种高水平集成元件,通过修正电路,根据特性制造IC接口以更好地匹配传感元件。L3GD20H为了用户能够测量贷款速率,配备了满刻度的±245 /±500 /±2000 dps。其可操作温度在零下40℃至零上85℃之间,采用LGA封装。
LSM303D上集成了三轴加速度传感器和三轴磁感应传感器,芯片尺寸小,线性加速度的测量范围在±2G到±16G之间,磁场强度测试范围从±1.3Gs到±8Gs之间,量程可以自行选择。芯片在计算能力上较为精确,功耗较低,芯片内置提供了高速与低速两种I2C串行通信方式。
2.2硬件电路模块
2.2.1电机
电机采用了战神MX3508,专为多旋翼设计的无刷电机,扁平设计,多槽极外转子无刷电机,扭矩大,效率高。电机直径:42mm,电机长度(无轴):24mm,定子直径:35mm,定子长度:8mm,轴:4mm,重量:90,电池:3-6Cells,空载电流:0.3A,图3为电机实物图。

图3 电机实物图
2.2.2无刷电调
由于采用了无刷电机,使用了好盈乐天40A的电调,油门响应速度快,可支持刷新率高达621Hz 的油门信号,兼容各种飞控,持续输出电流40安,重量26克。
好盈乐天40A电调内部使用了NCP5106B芯片,是NMOS全桥高低端驱动器,其示意图如图2.1所示。NMOS低端驱动,即根据NMOS的特性,Vgs大于一定的值就会导通,当源极接地时,只要栅极电压达到4V左右就可以导通了。当Vgs小于一定值,也会导通,即为NMOS高端驱动,两种驱动方式可以更好的驱动电机。图4为好盈乐天40A电调内部构造原理图。
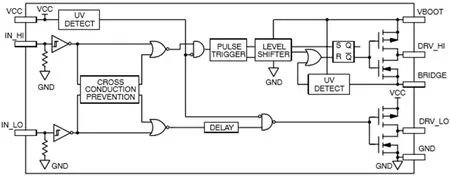
图4 电调内部构造原理图

图5 喷杆示意图
2.2.3水泵及喷杆
为了喷洒农药,要采取大功率水泵,保证喷洒压力。还要保证耗电量,以保持长时间喷洒,为此我们选择了大功率的洗车泵,压力在0.5-0.6MPa,流量4L-4.8L,电压24V,电流2.5A,满足选择要求,并且体积较小、重量较轻,方便于安装在无人飞行器上。喷杆既要满足喷洒量的需求,也要与水泵相匹配,并且结实耐用,方便安装于飞行器上。于是我们选用了不锈钢的四喷头喷杆,可以进行雾状喷洒,喷洒范围大。图5为喷杆示意图。
3 软件部分
软件部分使用的是德国KEIL公司研发的MDK开发工具。系统由STM32F4微型控制器读取外部传感器传入信息,解读姿态角,以姿态角与控制信息综合解算,传送给六个无刷电机,完成六轴无人飞行器的飞行控制。其中六轴无人飞行器的姿态角采用四元素方法获得,在打开电源正常工作的情况下,角度误差控制在2%以内,基本满足控制需求。软件流程图如图6所示。
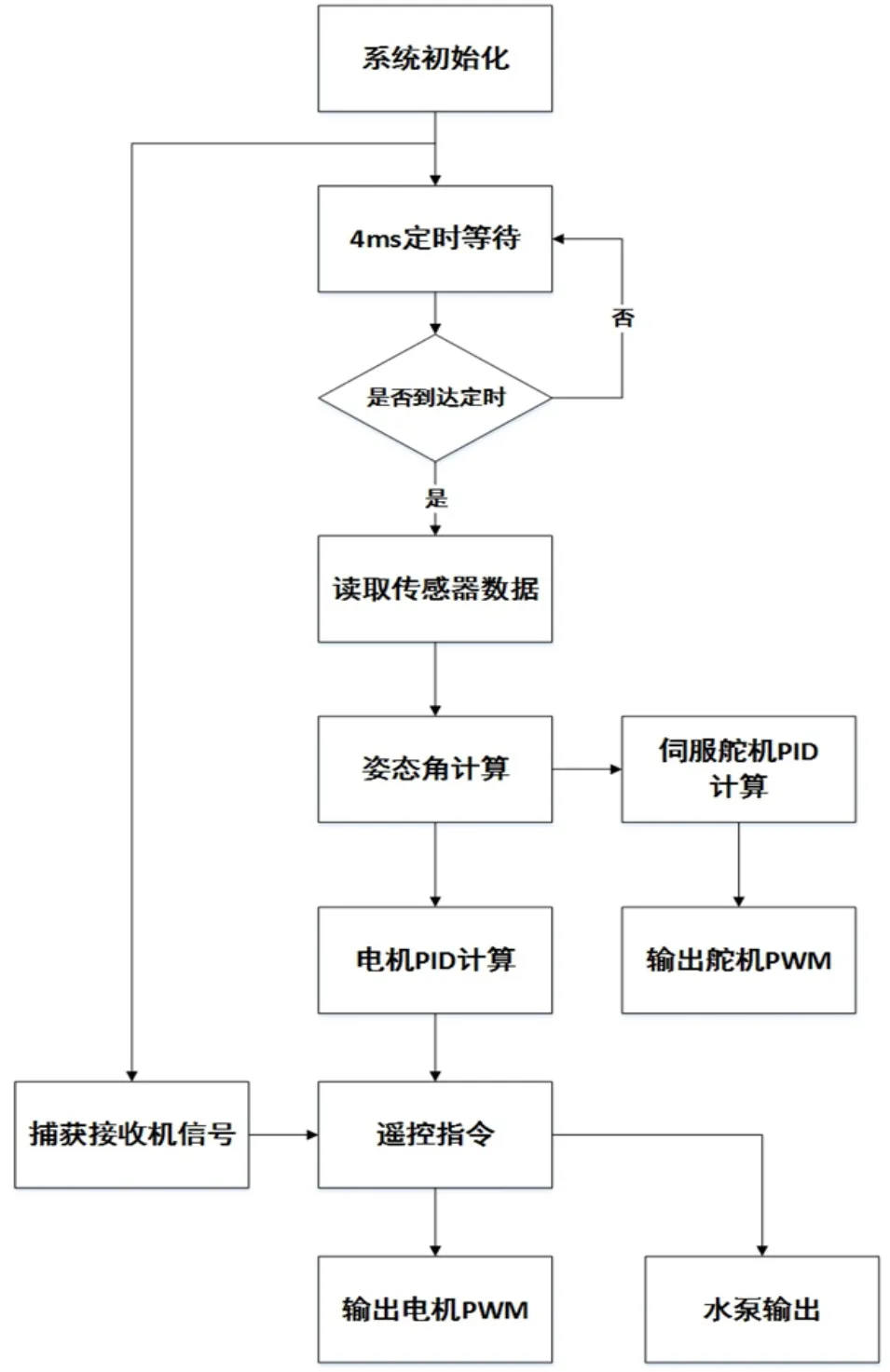
图6 软件流程图
4 实验与结果分析
4.1实验数据
按照系统软件流程图,通过调整参数及程序,减小误差,确定了以下试验内容,测试时喷洒设为两档(实际工作模式为旋钮模式,即喷洒速度可以在两种模式中间任意变化),低速喷洒以及全速喷洒,在不同的模式下测试飞行反应时间,飞行总时长以及流量大小。
(1)低速模式,系统稳定启动后,喷洒运行20S,以此测试流量大小。数据如表1所示。
(2)全速模式,系统稳定启动后,喷洒运行20s,以此测试流量大小。数据如表2所示。
(3)系统从打开电源计时,飞行方式设为自动,用以测试飞机启动时间以及飞机飞行的极限时间。数据如表3所示。
4.2实验数据分析
低速模式中测试了三次,喷洒量按照L/ min计算平均值为0.143 L/min,全速模式中的平均值为1.49 L/min,飞机设计时使用载重量为5L的农药桶, 在低速模式中可以喷洒34.97分钟,全速模式中可以喷洒3.36分钟。按照我国农业需求,以每平方米需要12g农药为例,5KG农药即可满足417m2农田的喷洒需求。飞行器可以持续飞行大约1小时,启动时间在1分钟左右,按照低速喷洒可以中途换药桶并且能完成两次喷洒,足够满足我国农业上农药喷洒的需求。
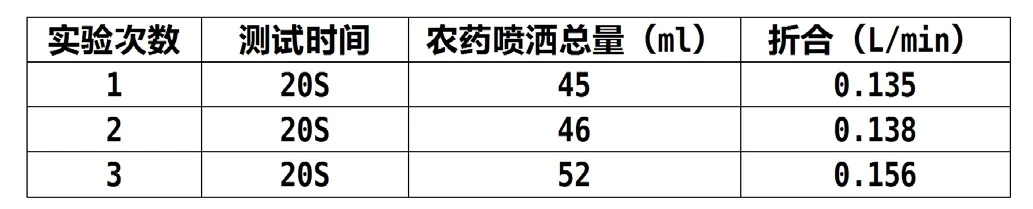
表1 低速模式
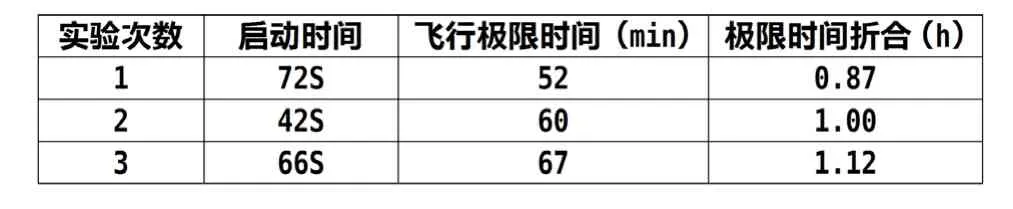
表2 全速模式
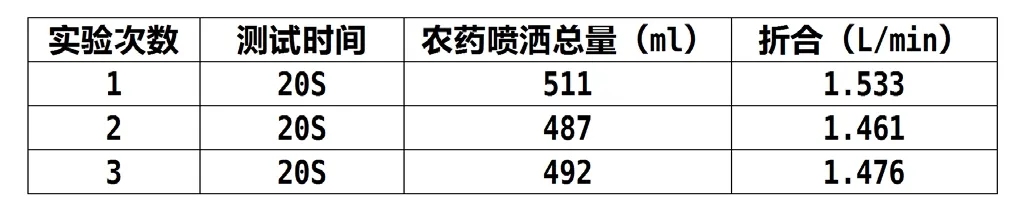
表3 飞行测试
5 结束语
本文设计了一种基于STM32的无人机喷洒系统,实现了农业喷洒的可控性,准确性。根据调整参数可以改变流量,使用起来方便可靠,并且操作简单。通过简单地程序设计可以完成多种飞行方式,应对不同的农耕需求以及不同的地域环境。控制台设计符合人性化,未经过培训的农耕人员也可以在数小时之内掌握该系统的控制方式,并且熟练操作。
【参考文献】
[1]王双怀. 新时期我国农业发展的机遇和挑战[J]. 陕西师范大学学报:哲学社会科学版, 2003(6):85-91.
[2]王燕路, 陈永真, 王洪宝. 降压型DC-DC变换器低端驱动的研究[J]. 辽宁工业大学学报:自然科学版, 2015(1):16-20.
[3]孙冬梅, 田增山, 韩令军. 捷联惯导系统中四元素法求解姿态角仿真模拟[J]. 弹箭与制导学报, 2009, 29(1):51-53.
[4]关越魏, 何波贤, 于仁清,等. 基于四元数解算陀螺仪姿态角算法的实现[J]. 电脑编程技巧与维护, 2015(9):32-34.
【作者简介】
张哲深(1995-),男,绥化学院大学生,曾参加了全国电子设计竞赛,获黑龙江赛区大赛一等奖。
通讯作者:张全禹(1984-),男,汉,硕士,主要研究方向为电路与系统设计。



