吴海都,杨德兴,卢东泳,江鹏杰,高煜登,熊银苟
(广州工商学院,广东广州,510800)
0 前言
当前,治理观赏性水域已经得到了社会各界的广大关注。随着科技的进步和人们对自然环境保护意识和要求的不断提高,研制出一种结构简单、安全平稳、节能高效的远程操控清洁工具已成为一大热点。为了解决小型景区湖泊水面垃圾问题,以STC15W4K58S4 单片机为核心,融合了无线远程操控,无线图像传输,传送带式捕获垃圾等功能,设计出这样一款清理装置模型—小卫士。
目前,小卫士主要针对水面漂浮物将其收集、运送、装载,全过程只需人在湖边遥控小卫士,就可做到定点回收湖面上的垃圾,且其工作不对环境造成污染。
1 小卫士系统主要结构组成
小卫士主要由船体、电气控制系统、水面漂浮物打捞系统、水面视频监测系统四个部分组成。
■1.1 船体介绍
船体设计:小卫士采用双体船设计。该船型具有两个分开的独立体,每个独立体均设计成下尖型,使船头形成一个W 型如图1 所示,其作用可以起到减少小卫士前进时的水流阻力,也使得水线面的横向惯性矩增加,由于细长的船体横摇时回复力矩小,很容易左右摇晃,但是双体船分为左右两个独立体,下尖型船底的设计又使得船体的重心上移,二者合一使得小卫士的复原力矩很大、稳性极好、稳性储备比单体船大2~4 倍、抗风力强[1]。双体船的设计也使得船的中部形成一条贯通整船的天然流道,为垃圾清理装置提供理想的安装位置。独立体的上方是一个回字形的塑料壳如图2 所示,用来存放小卫士的电源模块和控制电路。
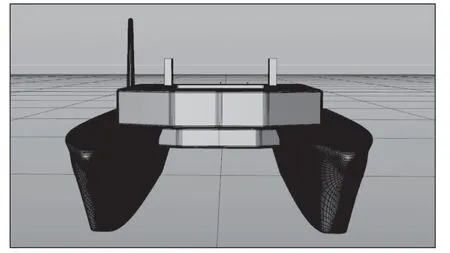
图1 船体的结构图
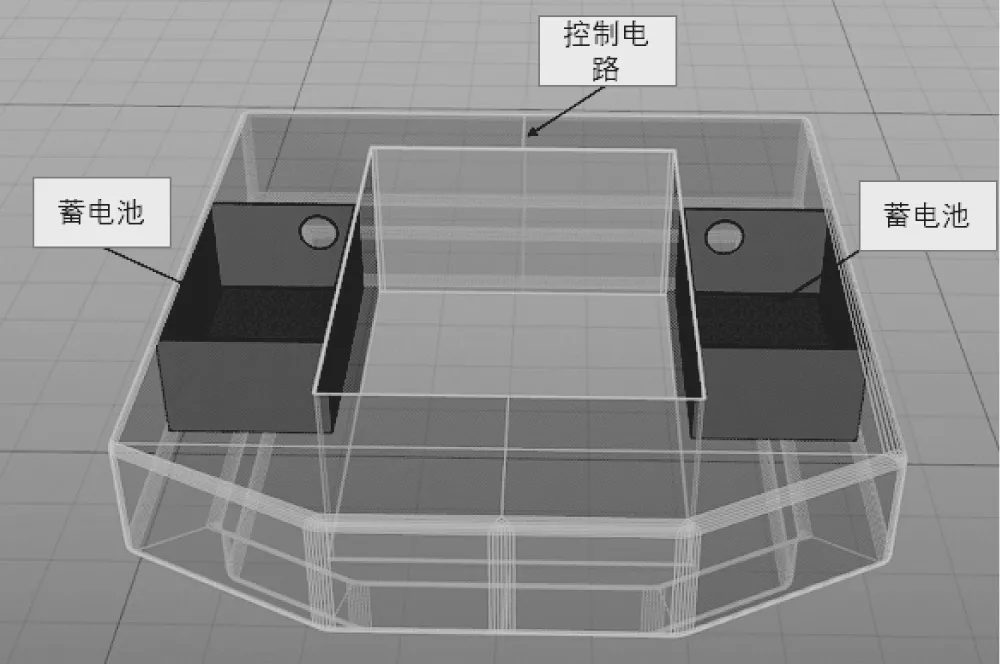
图2
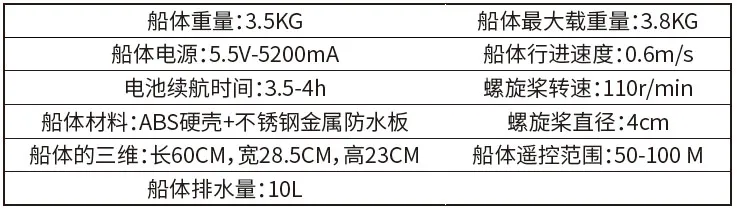
表1 船体性能参数
■1.2 电气控制系统
电气控制系统由电源模块,MCU 模块,红外接收模块和驱动模块这四部分组成。如图3 所示。
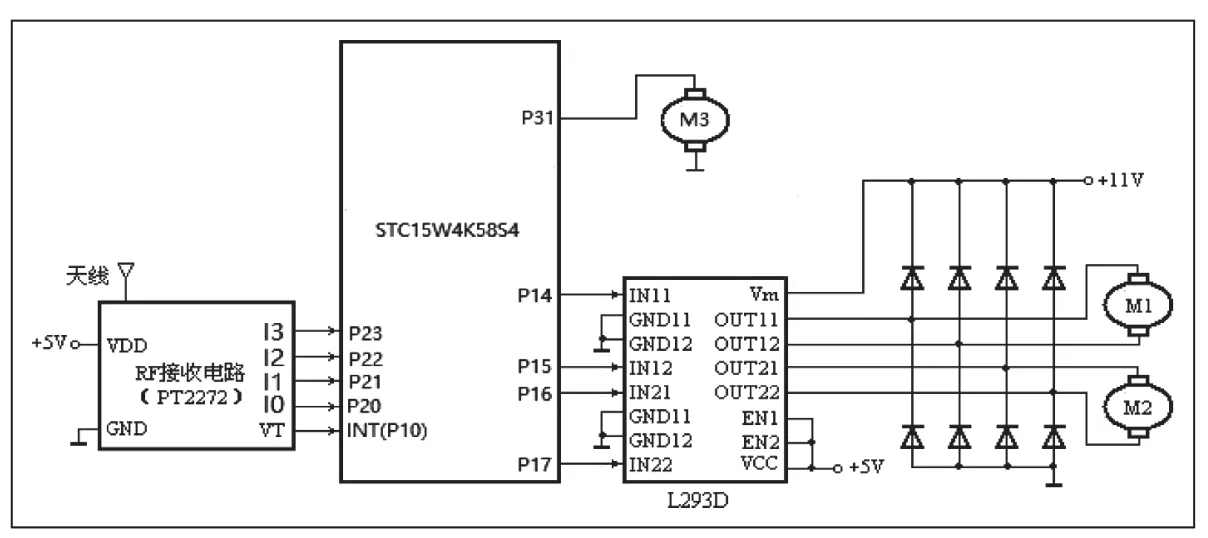
图3
1.2.1 电源模块
装备有多块聚合物锂电池和一块太阳能电池板,为小卫士供电。整个系统的供电以可充电锂电池电为主,以太阳能电池板发电补充电能为辅的系统。本系统采用单晶硅太阳能电池板吸收太阳光转换成电能,其转换效率比其他类型的太阳能电池板更高,并且使用寿命也较长,可以大大提高太阳光的有效利用率和系统的稳定性。如果白天有阳光,就可以用太阳能发电同时给蓄电池充电,到天黑时蓄电池放电,减少用市电补充能量的部分。在我国大部分地区,全年基本上都有三分之二以上的晴朗天气,这样该系统全年就有三分之二以上的时间用太阳能,剩余时间用市电补充能量,能够有着显着的节能减排效果,达到设计环保的初衷。小卫士系统供电设计流程图如图4 所示。
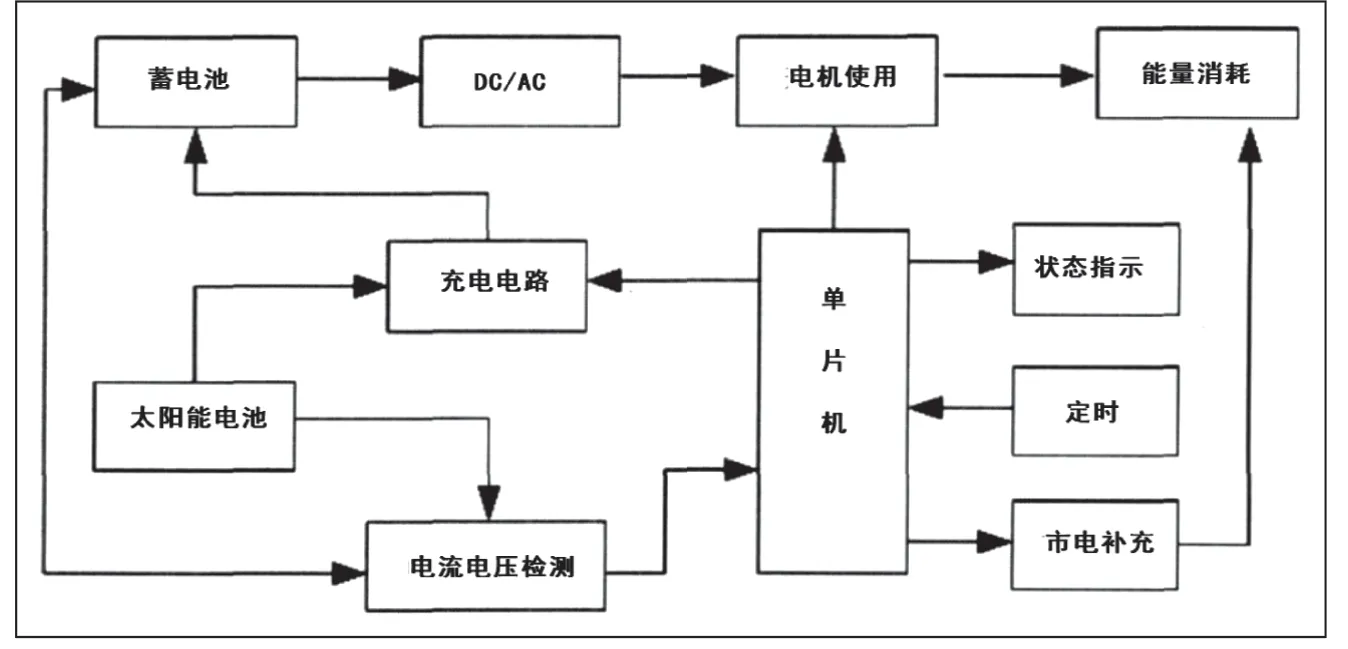
图4 系统供电设计流程图
1.2.2 MCU 模块
核心控制单元是采用宏晶科技公司制造的STC15 系列的STC15W4K58S4 芯片,该芯片不需要外部晶振和外部复位电路,内部时钟在5MHz~30MHz 可设,可工作的宽电压为2.5~5.5V。其具有超强的抗干扰能力、运行速度快、低功耗、成本低等优点。且该单片还内置了稳压模块,使得在小卫士在电源供给的稳定性有了极大的保障。
1.2.3 无线数据传输模块
目前,无线数据的传输,常见的有两种方案。方案一:较近距离的使用红外线传输;方案二:较远距离的采用射频传输。针对小卫士的工作范围,本设计采用方案二。
射频传输包括数据发射电路和数据接收电路。
数据发射电路由按键,编码芯片PT2262,315MHz 无线数据发射模块等构成,基于这个发射电路制成一个六路无线遥控器。数据发射端的工作频率为315MHz,采用声表谐振器SAW 稳频,其频率稳定度仅次于晶体,超过一般的LC振荡器,并且声表振荡器的谐振损耗仅 1~2dB[2]。
数据发射电路的工作流程图如图5 所示。通过触发遥控器上的按键发出信号,该信号经过PT2262 编码器输出一个由地址码、数据码、同步码组成的一个完整码字,再到315MHz 无线数据发射模块进行调幅、功率放大,最后将已调信号通过天线辐射出去。
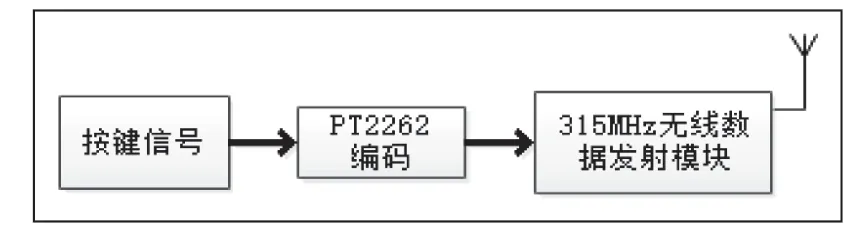
图5 数据发射电路流程图
数据接收电路由315MHz 无线数据接收模块和译码芯片PT2272 构成。315MHz 无线数据接收模块有超再生式接收模块和超外差式接收模块两种,考虑到小卫士的工作环境不是非常恶劣,为了降低成本采用315M 超再生接收模块。该接收模块具有结构简单、低成本、低功耗等优点。
数据接收电路的工作流程图如图6 所示。当315MHz超再生接收模块上的天线接收到无线遥控器发出的信号后,对该信号进行功率放大后送至译码器PT2272 进行译码,其地址码要经过两次比较核对,若结果一致,则VT 脚才输出高电平,同时,相应的数据脚也输出高电平送至单片机进行下一步处理。
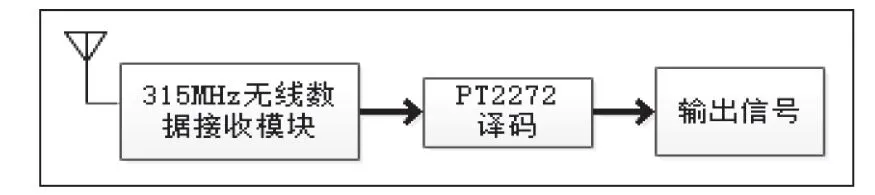
图6 数据接收电路流程图
本设计将315MHz 无线数据发射模块和PT2262 编码器集成在一块,该六路无线遥控电路图如图7 所示。并将315MHz 超再生接收模块和PT2272 编码器集成在一块,其引脚图如图7 所示。
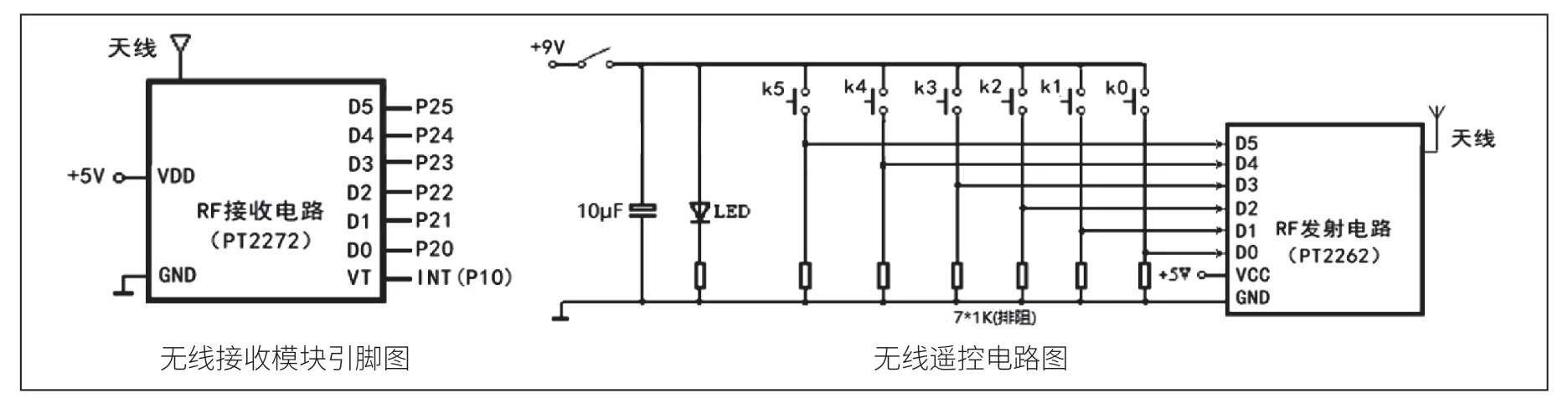
图7
1.2.4 驱动模块
驱动模块采用L293D 电机驱动拓展板。L293D 是一块双H 桥驱动芯片,可同时驱动2 路直流电机,并可实现电机的正转与反转,实现此功能只需改变输入端的逻辑电平。该芯片在4.5V 至36V 的电压下提供高达600mA 的双向驱动电流,峰值输出电流每通道可达到1.2A,其内部还自带着ESD 保护。且该模块:性价比高,易于控制,且无需保护电路和二极管也无需散热片。

表2 工作逻辑表

■1.3 水面漂浮物打捞系统
1.3.1 传送动力模块
主要采用舵机,是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其优点是用单片机作为舵机的控制单元,使PWM 信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM 信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
1.3.2 传动轴与固紧支架的结构
传动轴与固紧支架成框架式结构,大部分是用尼龙透明树脂材料加工而成,如图8 所示。
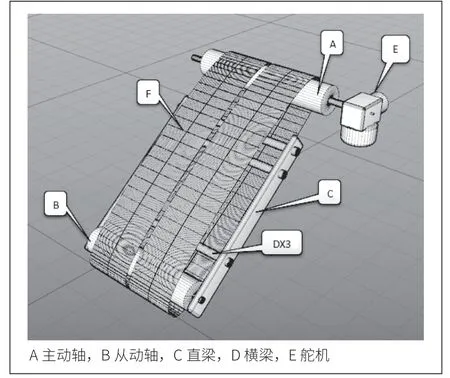
图8 传动轴与固定支架框架式结构图
1.3.3 安装位置
采用是中置收集法,在船体中部安装固定收集部分。其优点是有较大的安装选择余地,收集设备的安装和拆卸都比较方便。因此传轴动与固紧支架安装在两个独立体和图2的框架中空的部分。为了便于垃圾回收,支架安装倾斜的角度呈30°角。
1.3.4 打捞装置
主要采用传送带式聚集装置。其外形与履带类似,材料选择以减轻重量并防止生锈为主,采用3D 打印制作,模型效果如图8 所示。传送带采用尼龙材料,首端浸入水面合适深度,并与水面构成适当的倾角,传送带上还设置了一些细小的颗粒状无,增加传送带的摩擦力,以防止工作时垃圾从传送带上滚落。
舵机的转轴与传送带的主动轴连接在一起,同时在其两侧安装固定板。舵机工作时带动主动轴转动,通过传送带的牵拉带动从动轴一同转动,将水域中垃圾捞起传送至后方的垃圾筐中,筐的底部有多个小洞,可以滤掉附着在垃圾上的水。小卫士可以一边航行一边收集垃圾,同时将垃圾输送到存储部分,不需要将船体停止航行后再对垃圾进行处理,可以连续作业,保持较高的收集效率。
打捞装置的安装效果图如图9 所示。
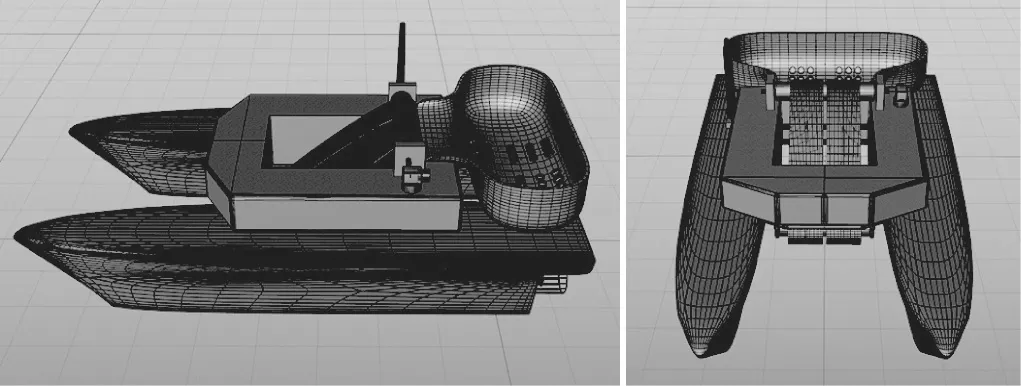
图9 传送装置的3D 图
■1.4 水面视频监测系统
监测系统由MCU 模块、摄像头模块、TF 卡储存模块、Wi-Fi 模块和电源模块这五部分构成,共同组成一个小型无线摄像头。
MCU 模块选用STM32F103ZET6 单片机,负责视频数据的采集与传输;Wifi 模块采用USR-C322,该模块可以实现UART 转Wi-Fi 双向透传功能;摄像头模块采用OV7670图像传感器,其体积小、工作电压低,通过SCCB 总线控制,可以输出整帧、取窗口、子采样方式的各种分辨率为8 位图像数据。TF 卡储存模块采用Micro SD 卡模块和一张4G的SD 卡组成,实现数据的储存;电源由内置可充电锂电池提供。其结构图如图10 所示。
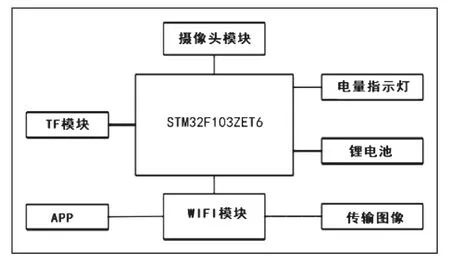
图10 视频监测系统结构图
小卫士工作时,工作人员将设计好的小型无线摄像头安装至船体前方,通过专用手机APP 进行无线连接,在岸边即可通过手机观察到无线摄像头传输过来的的视频图像,实现远程监测水域坏境,精确引导工作人员操作小卫士抵达漂浮垃圾的所在地,进而提高小卫士的工作效率。
2 系统整体工作流程
打开开关,启动小卫士,连接小卫士船上的无线高清摄像头,通过手机观察湖面上的垃圾的所在地方,向前推动无线遥控器上的摇杆,小卫士上的接收天线接收到遥控器发出的前进信号,通过STC15W4K58S4 单片机进行整合处理,小卫士后方的两个直流电开始工作,推动小卫士前进,若小卫士前进的路径有障碍物,则可通过向左(右)推动遥控器上的摇杆,使得小卫士后方的直流电机左电机减速,右电机保持前进的速度(左电机保持前进的速度,右电机减速),做差速运动,从而规避障碍物。
当小卫士抵达湖面垃圾所在的位置,通过遥控器上设置好的按键,启动传送带上的直流减速电机带动传送带,水面漂浮垃圾就会被传送到小卫士上面的后半部分的专用垃圾舱内。传送带传送水面垃圾伴随着船体的运动同时进行,增加了水面的清理效率,船舱储存满了之后,将垃圾运送至岸上做进一步处理。
小卫士的工作流程图如图11 所示。
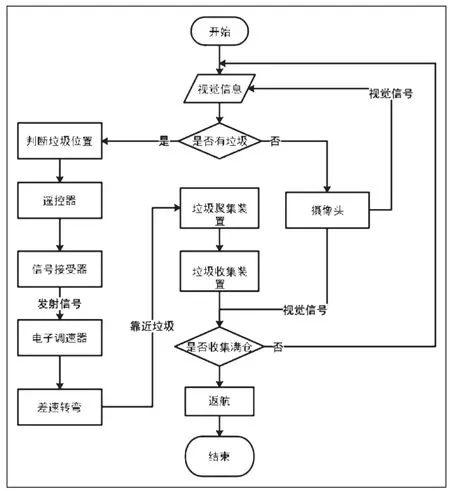
图11 工作流程图
3 总结
虽然所设计的系统硬件和软件程序达到了预期的功能,但也取得了一定的成绩。但从系统最终的功能需求来看,仍有一些方面有待改进和深入研究:
(1)选用高性能51 单片机作为微控制器,其片上RAM 与现有的ARM 控制器相比有明显的缺点。在以后的工作中,应考虑采用主流的32 位ARM 控制器来提高系统的运行效率和分析能力。
(2)本设计所设计用到材料是为ABS 塑胶,在强度方面并不是最优选择,可以选择金属材质来提高强度。
(3)虽然此次模拟实验成功了,但实际运行环境复杂多变,仍需在实际环境下进行进一步的实验,以验证实验结果的稳定性。
(4)当无线通信模块相互传输数据时,可以进一步优化它们的同步,提高数据传输的精度。



