鞠强
(中海电信有限公司大连分公司,辽宁大连,116001)
车牌识别(Vehicle License Plate Recognition,VLPR)是现代智能交通系统中的重要组成部分之一,应用十分广泛。它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。通过一些后续处理手段可以实现船舶车辆自动化监管等功能。对于维护交通安全和船舶安全,加强绩效管理,实现船舶交通自动化管理有着现实的意义。
1 车牌识别技术的现状
早在上个世纪九十年代初,汽车身份识别已经引起了全世界的广泛重视,人们开始研究有关汽车身份证―汽车牌照自动识别的相关问题。几年后,汽车的另一个重要的身份象征―汽车标志识别也成为了热门话题。车牌识别的一般途径为:采用计算机图象处理技术对车牌进行分析后,自动提取车牌信息以确定车牌号。车标识别则基于边缘直方图和模板匹配相关系数混合的算法。目前车牌与车标识别的理论已经成熟,离线算法识别率已经达到较高的水平,同时正向着集成化、智能化方向发展。
汽车身份识别相当于VC++中的“基类”地位,即智能化交通管理系统中的其他子模块需要在汽车身份识别的基础上进行继承和发展。所以我们认为,汽车身份识别要求较高的集成度,最好能由可以嵌入到其他系统中的、集成度高的模块来完成,如单片机、CPLD。
我们小组选择了嵌入式汽车身份自动识别系统作为我们本次创新实验计划的选题。我们计划以嵌入式完成汽车身份识别后,将处理完的数字信息传递到智能化交通管理系统的其他模块中。用嵌入式代替电脑处理汽车身份识别将大大提高智能化交通管理系统的集成度,降低成本。区别于单一的识别系统,我们设计完成的汽车身份识别系统将车牌识别与车标识别相结合,并辅以汽车颜色识别。
2 车牌识别工作原理
车牌识别(LPR)系统是以图像处理、模式识别等技术为基础的智能识别系统,通过摄像机所拍摄道路上行驶的车辆图像进行车牌号码的识别。
车辆检测:可采用埋地线圈检测、红外检测、雷达检测技术、视频检测等多种方式感知车辆的经过,并触发图像采集抓拍。
图像采集:通过高清摄像抓拍主机对通行车辆进行实时、不间断记录、采集。
预处理:噪声过滤、自动白平衡、自动曝光以及伽马校正、边缘增强、对比度调整等。
车牌定位:在经过图像预处理之后的灰度图像上进行行列扫描,确定车牌区域。
字符分割:在图像中定位出车牌区域后,通过灰度化、二值化等处理,精确定位字符区域,然后根据字符尺寸特征进行字符分割。
字符识别:对分割后的字符进行缩放、特征提取,与字符数据库模板中的标准字符表达形式进行匹配判别。
结果输出:将车牌识别的结果以文本格式输出。

图1
3 船舶车辆识别的难点
车牌识别的难度在于识别率,再完美的技术也达不到100%的识别率。具体实施中,受制于光线、车速、触发装置等诸多因素影响。船舶由于特殊性,客观条件受限制非常严重,要想实现高识别率具有更大的难度,主要体现在以下几个方面:
■3.1 光照强度
由于船舶停靠泊位的不确定性,极大的增加了成像清晰度的难度。可能白天、也可能夜间;可能顺光,也可能逆光;而且由于舱内舱外光照强度反差极大,对成像质量也会造成极大影响。
■3.2 触发装置
车牌识别系统有两种触发方式,一种是外设触发,另一种是视频触发。视频触发方式是指车牌识别系统采用动态运动目标序列图像分析处理技术,实时检测车道上车辆移动状况,发现车辆通过时捕捉车辆图像,识别车牌照,并进行后续处理。视频触发方式不需借助线圈、红外或其他硬件车辆检测器。该方法的优点是施工方便,不需要切割地面铺设线圈,也不需要安装车检器等零部件,但其缺点也十分显着,由于算法的极限,该方案的触发率与识别率较之外设触发都要低很多。外设触发工作方式是指采用线圈、红外或其他检测器检测车辆通过信号,车牌识别系统接受到车辆触发信号后,采集车辆图像,自动识别车牌,以及进行后续处理。该方法的优点是触发率高,性能稳定;缺点是需要切割地面铺设线圈,施工量大。也可以通过发放远距离非接触卡片(譬如蓝牙卡)来实现拍照触发,但由于卡片不属于一次性使用,需要来回收发循环使用,既加长了车辆驶入驶出的时间,也加大了工作人员的工作量。
由于船舶全船都是钢铁结构,敷设地感线圈根本无法感应车辆。船舶车辆进出舱口宽度只有十几米,长度更是只有不到2米,安装红外检测器也无法准确判断人员或者非机动车辆,误报率极高,也不适合在船舶上使用。
4 解决方案
■4.1 光照强度
由于中海客运滚装船会根据不同航班班期调整,在不同的时间段停泊在不同的泊位,对车牌抓拍识别造成非常大的困难。有时,可能在白天舱口正对阳光直射处,舱内舱外光线反差非常大;有时,又会在夜间,舱内灯光亮,舱外很暗,同时,车辆远光灯开启,对车牌识别也增加了一定的难度。根据分析,我们决定为车牌识别系统增加强光补光灯。在实地测试前,我们以为白天光照强度较大,可以不用补光;夜间光线较暗,应该增加光线补光。但实地测试后,才发现,白天舱内舱外光线反差极大,如果不进行补光,由于车辆的撤档,车牌一片漆黑模糊,根本无法准确识别出车牌;夜间由于舱内正常的灯光补光,舱外光线强度又非常低,反而不需要增加额外的补光,就能很清晰的成像。经过多次反复试验,我们最终采用下列方法,解决了光线强度影响成像质量的问题。
(1)增加补光灯
监控补光灯分为白光灯和红外灯两大类,红外灯比较隐蔽,不会干扰民区;白光灯能够还原彩色图像监控,画面对比度好,在车牌识别、高清监控领域应用广泛。我们采用LED监控白光补光灯,该灯使用IP67防水等级一体化散热外壳,304不锈钢紧固螺丝,完全可以满足船舶的使用要求。同时采用高显色性指数灯珠,更接近自然光,可以使被照物体产生漫反射,消除过亮或者过暗现象。
根据摄像机的镜头焦距选择合适光束角度,光束角度过小,则出现“手电筒效应”,光束角度过大,则出现光源浪费,补光距离短。原则上,镜头焦距越大,补光灯的光束角度就越小,反之亦然,具体可参照以下表格。

图2
(2)增加光线强度传感器
在舱口处增加光线强度传感器,采用对弱光也有较高灵敏度的硅兰光伏探测器作为传感器;根据船舶舱口,配合相对的量程,使用标准 1个单位的照度大约为1个烛光在1米距离的光亮度。设定光照强度为 300~400Lux(日出、日落)时触发;通过232/485网络输出开光量信号。当光照强度超过300Lux时,输出信号给PLC控制器,PLC控制器会控制监控补光灯开启;当光照强度低于300Lux时 ,停止输出信号给PLC控制器,PLC控制器会控制监控补光灯关闭。
经过光线强度传感器感应光线强度,并通过PLC控制器控制灯光开启或者关闭,在适当的情况下进行补光,很好的解决了光照强度变化对车牌抓拍成像的影响。
■4.2 触发装置
国内多数车牌识别系统有两种触发方式,一种是外设线圈触发,另一种是视频触发。但经过实地测试,这2种方式在船舶客观条件限制下,都无法做到很高的车牌识别率,不能满足中海客运滚装船的要求。单独的外设触发,会由于人员及其他非机动车辆的进出,造成大量的勿拍无效识别;单独的视频触发,又会因为各种原因漏拍,识别率过低。为此,经过多次试验,我们提出了第三种解决方案,就是外设+视频触发的方式。
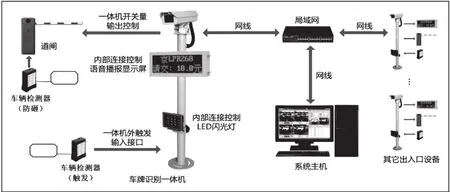
图3 国内常见车牌识别系统
由于船舶为全钢铁建造,地感线圈无法检测到车辆。开始我们采用了红外触发的方式。其工作原理为,在警戒区域内安装有发射和接收机,它们收发的结果就会在防范区域内形成了一个光束。发射机可向接收机发射出平行的不可见光束,接收机在接收到激光信号后就与发射机形成了一个完整的光通路,当有入侵者入侵时,就会阻断光通路内的接收,从而实现终端触发信号。
我们在船舶滚装车辆入口,增加了一对红外对射作为触发装置。但是测试后发现,该装置虽然能很好的触发,但是人员和其他非机动的车辆的进出都会遮挡到红外线的收发、造成大量的误触发,导致抓拍识别过多,系统会认为有很多无牌车辆。
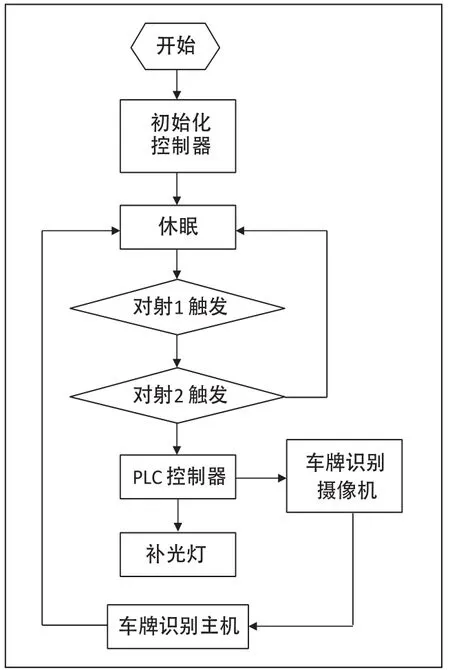
图4 车牌触发抓拍流程图
然后,我们采用了一前一后2对红外对射,并通过对PLC可编程控制器进行编程,大大减少了误拍。我们设定靠近船舱车辆入口外侧的一对红外对射为1号对射,靠近船舱车辆入口内侧的另一对红外对射为2号对射,1号对射与2号对射之间的距离大约为80cm。当1号对射触发并保持时,2号对射也被触发,此时PLC可编程控制器才输出触发信号给监控补光灯及监控抓拍摄像机,监控抓拍摄像机视频触发启动,开始识别车牌。这样,当长度小于80cm的物体(人员和自行车灯)通过舱门时,都不会触发车牌识别系统。同时,通过对PLC可编程控制器编程,保证了1号对射和2号对射的触发顺序,有效过滤了驶出舱门的车辆。通过这套装置,有效增加了机动车的识别率,大量减少了误触发。
然而,试运行一段时间后,确发现由于舱门宽度只有不到10米,红外对射漫反射过大,1号2号红外对射的发射端红外信号,都可以同时被1号2号红外对射接收端接收,造成无法准确识别车辆进入或驶出。通过查询资料,我们又改用了工业机床常用的激光对射取代红外对射,作为前端触发装置。
激光入侵探测系统与同类主动探测系统相比,对恶劣气候环境的适应性显着增强。激光束发射的功率密度大,发散角小,光束集中,方向性好,使用同等功率器件的条件下,在百米处,目标接接收激光束的功率密度是红外发光二极管光束的数倍,因而穿透雨、雪、雾、风沙能力强,极大降低了误报率。
激光报警系统自身抗电磁干扰性强,并对警戒激光束传播通路以外的区域、设备无任何电磁干扰。由于激光发散角小,光束集中,光束只在闭路中传输,当用多组激光探测器在直线方向接续传输或小转折角传输时,均无红外线探测器所产生的相互串扰现象,从而消除此时红外线探测器产生的漏报警。对周围环境无任何光散射、污染。

图5
1号2号红外对射接收端同时接收发射信号的问题被很好的解决了。但是,试用一段时间以后,又发现由于船体震动,激光的对射的精度过高,很容易发射端和接收端发生偏移,导致无法正常触发。最终,我们选用漫反射激光对射,既避免了1个发射源被2个接收源同时接收的问题,也同时避免了精度过高导致的系统故障。
通过以上措施,我们很好的实现了中海客运滚装船舶车辆车牌自动抓拍识别的问题,改系统已运行1年以上,稳定可靠,识别率可达到95%。为中远海运客运加强内部管理和外部安全提供了良好的保障。



