孙琎烨,兰英,陈信在,逄喜斌
(解放军91411部队,辽宁大连,116041)
0 引言
船用导航雷达是保障舰艇航行,探测周围目标位置,以实施航行避让、自身定位等用途的雷达[1]。随着雷达技术的飞速发展,雷达信号环境已经变得十分复杂,在试验和检修过程中,已经不可能布置大量真实的电子设备所需要的电磁场环境。因此,应用雷达信号仿真技术为导航雷达提供视频和中频信号,对评估雷达设备性能和日常维护检修,具有非常重要的现实意义。本文设计了一种应用微控制器和直接数字合成技术的雷达回波模拟系统,实现雷达回波信号的实时仿真,能够全面、快速、准确地检测雷达的技术指标,丰富装备维修测试手段。
1 系统要求及设计
根据对某型导航雷达控制关系和技术指标统计分析,系统产生和采集的信号包括:舰艏标、方位脉冲、触发信号、视频和中频脉冲。作为雷达回波模拟系统,不需要真实地向空间辐射电磁脉冲,因此系统捕获触发信号,并同步产生模拟回波。
系统采用Cortex-M4内核的微控制器[2]作为主控器件,包含主控模块、DDS模块、信号匹配网络、数据存储模块和人机交互等。系统上电后初始化片上外设,根据目标参数解算数据并缓存至数据缓冲区,应用定时中断产生舰艏标和方位脉冲激励待测雷达工作。同时微控制器捕获触发信号,并应用DMA传输和直接数字合成技术,实现视频和中频脉冲输出,系统原理框图如图1所示。
2 系统硬件设计
2.1 主控模块设计
根据系统设计指标要求,选用意法半导体公司推出的STM32F429作为主控芯片。该芯片通过复位和时钟控制器(RCC)可实现最高为180MHz的系统时钟频率,片内集成1MB高速Flash和256KB静态RAM,14个16位/32位定时器,具有SPI、SAI、I2S、I2C、USART和SDIO等多种串行通信接口方式,同时集成独立看门狗、窗口看门狗和低功耗电源管理等功能[3、4],具有易于程序调试、开发周期短等优点,且可满足精度及实时性要求。
根据雷达回波模拟系统设计原理,定时器外设配置及控制过程如下:通用定时器TIM2配置为定时更新中断,在中断服务中产生舰艏标,即雷达帧起始信号,同时使能通用定时器TIM3;TIM3配置为输出比较模式,在雷达帧扫周期内产生360个方位脉冲,此信号用于激励雷达工控机产生触发信号,触发雷达发射机发射电磁脉冲;由前所述,系统需捕获触发信号,并产生模拟回波视频,为保证信号实时传输,高级定时器TIM8_CH2配置为输入捕获模式,并配置从模式为复位模式[3],TIM8_CH1配置为输出比较模式,这样当TIM8_CH2捕获触发信号时,TIM8产生更新事件,并通过DMA传输方式更新寄存器值,在计时时钟的作用下TIM8_CH1通道输出视频信号VIDEO0。
2.2 DDS模块设计
直接数字合成是一种应用广泛的频率合成技术,传统的自激振荡产生正弦波的方式,在DDS面前正逐渐失去活力[5]。DDS技术具有频率分辨率高、频率切换速度快、频率切换时相位连续、可以输出宽带正交信号、输出相位噪声低、可产生任意波形及全数字化实现等优点。目前使用DDS技术可产生高达几百兆赫兹的频谱纯净、频率、相位和幅度都可程控的模拟正弦波。DDS芯片的核心是DDS核,由相位累加器和SIN/COS LUT(ROM)组成,其中相位累加器由N位加法器和N位累加寄存器级联构成,每来一个时钟信号,相位累加器的输出就增加一个步长K的相位增量,其大小由频率控制字决定。用相位累加器输出的数据作为SIN/COS LUT的相位取样地址,就可以把存储在SIN/COS LUT内的波形数据抽样出来,完成相位到幅值转换。
系统使用AD9959产生中频脉冲,该芯片是美国ADI公司最新推出的高速直接数字频率合成器,部分特性如下:32位频率分辨率;14位相位分辨率;10位输出幅度可缩放的分辨率;可实现最多16阶电平的频率、相位和幅度调制[6]。DDS模块外接25MHz晶振,通过时钟倍频锁相环可实现500MHz时钟频率,微控制器通过SPI串行外设接口向AD9959发送控制字,产生60MHz载频信号,应用2阶幅度调制将AD9959_P0引脚输入的视频VIDEO0调制成中频脉冲,再通过200MHz巴特沃兹低通滤波器滤波,将中频脉冲送至雷达接收机,完成回波中频脉冲模拟。
2.3 信号匹配网络设计
由于导航雷达与模拟系统间接口电平和阻抗标准不同,需要电平转换和阻抗匹配才能送入导航雷达或被模拟系统采集。信号匹配网络包含五种电平及阻抗匹配电路,实现基本原理相同。以视频信号匹配电路为例,电路工作原理如下:视频信号为负极性,因此匹配电路由两级PNP晶体管开关电路和OPA695集成运放跟随器电路组成,完成3.3V~0V到0V~2.9V的电平转换和阻抗匹配,设计电路如图2所示。

图2 视频信号匹配电路
当VIDEO0为高电平3.3V时,Q1截 止、Q2饱和,D1导通,将Q2集电极钳位到1.2V,调节VR1(分压比约为1:4)使U1同相端为0V;当VIDEO0为低电平0V时,Q1饱和、Q2截止,D1将Q2集电极稳压到-2.4V,经VR1分压,U1同相端电平约为-2.9V,实现电平转换;经OPA695集成运放构成带使能端的跟随器完成模拟系统与雷达工控机的阻抗匹配。
3 系统软件设计
系统的软件程序采用C语言和库函数开发方式编写,各程序模块相互独立,方便程序开发人员进行调试和移植[4]。系统软件程序主要包括:片上外设配置、参数解算和存储、DDS库函数及AD9959应用函数等程序模块,主程序流程如图3所示。

图3 主程序流程图
模拟系统由程序配置STM32F429片上外设功能,应用的片上外设包括:通用定时器、高级定时器、DMA、SPI和USART等,其中定时器配置是保证系统正常工作的主体部分,具体配置模式在2.1主控模块设计一节已有相关阐述,这里不再赘述。
3.1 数据存储结构
系统设置模拟回波目标方位分辨力0.12°、距离分辨力15m,因此雷达扫描一帧对应360/0.12 = 3000个数据单元。定义目标参数为Ap(方位位置)、As(方位大小)、Dp(距离位置)、Ds(距离大小),由于VIDEO0为负极性,根据公式1解算出目标视频缓存数据。

为保证数据传输的实时性,视频缓存数据以DMA数据流方式传输。系统配置DMA外设通道为DMA2_Stream3_CH7[3];配置TIM8定时器DMA接口为全传输模式,设置TIM_DMABase为TIM8_ARR寄存器地址、TIM_DMABurstLength为3Transfers。这样一次DMA突发传输可以连续更新TIM8的ARR、RCR和CCR1寄存器值[3]。STM32F429高级定时器ARR和CCR1是具有预装载功能的寄存器,具有相应的影子寄存器。当预装载寄存器值更新后,影子寄存器仍然保持原来的值,在更新事件发生之后影子寄存器才从预装载寄存器中获得更新,而定时器比较操作的是影子寄存器,这样可以避免程序运行时序混乱[3、4]。基于以上分析,系统将TIM8_CH2配置为上升沿下降沿输入捕获模式,设计视频数据存储结构如图4所示。

图4 数据存储结构
3.2 DDS模块程序设计
DDS模块程序包含DDS库函数和AD9959应用函数。通常生产商在推出DDS芯片时不提供相应的库函数,用户配置DDS工作模式需要查阅大量数据手册,并采用直接操作寄存器方法配置寄存器。本设计为方便用户二次开发,提高DDS芯片使用灵活性和程序可读性,针对AD9xxx系列直接数字合成器编写DDS库函数,同时将典型的DDS应用函数一并封装入库,方便使用人员移植和调用。DDS库函数的设计方法以幅度控制寄存器ACR为例说明如下:ACR寄存器为24位寄存器,包含6个位域[6],因此在DDS_ACRInitTypeDef结构体中定义6个相应位域的成员变量,每个成员变量可用功能组合逻辑在dds_driver.h文件中宏 定 义;DDS_ACRConfig(DDS_ACRInitTypeDef* DDS_ACRInitStruct)函数的入口参数为结构体指针,指向DDS_ACRInitTypeDef结构体,这样函数通过移位和逻辑运算操作各成员变量,将不同功能的组合逻辑写入到ACR寄存器相应位域,实现ACR寄存器配置操作。DDS库函数实现了人性化的寄存器配置操作,但用户还需要根据设计需求调用库函数实现相应模式输出。本设计提供单音、2/4/8/16阶FSK/PSK/ASK调制和线性扫描模式共6种AD9959应用函数, 用户只需调用应用函数并设置参数值即可实现相应工作模式和信号输出,如调用Level2Modulation_Config(u8 ochn, u8 type,double f0,double p0,double a0, double x1)函数,用户只需设置通道号、调制类型、频率、初相位、幅度值及通道字[6](即2阶调制参数),即可在相应通道输出2阶调制信号。
3.3 运动目标回波模拟设计
模拟运动目标采用上位机串口通信方式,并在数据存储模块中定义双缓冲区,使视频数据以雷达帧扫频率交替传输。此时,上位机程序需要在帧扫周期内完成视频数据传输及缓存,因此需确保波特率大于帧扫频率×288000,考虑到参数解算时间,系统选择USART2波特率128000bps,将DMA1配置为USART2外设到存储器传输模式,DMA2配置为存储器到TIM8外设传输模式[3]。实现过程如下:设当前DMA1目标地址指针P1指向BUFFER1首地址,DMA2源地址指针P2指向BUFFER2首地址,当HM信号到来时,此时交换指针P1、P2,使P1指向BUFFER2首地址、P2指向BUFFER1首地址,这样在帧扫周期内,TIM8从BUFFER1读视频数据,而上位机写视频数据到BUFFER2,实现运动目标回波模拟。
4 实验结果
系统设置单目标参数Ap=0.12°、As=1.2°、Dp=3000m、Ds=300m、TIM8计时频率为 3× 108/15 = 20MHz、中频载波频率60MHz,测试触发和中频脉冲如图5、6所示。
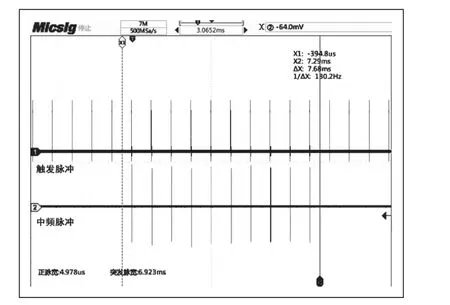
图5 触发—中频脉冲时序
可以看出,在触发脉冲作用下,模拟系统产生10个中频脉冲,覆盖方位范围为10×0.12°=1.2°,径向脉冲周期为21.04μs,径向脉冲宽度为1.05μs,均满足目标回波中频脉冲信号理论值及精度要求。
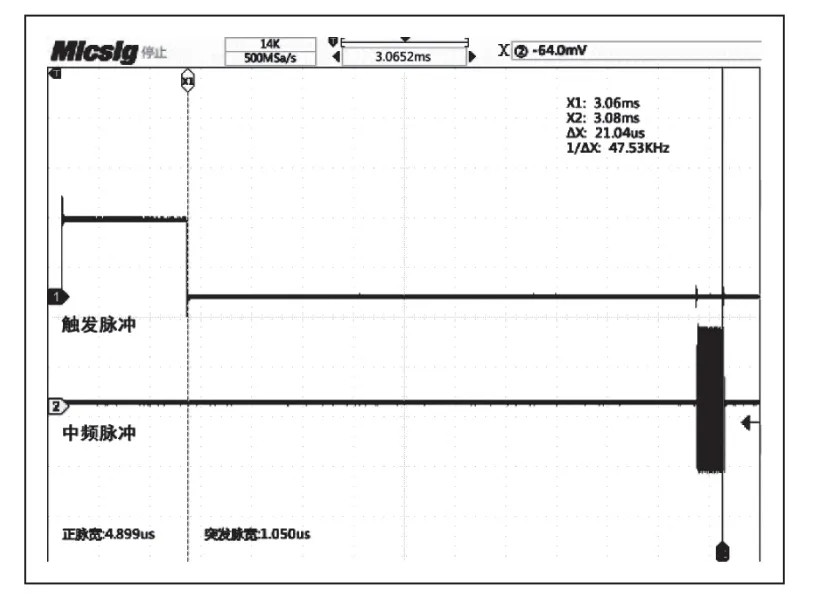
图6 触发—中频脉冲展宽
5 结束语
模拟系统和导航雷达系统构成一个闭环反馈系统,为了确保系统间同步运行和数据实时性,模拟系统数据处理速度、传输速度等指标要求较高。本文设计的回波模拟系统采用高速微控制器,通过优化配置定时器、DMA、串口等片上外设工作模式,并结合直接数字合成技术,实现了模拟系统与导航雷达之间的接口匹配,且具有体积小、便于携带、性价比高等优点。通过实验结果表明,模拟系统的可靠性、实时性和目标回波精度均满足设计指标要求。



