蒋小平,刘俊威,刘璇,崔恩铭,窦俊跃
(中国矿业大学(北京)电气工程及其自动化系,北京,100083)
0 引言
永磁同步电动机是一种新型的交流电机,因为稀土永磁材料得出现和价格的下降,以及电机自身具有的结构简单、效率高、体积小、转动惯量低和易于维护保养等特点,使其快速走进人们的视野。目前人们对于永磁同步电动机控制的研究主要可以包括增强驱动系统控制的鲁棒性、提高系统控制的精度以及提高系统的性价比。现代工业的快速发展使得传统工艺越越来越难以满足一些高精度工艺的生产需求,特别是单电机控制的生产工艺。因此,多电机协调控制已经成为永磁同步电机控制的一项非常关键的技术。
本文为提高多电机串联控制系统的同步控制精度,增强系统抗扰动能力,对传统偏差耦合控制作出改进,以滑模控制器代替传统的速度补偿器,减小了同步误差缩短调节时间,提高了系统的同步控制性能。其次为解决负载不均导致各台电机加速度不等的问题,引入对电机速度变化具有较强表现能力的加速度控制,设计了一种基于滑膜加速度控制器的转速同步补偿器,用于多台电机的给定速度跟踪控制,从而保证了整个串联控制系统的控制性能。
1 永磁同步电机数学模型
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的空间矢量模型[1]如图1所示。为简化分析,在建模及分析过程中作如下假设:忽略谐波效应,转子永磁磁场在气隙空间分部为正弦波,定子电枢绕组中感应电动势为正弦波;忽略定子铁芯饱和,认为磁路为线性,电感参数不变;不计铁芯磁滞和涡流损耗;不考虑频率和温度变化对电机参数的影响;转子上无阻尼绕组,永磁无阻尼作用。
在上述假设下,建立在d-q轴坐标下的PMSM的电压方程为:
式中,ud、uq分别为电机的d、q轴电压分量;R为电机的定子电阻;id、ia分别为电机的d、q轴电流分量;we为电机转子的电角速度;ψd、ψq分别为电机的d、q轴磁链分量。
磁链方程为:

式中,Ld、Lq分别为电机的d、q轴电感;ψf为电机的永磁体与定子交链磁链。
则PMSM的电磁转矩在d-q轴坐标下可表示为:

式中,Te为永磁同步电机的电磁转矩;p为电机的极对数。本文选用表贴式永磁同步电机,有Ld=Lq=L,所以转矩方程可简化为:

PMSM的运动方程为:

式中,TL为电机的负载转矩;J为电机的转动惯量;B为电机的摩擦系数。
2 多PMSM串联结构转速同步控制系统
多PMSM串联结构转速同步控制系统结构如图2所示。
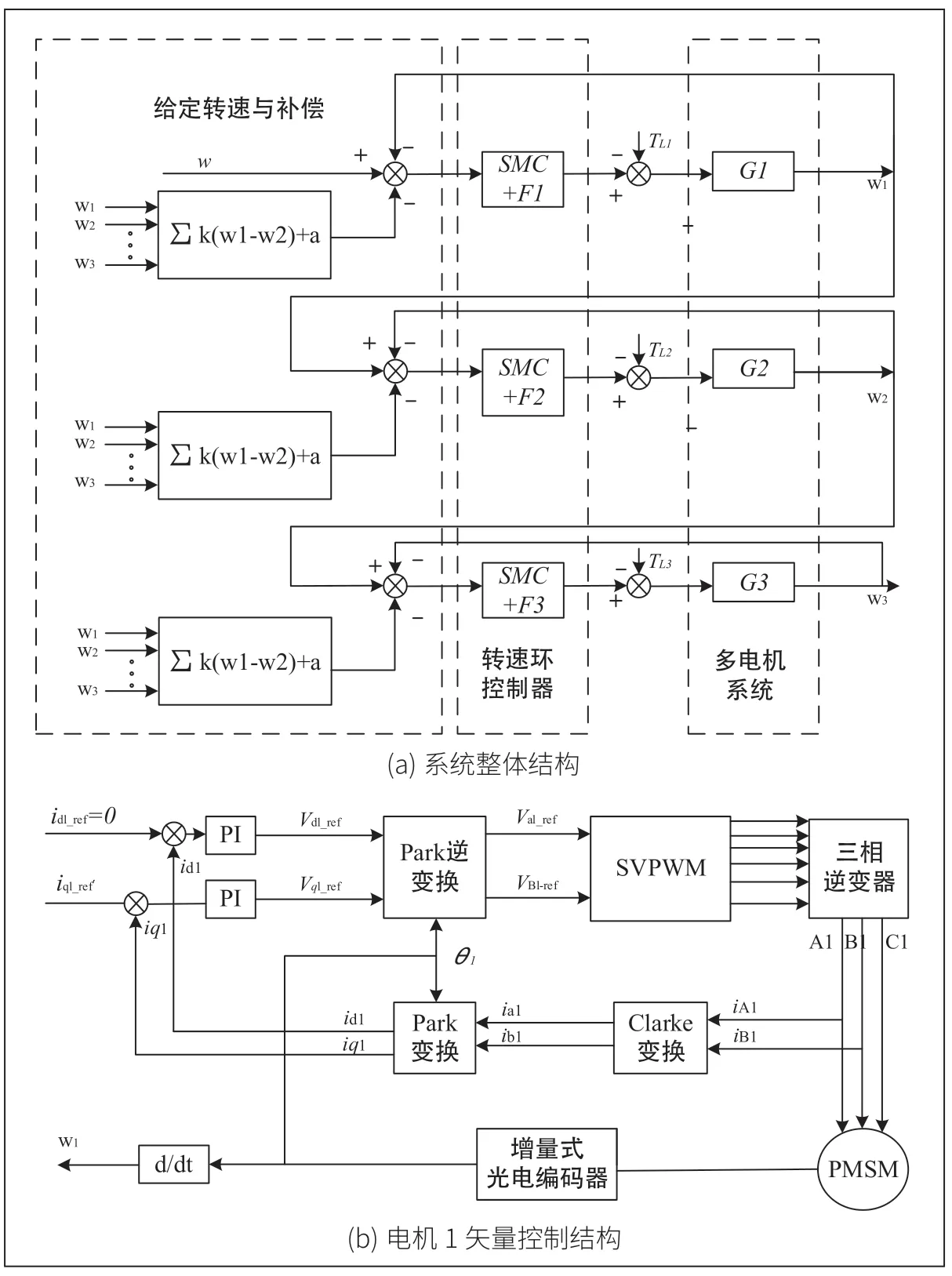
图2 3PMSM串联转速同步控制系统结构
系统中两台电机均采用转速、电流双闭环控制,其中电流环均采用id=0[2-3]的矢量控制方案,电机1的矢量控制结构如图2(b)所示。
图2中,w为给定的电机参考转速,ω1、ω2、ω3分别是电机1、2、3的实际转速,TL1、 TL2分别是电机1、2的负载转矩,a为最大加速度,iq为电机的滑模控制器输出电流。
与传统双PI并行控制系统相比,本系统采用滑模速度控制器代替传统的PI速度控制器来提高系统的跟踪性和扰动性能,同时基于偏差耦合控制思想和最大加速度概念,设计了转速同步控制器来提高系统的速度同步性能。
为了便于控制器的设计,以表贴式PMSM电机为例建立d-q坐标系下的数学模型为[4]:
其中Ls为定子电感。
采用id=0的控制方式,简化得:

定义PMSM系统的状态变量:
ωref为电机的参考转速,通常为一常量;ωm为实际转速。
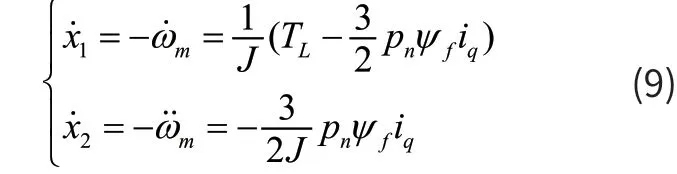

定义滑模面函数为:

其中:c>0位待设计参数。
对式(11)求导,可得:

为了保证三项PMSM驱动系统具有良好的动态品质,采用指数趋近律,可得控制器的表达式为:

从而可得q轴的参考电流为:

从式(14)可以看出,由于控制包含积分项,一方面可以削弱抖振现象,另一方面可以消除系统的稳态误差,提高系统控制品质。
根据滑模到达条件ss<0,容易验证在控制器(14)作用下,系统是渐进稳定的。
综上,设计的滑膜速度控制器如图3所示。
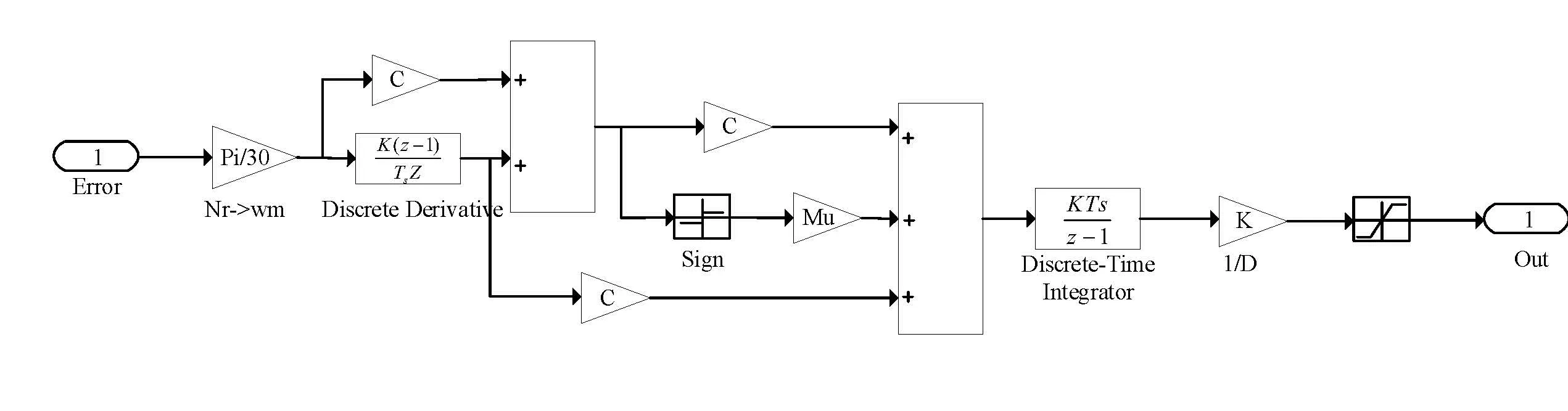
图3 滑模速度控制器仿真模型
3 仿真验证与结果分析
在simulink平台搭建仿真实验模型,仿真设置电机参数:极对数p=4,定子电感Ls=8.5mH, 定子电阻R=2.875Ω,磁链ψ=0.175Wb,转动惯量J=0.003Kg·m2,阻尼系数B=0.008N·m·s。仿真条件设置为:直流侧电压Udc=311V,PWM开关频率设置为fpwm=10kHz,采用周期设置为Ts=10us,采用变步长ode23tb算法,相对误差设置为0.0001,仿真时间设置为0.4s。为了验证所设计滑模加速度控制器的正确性,仿真条件设置为:参考转速Nref=1000r/min,初始时刻负载转矩TL=0N·m,在t=0.2s时负载转矩TL=10N·m,滑模控制器参数c=60,q=300,仿真结果如图4、5所示。
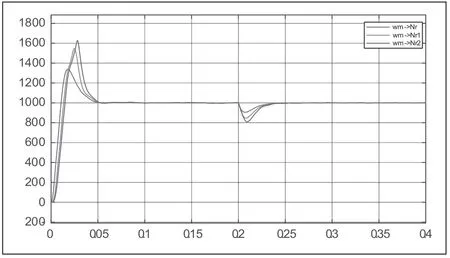
图4 传统偏差耦合串联系统转速曲线
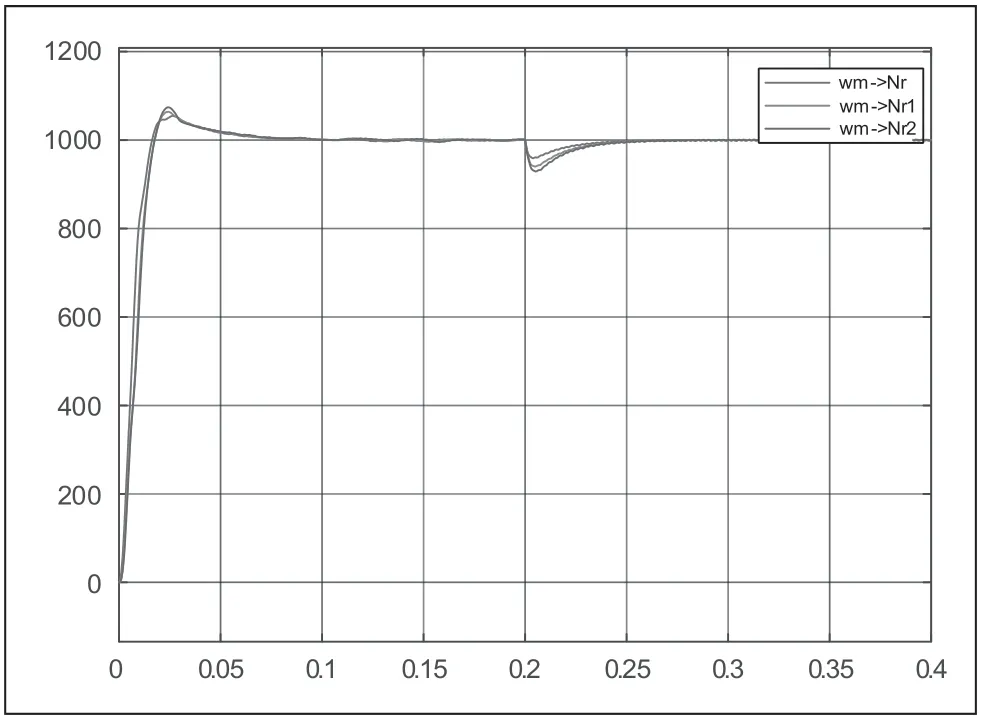
图5 改进偏差耦合串联系统转速曲线
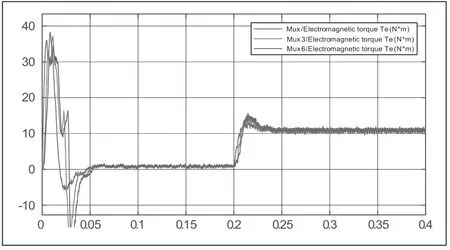
图6 传统偏差耦合串联系统输出转矩曲线
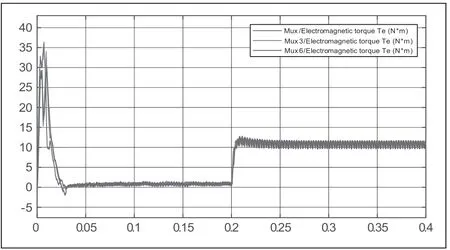
图7 改进偏差耦合串联系统输出转矩曲线
从以上仿真结果可以看出,当电机从零速上升到参考转速1000r/min时,与传统偏差耦合相比,虽然仍具有一定超调,但是三台电机的超调量均下降,同时跟随性能较好,有较快的动态响应速度,并且在t=0.2s时,突加负载转矩TL=10N·m,电机也能快速恢复到给定参考转速值,并且跟随性能较好。除此之外,对比输出转矩图形可知,改进偏差耦合3台电机的转矩输出相比传统偏差耦合,非常稳定,并没有出现较大震荡,从而说明所设计的滑模速度控制器具有较好的动态性能和抗扰动能力,能够满足实际电机控制性能的需要。
4 结论
本文针对多永磁同步电机串联系统中,由于负载扰动造成电机转速不同步而易引发差速震荡问题,提出一种基于加速度滑模速度控制器的速度同步补偿策略。与传统的双PI并行控制策略相比,本文所提控制策略在保证系统起动性能良好的基础上,有效降低稳态时系统受到不平衡负载扰动的速度同步误差,并且提高系统的鲁棒性和动态响应能力,改善了多电机跟随性能,降低了差速震荡风险。



