王旭,敬濯瑄,姚园园,岳净
(电子科技大学 成都学院智能制造工程系,四川成都,611731)
0 引言
随着社会的智能化程度越来越高,无线传感系统应用于设施农业的情况也越来越广泛。由于该系统能够适时监测农作物生长的环境(温度、湿度、光照度、二氧化碳等),并判断是否处于最佳生长环境中,从而进行参数的有效调控,达到优化农作物质量以及提升产量的目的。因此,该领域的研究具有良好的经济价值。
近年来,越来越多的高校和企业开展了设施农业的无线传感系统研究。例如:2019年,成都市农林科学院曹亮团队以物联网技术为基础,将大量传感器布置于设施农业中,构建了良好的环境监测体系[1];2020年,杨凌职业技术学院熊刚团队以STM32为主控系统,结合无线传感技术提升了监测系统的稳定性和监测精度[2];2021年,石河子大学徐梦颖团队采用群智能算法优化了无线传感系统的网络,降低了能耗[3]。从上述研究的情况来看,其侧重点不同,且均在一定程度上优化了设施农业无线传感系统的性能。但是,目前的无线传感系统主要是采取在温室大棚中多点布置静态传感器的方式来实现数据采集。通常情况下,温室大棚具有较大的尺寸,这就意味着静态传感器的数量需求巨大,且数据传输量也较高。不仅对网络传输造成的压力较大,且经济成本较高。因此,开发能够在温室大棚内部移动机器人,搭载少量传感器动态监测环境参数,不仅能够有效减轻网络负担,还可以极大地节约经济成本。
1 无线传感系统选择
温室大棚无线传感网络系统,是一种实现温室大棚内部环境参数信息的采集、传输、调整以及监控等功能的综合性系统[4]。在本课题中,通过三维建模、3D打印技术构建了一个长度为1m的温室大棚模型作为实验平台。通过分析Zigbee、NFC以及蓝牙三种无线传感通信技术的作用范围、传输速度等特点,蓝牙的通信范围为0~10m,传输速度为1Mbps[5],与该模型的尺寸匹配度较高,故本课题选择蓝牙通信作为无线传感系统的通信技术。
当选择蓝牙作为无线通信方式后,温室大棚模型的无线传感系统,主要通过搭载无线传感器的移动机器人在大棚中采集数据,并将数据反馈至手机APP进行人机交互,实现参数的监测与调整,系统的结构与框架如图1所示。
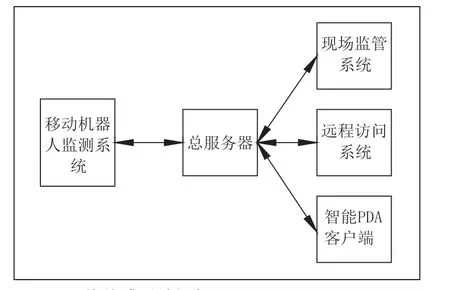
图1 无线传感系统框架
2 移动机器人设计
2.1 移动机器人监测系统运行原理
在温室大棚中,移动机器人监测系统的基本运行原理为:由机器人搭载温湿度传感器、光照传感器以及二氧化碳传感器等监测装置在温室大棚中按照既定路线运动。机器人在移动过程中动态监测环境数据,并将采集到的数据信息传送至控制端,由控制端(手机APP)根据获取的信息进行环境系统的判断和参数调整操作,监测与调节系统基本结构如图2所示。

图2 移动机器人监测与调节系统
2.2 温室大棚移动机器人设计
温室大棚移动机器人的设计,主要是采取功能与结构统一的设计原理[6]。即先拟定机器人的基本功能,然后根据功能确定其结构。在本课题中,移动机器人主要是通过快速移动,动态监测温室大棚内部的温湿度、光照度等参数。结合温室大棚的特点,拟采取轮式结构[7];同时,为使机器人的驱动系统实现无极调速,采用直流电机作为驱动系统;为适时调整机器人的运行路径、速度,机器人的主控系统选择为单片机;机器人运行时,通过手机蓝牙控制其路径、方向、速度。移动机器人的部分主要部件设计情况,如图3~6所示。
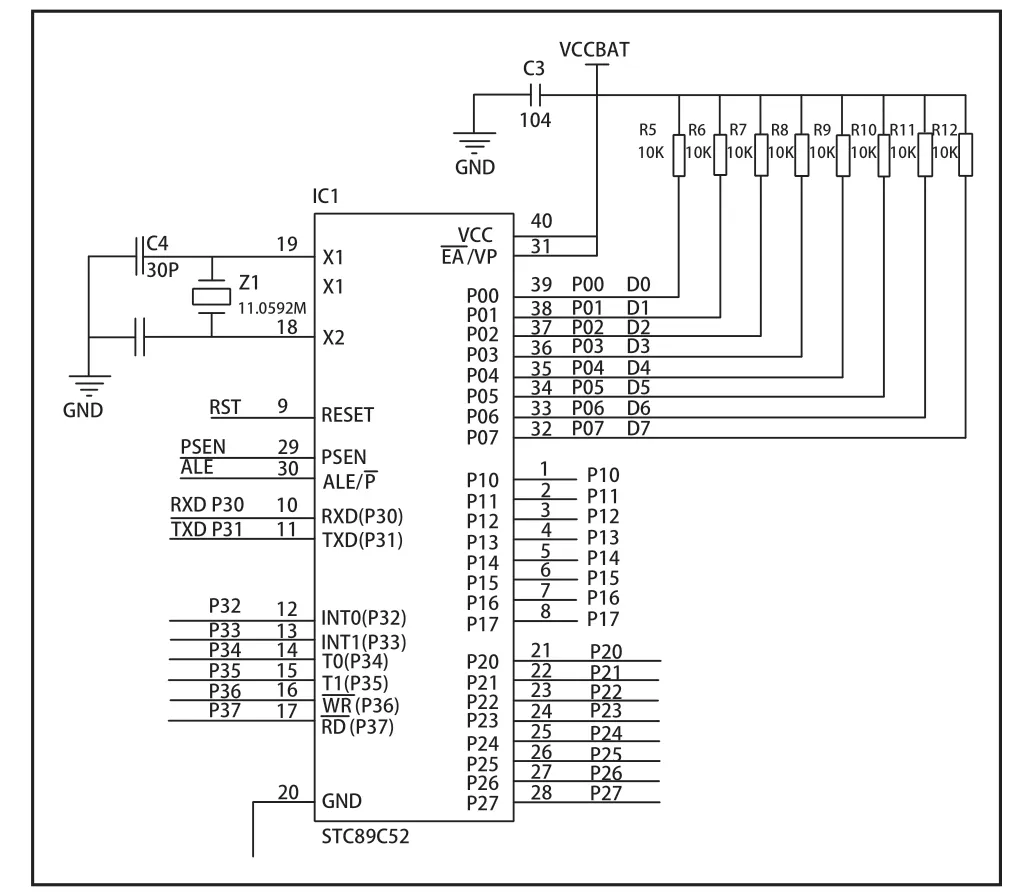
图3 移动机器人主控制系统

图4 移动机器人驱动系统

图5 电源
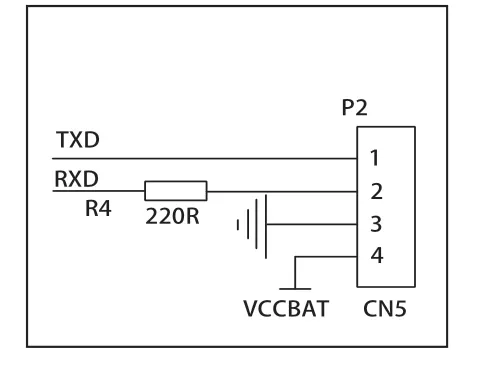
图6 蓝牙串口
3 实验测试
为验证温室大棚移动机器人监测系统的环境参数测试精度,本课题采取将移动机器人测试结果与传统的无线传感系统静态传感器的测试结果进行对比。测试的参数包括:温度、湿度、光照度。
3.1 路径规划
移动机器人的运行路径,主要根据温室大棚内部种植的农作物分布和土壤的情况来规划。在本课题的温室大棚模型中,规划了3种路径分别是:直线往复运动路径、S型路径、椭圆路径。
3.2 测试结果比较
为采集足够多的数据参数,此次实验测试周期为10天。测试步骤为:(1)移动机器人数据采集。编写程序让移动机器人分别按三种路径每天运行2小时,记录动态采集的环境参数;(2)静态数据采集。在温室大棚中按照传统的无线传感系统布置多个静态传感器,并与移动机器人同时测试环境参数;(3)数据统计。记录10天实验测试周期的全部数据,并进行比较,筛选测试精度最高的运行路径;(4)修正结果。根据移动机器人测试值与静态传感器测试值的平均偏差进行统计,并设定修正参数,提升检测的精度。限于篇幅,以湿度为例,第10天的测试数据如表1所示。
由表1可知,以静态传感器的测试结果为标准值。移动机器人在三种路径下测试的结果均与静态值存在偏差。其中,直线往复路径的测试结果偏差最小,10天的平均误差率在2%左右;而S型路径和椭圆路径的测试数据与标准值相比,偏差率较高,约5%。由此可知,直线往复运动的路径,测试结果准确度最佳,但仍需要进行修正,才能保持较高的精度。

表1 湿度测试数据比较
根据测试结果,温度、湿度、光照度修正值如表2所示。
由表2所示的温度、湿度以及光照度的实验测试结果修正数据来看,在温室大棚中,移动机器人可以根据农作物种植的情况,选择与之匹配的路径进行数据监测,并进行测试结果修正。最终,可以将精度的误差率控制在0.5%以内,达到一个比较高的精度标准。与传统的设施农业无线传感系统采用多个位置布置静态传感器相比,移动机器人搭载的传感器数量大为减少,在测试结果达到满意精度的同时,极大地节约了经济成本,实现了预期的目标。

表2 移动机器人测试结果修正
4 结论
以蓝牙无线通信技术为传输媒介,采用移动机器人搭载无线传感器的方式检测温室大棚中的农作物生长环境参数并进行适时调整。将移动机器人在不同路径下的测试结果与传统多点布置无线传感器的测试结果进行比较,虽然移动机器人在各路径下的测试结果均存在一定偏差,但由于偏差值基本稳定,因此可以通过对测试参数进行修正的形式,让移动机器人的测试结果达到一个较高的精度,节约了元器件材料,节省了经济成本。下一步,将对温室大棚参数调控系统及人机交互进行研发。



