王叶丰,柯磊
(攀枝花学院智能制造学院,四川攀枝花,617000)
0 引言
随着交通和物流行业的快速发展,全国重型货车保有量不断增加,每年全国发生的大型交通事故中重型货车的身影也越来越多,造成了大量的人员伤亡和经济损失。由于重型货车的特殊车身结构,造成了重型货车在右转过程中不可避免地会受到盲区和内轮差的影响,而司机在驾驶室内是很容易忽视车身周围的行人或其他车辆,从而发生交通事故,甚至造成人员死亡。车辆盲区检测报警装置是在车身上安装测距、角度等传感器,通过相应的算法预测车辆行驶轨迹并对障碍物进行识别后,用微型处理器做出危险状况判断并做出声光报警处理。
目前重型货车右转盲区检测报警装置有采用在车辆后视镜等位置安装一个或多个摄像头,当摄像头发现目标信息,就会通过声音或视觉信号提醒驾驶员;另一种是在车辆前后轮各安装一对超声波雷达,如果雷达检测到附近存在目标物,驾驶室内会进行声光报警提醒驾驶员注意避让障碍物;还有一种是从车辆上投射出灯光警示,多适用于夜间行驶环境,用闪光或红色光影警示行人或其他车辆,原理行驶中的重型货车。但是这些方式仅仅是通过单一摄像头或雷达来探测车辆附近小范围是否存在障碍物,很容易在有障碍物但不会与重型货车相撞的情况下产生误报警,准确率较低且需要长时间持续工作,大大增加了装置能耗。本文介绍的盲区检测报警装置采用条件式控制开关,通过角度传感器、测距传感器获取外界信息,利用微处理控制器的快速计算能力预测出车辆行驶轨迹并做出碰撞判断,最后进行声光报警提醒司机和行人或其他车辆注意相互避让。
1 车辆盲区分析
重型货车由于轴距长、车体宽等因素,在右转弯时,前内轮运动半径总是比后内轮运动半径长一些,所以前内轮运动半径与后内轮运动半径的差被称为内轮差。由于内轮差的存在随之带来的就是内轮差盲区。我国驾驶员的驾驶位位于左侧,导致重型货车在右转弯时,内轮差盲区进一步扩大。
2 装置总体设计
本文装置硬件由开关检测模块、转向角度检测模块、相对位置检测模块、控制模块以及报警模块组成。如图1 所示。

图1 装置硬件组成
开关检测模块用于实时检测车辆的转向灯的开关状态信息并将其发送至控制模块,转向角度检测模块用于检测车辆转向轮(一般为前轮)的转向角度信息并将其发送至控制模块,相对位置检测模块用于检测车辆与障碍物的相对位置信息并将其发送至控制模块,在应用了相应软件算法后,控制模块根据收到的开关状态信息判断车辆转向灯是否开启,若是,则控制打开转向角度检测模块和相对位置检测模块,并根据角度检测装置和相对位置检测模块发送的转向角度信息与相对位置信息判断车辆与障碍物发生碰撞的可能性,并在车辆与障碍物可能发生碰撞时,控制报警模块发出报警。
因为本文主要解决重型货车右转盲区问题,所以开关检测模块主要检测重型货车右转向灯的开关状态,转向角度检测模块采用汽车转向角传感器,设置于车辆的转向轴上可获取车辆转向角度信息,为算法提供计算数据。为了提高相对位置检测的准确性,本文采用两个24kHz 的毫米波雷达传感器分别安装在车辆的右侧车体上,实时检测车辆与障碍物的相对位置。控制模块采用STC89C52RC 单片机,对转向角度传感器和毫米波雷达传感器传送来的数据进行相应的计算。为了实现车内和车内同时报警,增强报警的直观性,车内报警器采用红黄绿三色LED 报警灯或者液晶显示屏,车外报警器采用红黄绿三色声光报警器。理想安装如图2所示。

图2 实物安装图
■2.1 开关检测模块
开关检测模块检测右转向灯的开启状态,当右转向灯开启时,开关检测模块把信息发送给控制模块,控制模块唤醒本装置。右转向灯的控制电路如图3 所示。

图3 右转向灯控制电路图
■2.2 转向角度检测模块
转向角度检测模块用于获取车辆转向角度信息,采用汽车转向角度传感器。其由发光二极管、光敏晶体管、开孔槽板等组成。当方向盘转动时,开孔槽板会跟随转动。光敏晶体管依据穿过开孔槽板的光线来动作,并且会输出数字脉冲信号。汽车电控单元会以此信号来辨认方向盘的转向角度、转动方向和转速等。
■2.3 相对位置检测模块
相对位置检测模块为一组两个24GHz FΜCW 雷达传感器。毫米波的波长介于厘米波和光波之间,兼有微波制导和光电制导的优点。且具有体积小、易集成和空间分辨率高的特点。与其他光学传感器相比对烟雾、灰尘等障碍物的穿透力更强,抗干扰能力更强,具有全天候全天时工作的特点。
FWCW 雷达传感器发射的信号为调频三角连续波。由于单频连续波雷达仅仅适用于测速,无法测距,故使用连续三角波信号的FWCW 雷达,FWCW 雷达既可以测距又可以测速,在近距离测量上的优势日益明显。当压控振荡器收到外界调制信号后,会控制毫米波雷达发出频率变化形如三角形的探测信号,如图4 所示。黑色实线为发射信号频率曲线,在没有多普勒频移的情况下即目标物体处于静止状态时,红色虚线为接收信号频率曲线,在有多普勒频移的情况下,蓝色点划线为接收信号频率曲线,扫频周期为Tm,扫频带宽为∆F,从发射信号到接收信号所用时长为∆t。
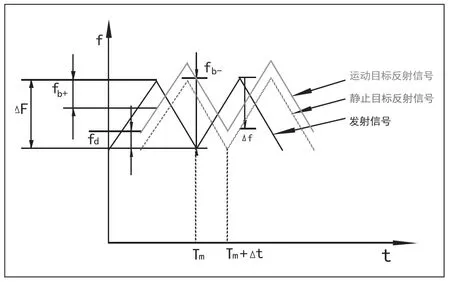
图4 FWCW 毫米波雷达测距原理
■2.4 控制模块
控制模块为微处理控制器,本文采用STC89C52单片机。STC89C52 单片机是一种低功耗、高性能CΜOS8 位微控制器,具有8K 字节系统可编程Flash 存储器,并且能够在非常恶劣的气候条件下长时间工作。
■2.5 报警模块
报警模块分为车内报警和车外报警。车内报警采用红黄绿三色LED 等或者LCD 显示屏。车外报警采用红黄绿三色声光报警器,声光报警电路分为闪光灯报警和蜂鸣器报警,闪光灯处于报警状态时,蜂鸣器报警才能发出一定音调的蜂鸣声,随着闪光灯闪烁蜂鸣器发出间歇声响。声光报警电路如图5 所示。
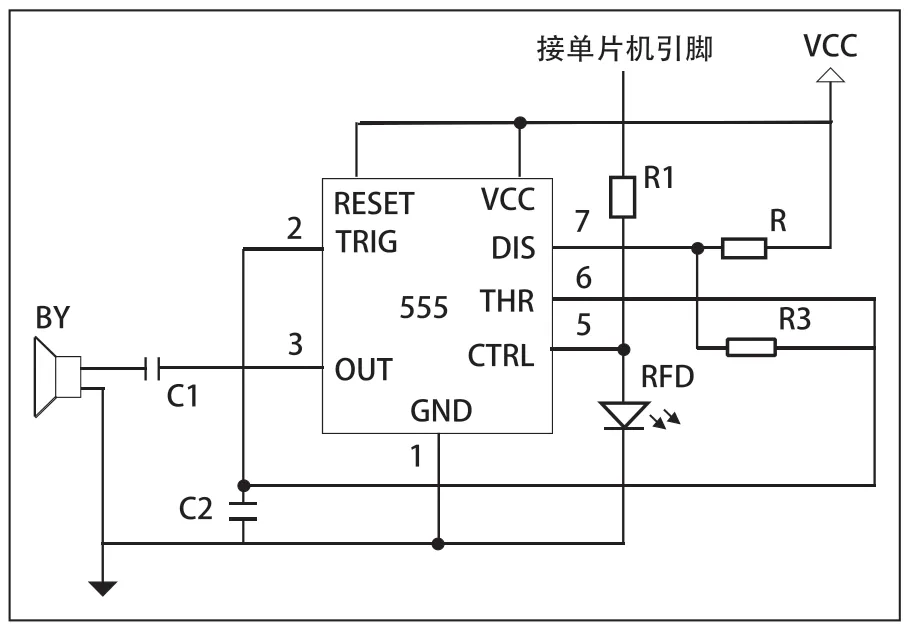
图5 声光报警电路
当控制模块判断为安全时,车内外报警器均显示绿色,不发出蜂鸣声,当控制模块判断为预警时,车内外报警器均显示黄色不断闪烁,蜂鸣声发声频率较为缓慢,当控制模块判断为危险时,车内外报警器均显示红色,闪烁频率加快,蜂鸣声发声频率也增加。
3 软件设计
本装置的开关检测模块将检测到的车辆右转向灯的开关信息发送给控制模块,控制模块控制装置开始工作,转向角度模块检测模块将检测到的车辆前轴转向角度信息发送给控制模块,相对位置检测模块将检测到的车辆与障碍物之间的距离信息发送给控制模块,控制模块根据相应的算法预测出车辆行驶轨迹,并与距离信息相对比,得出碰撞结论。控制模块根据碰撞结论控制报警模块做出相应报警处理。软件设计流程图如图6 所示。

图6 软件设计流程图
当车辆右转向灯被开启时,控制系统唤醒本装置。转向角度传感器检测车辆前内轮转向角度信息并发送给STC89C52 单片机,FWCW 毫米波雷达传感器检测车辆与目标的距离信息并发送给单片机。单片机接收到转向角度信息后根据相应算法预测出车辆运行轨迹,并将车辆与目标的距离信息相比较,得出碰撞可能性。李逸良曾在《车辆转弯时内轮差的运动学理论模型》的研究中提到过,行人和非机动车需要和转弯车辆保持至少车身长度的1/3 以上的距离。若判断为安全,则显示为无闪烁的绿灯,且无蜂鸣声;若为警告,则显示为低频率闪烁的黄灯,并伴有低频率的蜂鸣声;若为危险,则显示高频率闪烁的红灯,并发出急促的蜂鸣声。
4 算法模型
我们以非挂式重型货车为例,理想车辆模型如表1 所示。

表1 理想非挂式重型货车车辆模型
根据内轮差r=r1-r2 可得其数学模型如图7 所示。

图7 内轮差数学模型图
由上面内容可以得出:

将内轮差用转向角来表示,则为:

根据上式可知,当我们得到了转向角度和内轮差就能得到前内轮转弯半径和后内轮转弯半径。由于车辆转弯运动是一个半径不断改变的圆周运动,在知道前后内轮转弯半径后即可预测出车辆运动轨迹。
5 测试结果
选取五种不同规格的厢式卡车作为实验对象,由于现实生活中卡车前后轮间距有所不同,不宜作为理想实验对象,故将其理想化。实验车辆前后轮间距均采取后轮间距的数值。具体参数如表2 所示。当司机将方向盘向右打到极限位置,前外轮距离转向中心的距离通常称为最小转弯半径R,通过查阅资料可以得出,最小转弯半径R=车长L×2.4。根据上面的计算公式可以得出内轮差。数据分析如图8 所示。

图8 实验对象数据分析
由表2 可以看出当方向盘向右打到极限位置时,前内轮转弯半径r1 和内轮差r 都随着轴距L 的增大而增大,故可以得出,内轮差与车身长度呈正相关。

表2 理想实验对象具体参数
6 结束语
本文介绍了一种重型货车右转盲区监测报警装置,当车辆右转向灯打开时,STC89C52 单片机唤醒装置,转向角度传感器检测车辆转向角度,安装在车身右侧的两个24GHz FWCW 毫米波雷达检测车辆与目标之间的距离。单片机根据转向角度预测出车辆的运动轨迹,并于车辆与目标之间的距离做比较,判断碰撞可能性,然后控制声光报警器进行报警提醒驾驶员以、行人及其他车辆提高警惕,远离重型货车,可以很大程度地减少因货车内轮差形成的盲区而导致的重大交通事故。



