罗诗敏,龙诺春
(广东白云学院 电气与信息工程学院,广东广州,510450)
0 引言
距离测量是经常要进行的事情,面临不能达到的复杂环境下,如遇到河流、水沟、树障、路障、房屋阻碍等,采用常规的工具测量距离不仅有困难,而且较大误差,存在精度不高的问题,甚至有时不能进行测量。如何解决复杂环境下的距离测量及高精度要求问题,有大量学者进行研究与设计。目前采用超声波、激光、毫米波雷达、摄像等技术的测距系统比较多。不同的测距技术,工作原理有区别。超声波和激光测距有相似之处,主要是利用波的传播速度与时间关系测量距离,但工作原理有所不同,测量技术方法不一样。摄像技术测距是通过成像原理计算出测量距离。
超声波测距的原理是利用超声波在介质中的传播速度为已知,测量声波在发射后遇到被测目标物体反射回来的时间,根据发射和接收的时间计算出发射点到被测目标的实际距离。现国内外学者研究出的超声波测距方法主要有飞行时间法、相位差检测法、多频测距法等。文献[1-5]采用超声波传感器进行设计,方法各不相同。超声波可以沿直线传播,方向性强,但测距误差较大,存在精度不高的问题。激光测距的原理是利用激光器射出的一束射线遇到被测目标物反射回来的时间,根据发射和接收的时间计算出发射点到目标的实际距离。邸志刚等[6]在文献中对激光测距的原理方法进行了分析,并对激光测距技术研究现状进行了介绍。杨慧敏等[7]在文献中提出了基于数据挖掘的高精度脉冲激光测距系统。激光测距范围较远,可达数十公里,但容易受到烟雾、灰尘、雨滴的干扰,计时精度要求高,成本相对较高,还需要注意对人体的危害。毫米波雷达穿透雾、烟、灰尘的能力强,不易受环境因素干扰,相对激光雷达成本低,且对人的伤害较小。因此,毫米波雷达得到广泛应用。毫米波雷达具有角分辨率高、频带宽等优点,可作为传感器应用到距离测量中。不少学者对毫米波雷达在测距方面进行了研究。徐晴等[8]提出了利用ARM 芯片为主控制器,以LFMCW 雷达采集信息通过傅里叶变换提取测量目标距离的方式进行测距。但该系统对信号的处理不全面,存在准确度不同的问题。
毫米波雷达技术和FMCW(Frequency-Modulated Continuous Wave,调频连续波)技术是两种在高精度雷达测距中使用的技术。其基本原理为发射波为高频连续波,其频率随时间按照三角波等规律变化。目前已有集成了FMCW 技术和毫米波雷达技术的传感器。因此,可利用FMCW 毫米波雷达传感器,以STM32 嵌入式芯片为主控器结合其他元器件组成一个系统,可以实现复杂环境下的高精度距离测量。
1 系统设计方案
■1.1 毫米波雷达测距系统组成
毫米波雷达测距系统主要由毫米波雷达、STM32 嵌入式微控制器、键盘电路、时钟电路、LCD 显示电路、WIFI模块组成,系统组成如图1 所示。STM32 微处理器对来自毫米波雷达传感器的信息进行处理,计算出的距离信息通过LCD 液晶显示器呈现出来,另外有关信息可通过WIFI 模块传送到云平台,再由云平台将信息发送到移动终端,如手机等,可通过移动终端读取相关信息,键盘电路可进行测距系统操作。
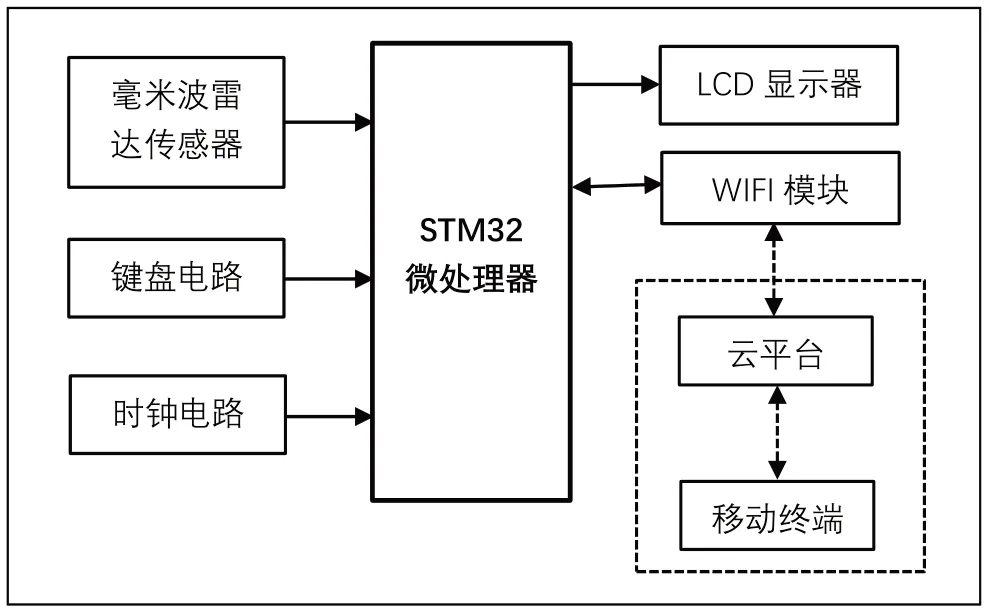
图1 毫米波雷达测距系统组成图
■1.2 功能模块的选择
1.2.1 STM32 微处理器的选择
STM32 微控制器是系统的主要器件,在满足功能要求的情况下主要考虑性价比,通过对目前市面上比较流行的几大主流单片机芯片对比分析,STM32F407ZGT6 芯片具多个串口,主时钟频率达到168MHz,系统设计宜选用此芯片为主控制器。
1.2.2 毫米波雷达传感器简介
毫米波雷达的优点是角分辨率高、频带宽,抗干扰能力强,且有利于采用脉冲压缩技术。FMCW 雷达传感器发射波为调频连续波,其频率随时间按照三角波等规律变化。雷达接收的回波的频率与发射的频率变化规律相同,都是三角波规律,只是有一个时间差,利用这个微小的时间差可计算出目标距离。目前主要有24GHz 毫米波雷达和60-80GHz毫米波雷达。24GHz 毫米波雷达主要应用在测距和交通领域的车辆测速,60G-80G 毫米波雷达主要应用在无人驾驶,汽车周围目标检测,人体生命探测等领域。市面上根据不同波段的毫米波雷达制作了各种类型的模块。有24GHz 毫米波雷达制作的模块,如HLK-LD116S-24G 24GHz 毫米波雷达传感器。Texas Instruments 公司的xWR1843 毫米波雷达传感器能够在76GHz 至81GHz 频带内工作,xWR1843 是一种独立的FMCW 雷达传感器芯片,并具有高达4GHz 的连续线性调频。有用xWR1843(IWR1843 和AWR1843)芯片开发的76GHz-81GHz 雷达模组,这些模组应用范围较广,AWR1843 可用于测距,但价格较贵。因此,综合考虑采用24GHz 毫米波雷达传感器。
2 系统硬件设计
■2.1 毫米波雷达传感器电路设计
系统硬件设计包括24GHz毫米波雷达传感器、LCD 显示模拟、WiFi 无线通信模块等功能器件与STM32 单片机的接口电路设计。现主要对毫米波雷达传感器电路设计。
毫米波雷达传感器基本组成包括发射端TX、接收端RX、混频器和混合器等。混频器生成一个Chirp 信号,再由发射端TX 的天线发送出去,当Chirp 信号遇到目标后,反射回来到接收端RX 天线上,RX 信号和TX 信号经混合器进行混合后得到中频信号IF。
西安鸿达中电测控设备有限公司提供的24G 毫米波测距雷达D303 模块可以用于测量短距离,D303 模块实物图及引脚接口图如图2 所示。模块采用串口通信方式,将串口接口电路引脚与STM32 微处理器的串口相连可正常工作,电路较简单。该模块可通过串口协议传送数据,发送测量的距离值。

图2 D303 模块实物图及引脚接口图
■2.2 WiFi 电路设计
WiFi 用于与云平台进行无线通信,采用ESP8266 WiFi功能模块进行设计,这个模块共有16 个接口。其中关键引脚有:REST 是复位功能,RXD 引脚接收信息、TXD 引脚用于发送信息。RT9193-33 电源转换器实现将5V 电源转换成3.3V 电源,GPIO15、GPIO0 引脚分别接电源地和3.3V。通过P1 接头与STM32 有关引脚相连接。具体电路设计如图3 所示。

图3 WiFi 模块接口电路图
3 系统软件设计
■3.1 主控程序设计方法
在系统运行时可能会出现外界的干扰,为了防止系统在遇到干扰时无法正常运行,系统在软件设计上加入了看门狗程序,保障系统运行不出差错,主程序流程图如图4 所示。STM32F4 微处理器的中断系统可配置16 个不同优先级别的中断,并且中断之间还可以嵌套中断。首先对STM32F4微处理器初始化,进行优先级分组,需要置两个响应优先级和两个抢断优先级。系统滴答计时器的初始化是为了做精准的延时而准备的,延时函数在每个模块基本上都有调用。最后对各个模块初始化,对STM32F4 最小系统I/O 口的参数以及模式进行配置,主要有串口的配置、ADC、TTL 串口、PWM 的功能配置。完成了初始化后,系统开始检测WiFi模块有没有成功连接路由器。在WiFi 成功连接之后开始接收数据,与设定数据进行比较,是否有要进行测距数据发送,并通过通信方式向移动终端或手机APP 或者 PC 端发送数据。如果要进行测距,系统显示屏将会红色提示,否则,显示屏将会是蓝色,表示正常。

图4 主程序流程图
■3.2 FMCW 毫米波雷达传感器测距算法
FMCW 雷达发射的是扫频信号(三角波或锯齿波),一个信号称为Chirp,一个Chirp 是正弦曲线,其频率随时间线性增加,幅度与时间的关系如图5 所示。通常采用频率和时间的关系图(f-t 图)来分析一个Chirp 信号,一个Chirp 的特征包含起始频率(fc),带宽(W)和持续时间(Tc)等,Chirp 的斜率定义了带宽上升的速率。在此设计中,设定线性调频脉冲在40μs 内扫描4GHz 的带宽,对应斜率S为100MHz/μs,如图6 所示。

图5 Chirp 信号A—t 图

图6 Chirp 信号f—t 图
信号以fc 的正弦波开始,然后频率不断增大,Chirp 信号的起始频率为fc,带宽为W,信号的持续时间为Tc,频率变化率为斜率,则斜率S 为:
混频器有两个输入一个输出,如果向混频器的两个输入端口输入两个正弦波,那幺混频器输出正弦波的瞬时频率等于两个输入正弦波的瞬时频率差值,输出正弦波的起始相位等于两个输入正弦波的起始相位差值。发射的Chirp 信号被物体反射后到接收端接收到信号的时间用t 来表示,设被测距离为d,光速用c 表示,则有:
接收信号与发射信号混频后的输出中频信号IF 频率恒定,假设IF 的频率为f,则有:
由上面公式可以得出被测量的距离d 与IF 信号频率f之间的关系式为:
因此,分析出频率f,就可以得到距离d。但这是相对静止情况下的测量方式,没有考虑多普勒频移,相对静止时没有频移。要注意的是雷达发射的信号能量向外发散,随着距离d 的增加,能量以平方量级的速度缩小。
D303-24G 型号的24GHz 毫米波测距雷达模块具有发射频率为24-24.25GHz,发射功率为5dBm,采用TTL 串口方式,串口通信波特率为115200,8 位数据位,1 位停止位,无校验位,固定查巡命令格式(HEX)为:55 5A 02 D3 84,模块接收成功后发送距离等数据,具体通信格式如表1、表2 所示。

表1 发送模块的上行数据

表2 接收模块的下行数据
说明:距离:占2 位,高位在前。状态:0:无人,1:有人。微动:0:无微动,1:有微动。雷达关闭:0:没有关闭,1:已关闭。校验:和校验。
说明:命令号:设置最大检测距离的命令号为:0XE5,固定字节。命令参数:设置最大检测距离,占2字节,高位在前。
对D303~24G 型号的24GHz 毫米波测距编程时应严格按此通信协议进行。
■3.3 WiFi 模块程序设计
在对WiFi 模块进行编程之前,先要对WiFi 模块进行固件库改写,在固件库改写成功之后才能进行编程,程序流程图如图7所示。图中的“喂狗”就是上一节提到的看门狗程序,协议处理可直接调用库函数实现。WiFi 设备通过配置入网,可由按键启动相应的连接模式,并对配置好的路由器进行连接。WiFi 设备与云服务器是双向通信,APP 端的操作信息通过云服务器发送到WiFi 设备,WiFi 设备接收完成后,微处理器(MCU)将会收到协议帧格式的数据,缓冲区将会储存数据。每隔一段时间都会进行一次抓包,然后将数据进行解析,解析后的数据能被MCU 识别从而发起事件处理。传感器采集的数据能够被MCU 储存,然后这些数据通过协议封装成数据帧发送到WiFi 设备,WiFi设备将数据输送至机智云端服务器,再传输到用户终端。

图7 WiFi 模块工作流程图
4 结语
毫米波雷达具有角分辨率高、频带宽、抗干扰能力强等优点,FMCW 毫米波雷达具有多普勒频移大等特点,已广泛应用于测距、定位、人体生命探测等各方面。项目研究了FMCW 毫米波雷达器的测距原理,并采用D303-24G 型号的24GHz 毫米波雷达设计了测距系统,经实验测试可进行距离的测量,实现了有关功能,该系统还可以进行移动物体的检测。但由于传感器和设计方面的原因,测量的距离只有3 米左右,误差为2cm,精度不高,有待进一步完善和优化。



