陈修忻,杨光
(上海地铁维护保障有限公司工务分公司,上海,200233)
0 引言
钢轨扣件是连接钢轨和轨枕使之形成轨排的部件,在保证轨道稳定性、可靠性方面起着重要作用[1]。钢轨扣件在轨道线路存在的状态可分为正常、断裂、缺失、移位四大类,我国长期以来对钢轨扣件状态检查主要还是以人工和静态检测为主。近年来,随着我国铁路与城市轨道交通的迅猛发展,信息化、智能化处置轨道线路故障是当前的一大趋势。
在钢轨扣件检测的研究领域,基于图像处理与机器视觉技术的检测方法不断提出,白堂博等[2]提出一种基于改进Faster R-CNN 的深度学习理论方法进行扣件定位;齐胜等[3]提出基于BEMD-IPSO-SVM 的检测算法对扣件完损状态进行检测;许贵阳等[4]提出基于K 均值聚类算法改进掩膜区域卷积神经网络(Mask R-CNN)实例分割算法中的区域建议网络方法对普速铁路有砟轨道2 个扣件数据集和高速铁路无砟轨道1 个扣件数据集上进行轨道扣件状态检测;Giben X 等[5]提出基于深度学习卷积神经网络的语义分割对扣件进行检测;以上方法对轨道扣件检测均能获得较高精度,但存在内存消耗大、检测速度慢的缺点,这难以实现快速、高效、高精度 的在线检测目标。针对这种情况,采用基于YOLOv5 算法的钢轨扣件检测方法,分析不同模型在不同参数下的检测效果,最终得到高效率、高精度的钢轨扣件检测算法模型。
1 YOLOv5 算法
■1.1 YOLOv5 算法模型
在YOLO 算法提出之前,目标检测主流算法框架为R-CNN 系列的two-stage 算法[6]。随着近几年目标检测算法的快速发展,以YOLO 系列为代表的one-stage 算法被提出,其核心要义是将目标检测定义为一个线性回归问题[7]。YOLO 算法是将单个卷积神经网络应用于整个图像,将图像分割成若干个网格并预测每个网格的类概率和边界框,以此实现目标检测速度快、精度高的目的。
YOLOv5 算法是在YOLOv4 的基础上改进而来,其最主要的区别在于对anchors 的处理机制,YOLOv5 作为YOLO 系列最新成员,其强大的目标检测算法以及轻量级的模型能够训练出快速而准确的权重文件。YOLOv5 模型沿用YOLOv3、YOLOv4 的整体布局,主要包含图像输入、Backbone、Neck、Head 四个部分[8],其网络结构如图1所示。

图1 YOLOv5网络结构图
■1.2 图像输入
YOLOv5 采用Mosaic 数据增强操作提升模型的网络精度与训练速度,同时提出一种自适应锚框计算与自适应图片缩放方法。
(1)Mosaic 数据增强
该操作是通过利用四张随机图像,对其进行随机缩放、裁剪、排布后进行拼接且每张图像都有自己对应的框,最后形成一张新的图像且该张图像又具有其对应的框,接着将该张新图像传入神经网络中学习,该方法极大丰富了被检物体的背景[9]。
(2)自适应锚框计算
针对不同数据集,均需设定特定长宽锚点框。在网络训练阶段,模型在初始锚点的基础上输出对应预测框,随后计算其与GT 框的差距并执行反向更新操作,进而更新整个网络参数,YOLOv5 算法可根据数据集的名称自适应计算出最佳锚框点[10]。
(3)自适应图片缩放
在传统目标检测算法中,不同图像其长宽不尽相同,因此,在检测前需将图像统一缩放到某一标准尺寸,这种方式可能造成大量的信息冗余进而影响整个算法检测速度。YOLOv5 算法提出一种能够自适应添加最少黑边到缩放图像的方法,这样可以极大提升算法检测速度。
■1.3 Backbone 网络
(1)Focus 模块
在YOLOv5 网络中,第一层即为Focus 模块,其主要目的是对图像进行切片操作,具体操作是在一张图像中每隔一个像素提取一个数值,最后一张图像形成互补的四张图像。相较于YOLOv3网络,Focus可以起到减少层数、参数量、计算量、cuda 内存占用的作用,同时在mAP 影响很小的情况下,提升推理速度和梯度反传速度。
(2)SPPF 结构
SPPF 结构是输入多个串行的5×5 大小的MaxPool 层,其结构图如图2 所示。

图2 SPPF 结构图
■1.4 Neck 网络
Neck 网络在YOLOv5 中主要用于生成特征金字塔,其目的是增强模型对不同缩放尺度对象的检测,以便能很好地实现识别不同大小、不同尺度的同一类物体。在YOLOv5 中,Neck 网络采用了FPN+PAN 结构。其中,FPN 通过融合高低层特征可很好的提升小目标检测效果,PAN 则在FPN 的基础上增加了一个自底向上方向的增强,进而提升大目标物体的检测效果。
■1.5 评价指标
目标检测首先考虑的就是目标识别效果的判别,本文采用测试精度P、召回率R、mAP@.5 和mAP@.5:.95作为评价钢轨扣件检测模型的性能。其中,P、R 分别指的是一个检测模型预测的正样本的确是正样本的概率与实际正样本的个数;AP 为P 对R的积分,而mAP@.5 是将IoU 阈值(IoU 表示检测框与真实标签的交集和并集的比值)设为0.5 时,计算每一类的所有图片的AP,然后所有类别求平均,mAP@.5:.95是不同IoU 阈值(从0.5 到0.95,步长0.05)上的平均mAP,mAP 主要用来评价检测模型的整体性能。
2 试验验证
■2.1 图像采集
本文钢轨扣件图像是由线阵相机现场采集而来,通过对某些扣件拆检以及安装部分断裂扣件等方式实现制作弹条缺失、弹条断裂、弹条移位和螺栓缺失四种状态扣件样本图片共计706 张(图片中弹条断裂120 处、弹条缺失234 处、弹条移位419 处、螺栓缺失79 处),将其按8:2 分为测试集图像和训练集图像。采集图像(部分截图)如图3 所示。

图3 现场采集扣件图
■2.2 图像训练及结果输出
将选好的706 张图像数据集中每个钢轨故障扣件进行分类标注最终生成一一对应的*.txt 的labels 文件,随后将其输入到 YOLOv5 网络中,经过算法的训练得到相应训练模型并最终将训练完成的模型输入到算法网络中对未知扣件进行预测分析,由此实现对故障扣件的检测,方法框架如图4 所示。

图4 方法框架
本文主要分析了YOLOv5s、YOLOv5m 两种模型下不同训练次数(epochs 取50、100 次做对比)对各类故障扣件的识别效果,具体情况如表1 所示。表1 显示:YOLOv5s模型下训练得到的钢轨故障扣件检测模型大小是YOLOv5m模型下训练得到的模型大小的三分之一左右;YOLOv5s、YOLOv5s 模型下训练钢轨故障扣件时,epochs 取100 时训练出的检测模型要优于epochs 取50 时的检测模型;由于螺栓缺失类别数量最少,在相同模型、相同参数下其训练出检测模型质量最差;YOLOv5m 模型下训练钢轨故障扣件时,epochs 取100 时各类别钢轨故障扣件识别精度P、召回率R 和mAP@.5 均超过到0.9 且所有类别故障扣件mAP@.5:.95 也达到0.822。

表1 不同参数下各类扣件状态识别效果
图5 所示为epochs 取100、YOLOv5m 模型下训练得到的钢轨故障扣件检测模型推理结果,图5(a)显示的是钢轨弹条缺失QS 与钢轨弹条移位YW,图5(b)显示的是钢轨弹条断裂DL,图5(c)显示的是钢轨螺栓缺失LSQS,图中显示的数值为在该检测模型下预测对应钢轨故障扣件类型的置信度大小,从数值可以看出,该模型对各类状态钢轨扣件具有很高的识别精度。

图5 预测结果
最后,将识别到的钢轨故障扣件截图分类保存至对应类别文件夹,结果如图6 所示。图6(a)为弹条断裂截图,图6(b)为弹条缺失截图,图6(c)为弹条移位截图,图6(d)为螺栓缺失截图。
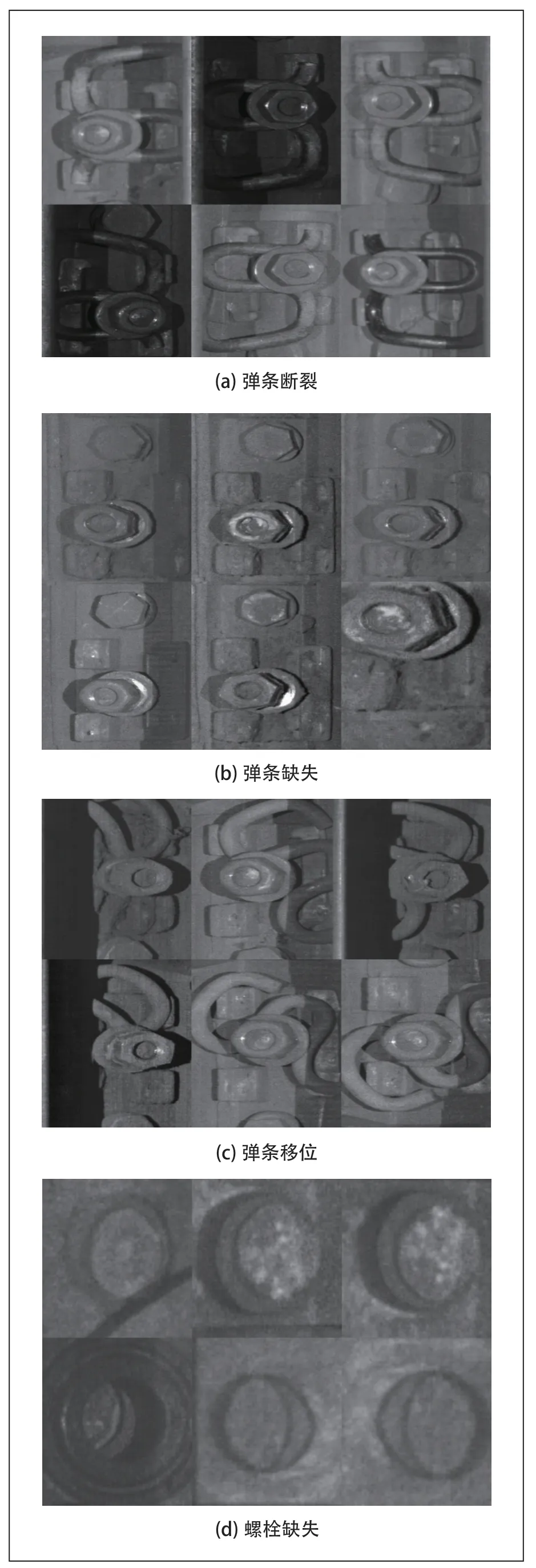
图6 故障扣件截图
3 结束语
本文采用YOLOv5 算法,分析了YOLOv5s、YOLOv5m两种模型对不同状态钢轨扣件样本训练50、100 次后的识别效果,结果显示:针对轻量级钢轨扣件图像集分类检测,采用YOLOv5m 模型、对全部样本训练100 次的YOLOv5算法对钢轨弹条断裂、缺失、移位、螺栓缺失四种状态扣件的识别精度P、召回率R、mAP@.5、mAP@.5:.95 分别为0.988、0.967、0.987、0.822,该方法对钢轨故障扣件分类检测具有很好的工程应用价值。



