曾军德,孙亮波,龚俊杰,梁会勇,郭成成
复杂管道清理机器人结构创新设计
曾军德,孙亮波*,龚俊杰,梁会勇,郭成成
(武汉轻工大学 机械工程学院,湖北 武汉 430048)
论述了管道机器人的研究现状,对几类典型管道机器人性能进行对比分析。创新设计了一款适用于清理中小型管道的清洁机器人。该装置由电机、履带行走机构、直径调节机构和清理机构组成。电缆传输信号控制机器人在管道内行走;通过直径调节机构调节机器人尺寸以适应不同管径变化。该机器人可两节串联使用以实现清洁力度的调节,配合气压杆装置调节刷头压力以增强清理效果,可适用于不同管径及污染程度的输水管道,具有良好的应用前景。
管道机器人;管道清理;履带式;直径调节机构
管道运输作为一种高效的流体运输手段,广泛应用于核工业、石油煤炭、社会民生的各方面[1]。由于管道的封闭特性,造成检测探伤、维修保养、清淤等工作十分麻烦。同时,需要经常清理的石油天然气输送管道、城市输水管道、工厂排污管道等管道内部环境差别较大,所需清洁方式也不同,进一步加重管道清理工作的顺利进行。
通过市场调研,目前市场上采用的清理方式(图1)及其性能分析如下[3-7]:
(1)该方法需要人工将钢绳穿过待清洗管路,钢绳固定在绞车上,在绞车的带动下来回运动,钢绳上固定的清理器材与钢绳同步,完成清淤工作。此种方法虽有机械辅助,但是依然需要人工去穿绳。且管道中释放出的气体会损害工人的身体健康。
(2)车载式高压水射流清淤。该方法利用高压水射流的强大冲击力冲击被清洗物体,将污垢剥离、清除,达到清洗的目的。然后将管道内壁残留的沉积物冲到下游检查井,再由吸泥车将其吸走。
(3)脚式管道清淤机器人。该机器人基本工作原理是通过腿推压管道壁来支撑身体,利用装有弹簧的倾斜支撑臂把腿上的车轮紧压在管道内壁上,使其产生预压力,利用软轴在扭矩作用下使机器人向前行走,进行清淤工作。

(a)绞车清淤 (b)车载式高压水射流清淤 (c)脚式管道清淤机器人
分析可知现有清淤机械主要存在以下问题:①操作繁琐,资源浪费严重;②不能适应多种直径的管道,通用性差;③清理机构不可调节清理压力大小,适应环境能力差。
1 管道清理机器人的设计思路
基于上述分析,创新设计一款针对中小直径(350~500 mm)、短距离工作(工作半径小于50 m)、可以中断输送(输送过程可以停止)的输水管道清理机器人,使其能够适用于一般的输水管道和工厂管道,以达到降低清理成本、适应一定范围管径、可调节清理力度的目的。该机器人创新设计流程如图2所示。
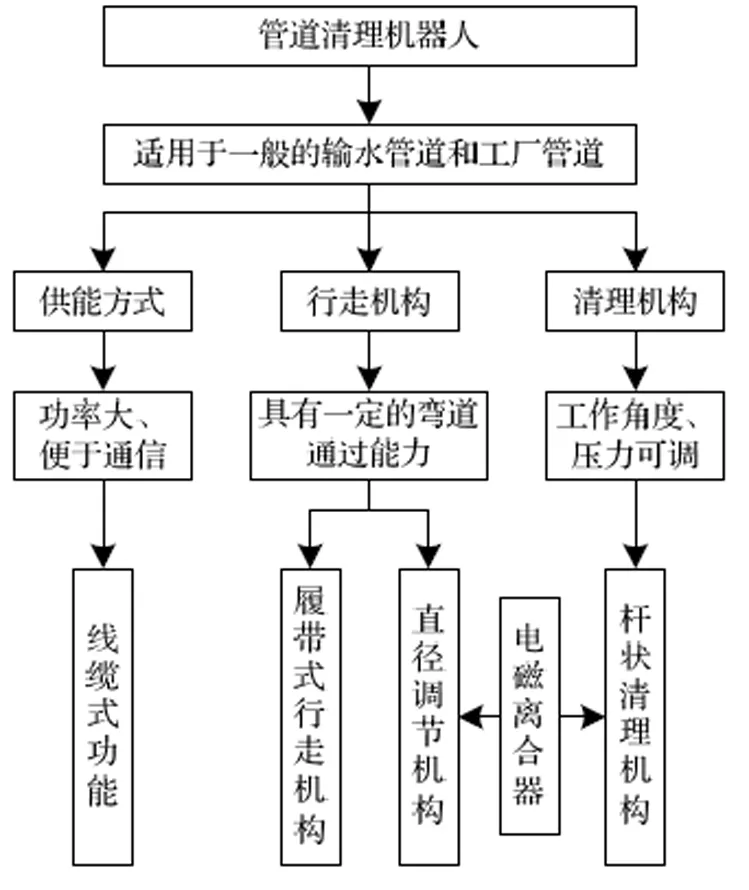
图2 管道清理机器人设计流程图
为了减少动力源数量、缩小机身尺寸,该机器人通过常闭式电磁离合器控制履带和清理机构、通过常开式电磁离合器控制直径调整机构。电机、履带、直径调整机构、清理机构四个部分同轴纵向布置,电机居中,动力通过中间轴、离合器、减速器等原件传至各个功能单位。总体布局示意图如图3所示。
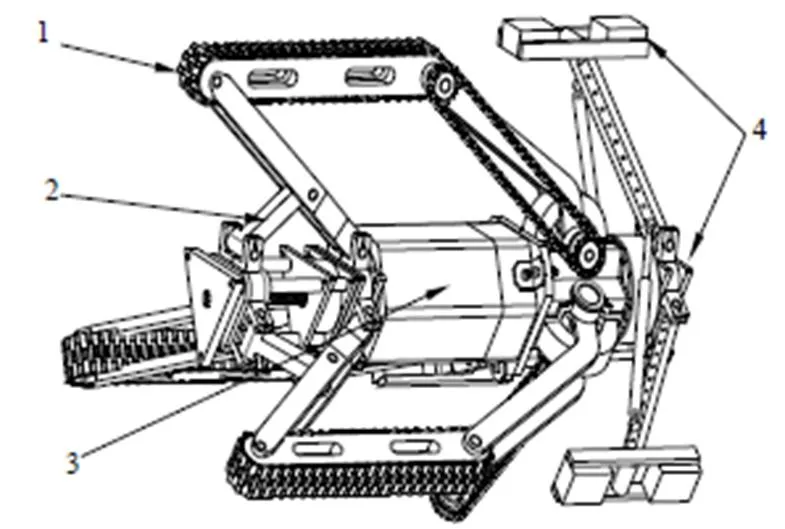
1.履带2.伞状直径调节机构3.电机4.清理机构
2 清淤机器人结构设计
2.1供能方式
现有的管道机器人主要有流体动能驱动式、自带能源式、线缆式等功能方式[5-7]。流体动能驱动能够从流动液体中获取能量,能行驶较远距离,但其功率较小,会增加管道阻力且不能在恶劣环境中使用。自带能源主要为电池,使用方便,成本低廉,适用于短距离、中等直径管道,但其体积较大。线缆式可实现大功率输出,工作较长时间,可避免在金属管道内部机器人通信屏蔽问题。
与其他方式相比,线缆式供能有功率大、工作时间长、易于通信等优点,能够符合短距离工作、便于缩小机器人结构尺寸等要求。故本设计采用线缆式供能方式。
2.2 行走部分
2.2.1 行走方式的选择
机器人的行走方式有轮式、腿足式、蠕动式、履带式等[8-11]。轮式移动速度快,结构紧凑但越障能力不强。腿足式和蠕动式都属于仿生机器人,能够做到较小的尺寸,但效率不高,控制复杂。履带式适应环境能力强,但纵向长度长、转弯性能差。
与其他行走方式相比,履带式能产生更大的摩擦力,拖缆行走能力强,在污染较为严重的管道环境中也有较强的通过能力。故本设计采用履带式行走机构。
2.2.2 行走机构的设计
若要限定机器人位于管道中心位置,至少需要三组履带。三组以上的履带可以增加行走机构在管道内壁的有效支撑,有利于提高机器人在管道内壁行走姿态的稳定性,增强机器人的驱动能力和牵引能力。但同时也增加了零件数量,使中心支撑部分强度降低。本设计中的机器人采用三组履带,分布如图3所示。
图4为一个履带单元。动力从电机向左输出至离合器和变速器,再传至丝杆,丝杆转动带动滑块运动。履带、前撑杆、后撑杆、电机共同组成四杆机构机构,支撑履带紧贴管壁。滑块的行程为55 mm,其左右滑动调节四杆机构角度,控制履带开合。调节完成后离合器断开,丝杆自锁,履带保持压紧。电机将动力传至离合器和减速器,工作时离合器保持常闭状态。动力通过减速器再传至蜗杆带动蜗轮经由链轮链条传送至履带。滑块部分结构如图5所示。滑块在导轨上滑动。电机将动力传送至丝杆,经由丝杆螺母传到弹簧。弹簧推动滑块向右运动。在丝杆螺母和滑块之间设置弹簧使伞状机构有一定弹性,防止由于管道内径轻微变化或杂物而卡死机器人。同时弹簧与滑块接触面设有压力传感器,在弹簧完全压紧后压力超过一定大小则反馈信息给控制系统,丝杆反转,释放压力。卡环固定在滑块上,限制丝杆螺母只能做横向微小的滑动,且不能滑出滑块。电机端装有编码器时时检测电机转速用于计算机器人行走速度,同时防止电机卡死烧毁。
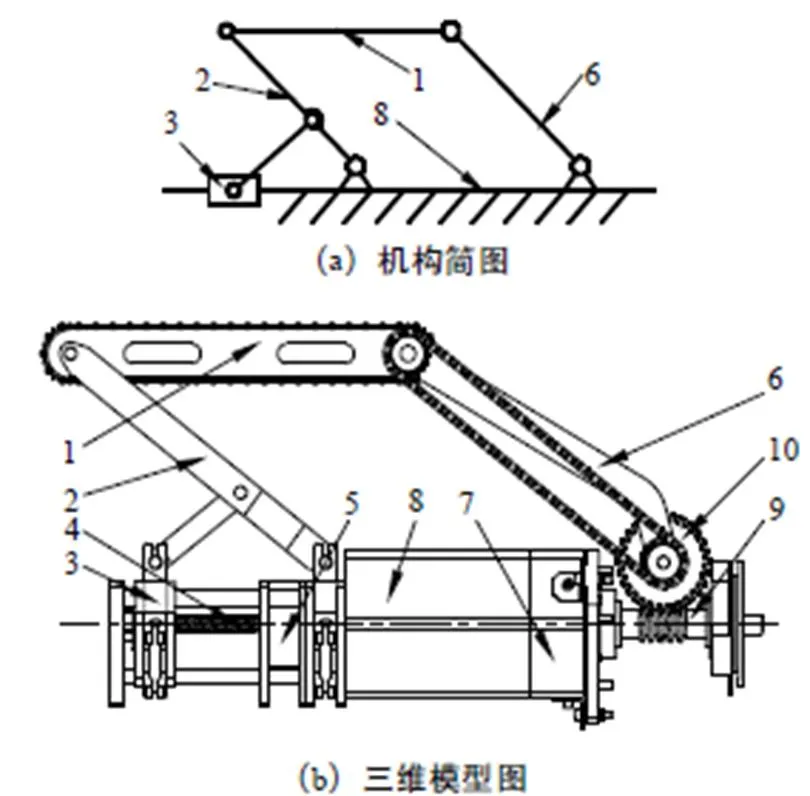
1.履带2.后撑杆3.滑块4.丝杆5.离合器和减速器6.前撑杆 7.离合器和减速器8.电机9.蜗杆10.涡轮
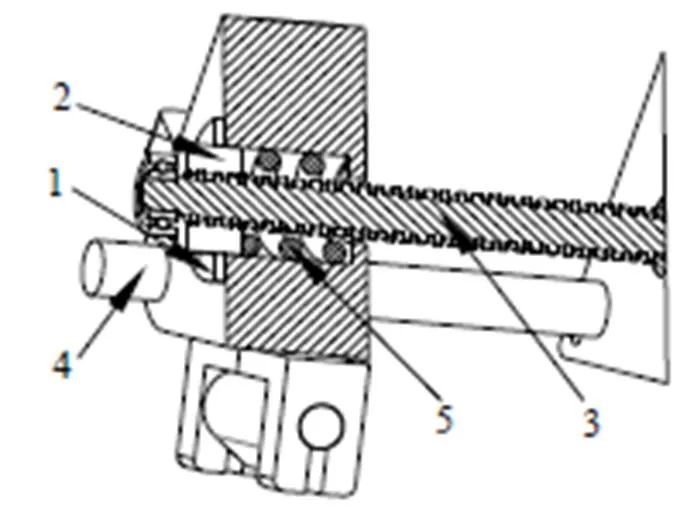
1.卡环2.丝杆螺母3.丝杆4.导轨5.弹簧
2.3 清理部分
输水管道内部的水垢以碳酸盐硅酸盐为主,硬度高,不易清除。实验表明,水垢可用刮刀、钢刷多次清除[8-9]。在机器人头部安装旋转清理机构,能提供并调节压力大小,且可根据不同的工作环境更换不同的清理装置。如图6所示,电机的动力经由蜗杆箱、离合器和减速器传递到机器人头端带动三根清理杆旋转。清理杆上带有可拆卸更换的刷头,可根据实际需要更换清理工具。离合器限定最大扭矩以保证刷头在遇到障碍物时及时停止旋转,保证机器人安全。
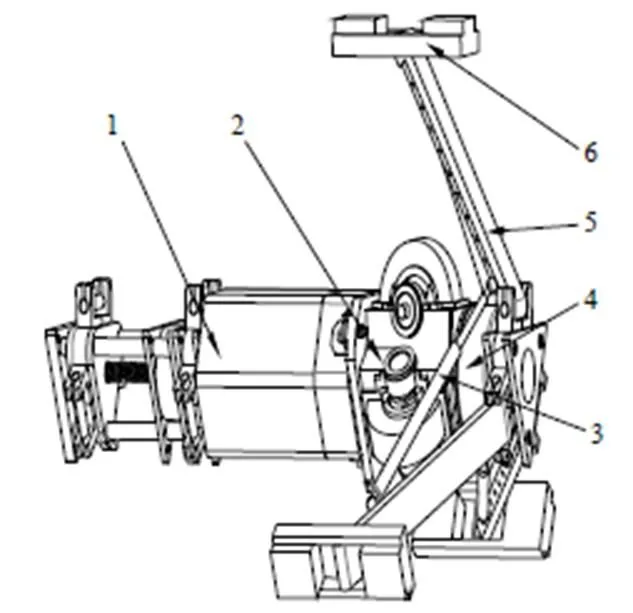
1.电机2.蜗杆箱3.气压杆4.离合器和减速器5.清理杆6.刷头
如图7所示,减速器的输出端带动清理机构旋转。清理杆与固定块铰链连接。三根气压杆将清理杆连接起来。由于气压杆的推力作用,清理杆将会一直保持向外张紧的状态,使钢刷始终保持一定压力。柔性连接三个清理头可分别独立运动,使其在管道内部凹凸不平,或在弯道处清理时,都能保持紧贴状态。清理杆上有双排螺孔,用来固定气压杆的位置,以获得适当的张紧力。
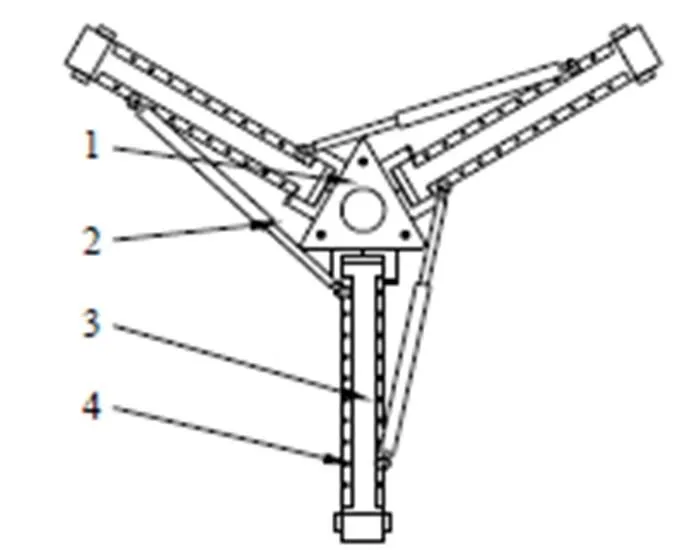
1.固定块 2.气压杆 3.清理杆 4.M4螺孔 5.清理头
因清理装置前端有蜗杆箱,在小直径(350 mm左右)工况将气压杆水平放置时,会与蜗杆箱发生干涉。此时需要将气压杆倾斜以消除干涉。推杆直径10 mm气弹簧推力能达70 kg[12],故倾斜气压杆造成的推力损失可以忽略。
3 小结
该管道清理机器人具有以下创新点:
(1)适用于中小直径(350~500 mm)、短距离工作(工作半径小于50 m)的管道清理;
(2)采用伞状开闭机构,调节履带的开合角度,增强机器人通用性,适应多种直径管道;
(3)采用气压杆装置调节刷头压力的大小,可根据污染程度调节清理压力。
[1]王殿军,李润平,黄光明.管道清理机器人的研究进展[J]. 机床与液压,2008,36(4):185-179.
[2]李茂英,李海燕. 城市排水管道中沉积物及其污染研究进展[J].给水排水,2008,34(SI):88-92.
[3]杨青梅,王立权,王知行. 一种新型排水管道机器人的研究[J].机床与液压,2006(3):125-127.
[4]王丰,董小蕾,蔡玉强,段润保. 中小直径排水管道缆控清淤机器人的研究[J]. 机械设计与制造,2008(4):161-163.
[5]任立敏,谭益松,殷国成. 具有柔性传动能力的气压驱动微型管道机器人[J]. 液压与气动,2016(8):18-23.
[6]许冯平,于淼,耿超,邓宗全. 排水管道清淤作业机器人结构方案创新设计[J]. 机械设计与制造:2011(6):326-326.
[7]陈金秀,沈乃勋,马培荪. 仿蚯蚓柔性蠕动管道机器人[J]. 机械设计与研究,2000(3):33-35.
[8]康伟. 大口径城市供水管道的清管器除垢实验[J]. 山西建筑,2016,42(20):114-116.
[9]张云伟. 煤气管道检测机器人系统及其运动控制技术研究[D]. 上海:上海交通大学,2007.
[10]范伟,吕军. 微型拦蓄冲洗系统在倒虹吸污水管道中的应用[J].给水排水:2014,40(2):109-111.
[11]李亮辉. 浅析工程机械用气弹簧的设计选型[J]. 工程机械,2013(6):37-39.
Cleaning Robot Design of Complex Pipeline Structure Innovation
ZENG Junde,SUN Liangbo,GONG Junjie,LIANG Huiyong,GUO Chengcheng
( School of Mechanical Engineering, Wuhan Polytechnic University, Wuhan 430048, China )
The research status of pipeline robot is discussed, and the performance of several typical pipeline robots is compared and analyzed The innovative design of a suitable small pipeline cleaning in cleaning robot. The device is composed of motor, crawler, diameter adjusting mechanism and a cleaning mechanism. The cable transmission signal, control robot in pipe robot; regulation the diameter size adjusting mechanism, adapt to different diameter change. The robot can be used in series two, adjust the clean strength, with the pressure rod device to adjust the brush head pressure, enhance the cleaning effect, suitable for water pipes of different diameters and the degree of pollution, it has a good application prospect.
pipeline robot;pipeline cleaning;caterpillar;diameter adjusting mechanism
TH11
A
10.3969/j.issn.1006-0316.2018.03.009
1006-0316 (2018) 03-0035-04
2017-10-31
曾军德(1995-),男,甘肃武威人,本科,主要研究方向为机械设计制造。
孙亮波(1979-),男,湖北天门人,博士,副教授,主要研究方向为机械设计及理论、机械创新设计。



