鲍敬源,毛冉成,孙辉艺
质量车运动过程的动力学及偏航性能分析
鲍敬源,毛冉成,孙辉艺
(1.海装武汉局驻武汉地区第二军事代表室,湖北 武汉 430064;2.西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
针对质量车的运动特性,基于多体动力学理论对质量车进行了动力学建模,载荷考虑了轮胎的非线性特性,对比分析了不同工况下的质量车动力学指标与偏航特性。结果表明,在运动过程中,质量车的垂向位移变化较小;纵向速度呈线性增加,纵向加速度与纵向载荷特性曲线相对应;前轮的垂向载荷显着大于后轮,左轮略大于右轮。此外,当质量车以相同末速度运行时,车体的最大横移量与最大点头角加速度随着质量车的配重增大而减小,而最大点头角速度趋势相反。本文研究成果能对质量车的设计及动力学分析提供一定的参考。
质量车;运动过程;动力学性能;偏航特性
近年来,我国航母技术取得快速发展,而航母之所以在海上战役中占据重要地位,是通过舰载机得以实现[1]。目前,舰载机在海上的升降方式主要是运动起飞,即运动装置向舰载机提供运动力,利用此力的作用,舰载机的速度不断增大,当飞机速度超过最小离舰起飞速度时,飞机离开甲板成功起飞[2]。质量车作为运动系统的主要组成部分,其在运动过程中的动力学性能与偏航性能至关重要。
朱齐丹等[3-4]建立了蒸汽运动器热力学模型和牵引释放装置数学模型,进行了理论分析与仿真验证,并与实验数据进行了对比,仿真结果表明:在蒸汽运动系统的3个阻力当中,质量车摩擦力影响最大,空气阻力影响最小;运动杆轴向力的峰值大于运动力的峰值。张晓谞等[5]建立了质量车挂索模型,并研究了基于质量车负载的阻拦动态特性,结果表明:增加航母航速、减小运动能量、下偏升降舵预置偏角和减小舰载机质量都可以降低运动杆与航母甲板发生碰撞的风险;当运动能量较低时,运动杆末端距离甲板的高度会出现震荡现象。吴昊[6]仿真研究了舰载机不同工况下运动起飞的过程,以及各种环境因素对舰载机运动起飞的影响。杨莹等[7]建立了舰载飞机-运动系统简耦多体动力学模型,考虑在舰面摇晃载荷、侧风载荷作用下,利用ADAMS动力学仿真软件对舰载机运动起飞进行刚柔耦合多体动力学仿真分析,获得运动起飞过程中飞机机体过载传递路径和应变分布。赵九峰[8]给出了12臂自控飞机回转机构各阻力的计算方法,并推导了对应的计算公式,借助ANSYS Workbench平台对回转机构进行了仿真计算与验证,结果表明在进行旋转类设备的设计与选型中,电机的确定及驱动形式尤为重要。李俊等[9]建立了轨道车辆上的质量车模型,通过现场试验分析了钢轨打磨质量车的动力学特性与打磨质量的影响。其研究结果表明,随着打磨速度的增加,打磨小车各主要结构的振动幅值降低,且打磨后的钢轨不平顺质量有所提高;在具有波磨的轨道上进行打磨作业时,打磨小车各主要结构的振动幅值均高于在无波磨的轨道上打磨的幅值;当波磨的通过频率与打磨电机的激振频率吻合时,对钢轨打磨小车的振动和打磨后的钢轨不平顺质量均不利。包文奕等[10]结合了多体动力学与刚柔耦合理论,建立了大型质量风力机的刚柔耦合动力学模型,并通过了有效性验证,凭借风洞试验分析了偏航特性对于结构风致相应的作用。研究表明,偏航角度为30°和120°时,将带来显着的负面影响,应当予以规避。
综上来看,以往不同领域的学者对质量车在运动过程中的动态特性与安全性分析,已经有了较多的研究。而针对不同载重的质量车在运动过程中的动力学及偏航性能分析,还不够充分。为此,本文基于多体动力学理论,考虑了质量车轮胎的非线性特性,进行了动力学建模,建立了精确的质量车模型,并通过仿真计算对比分析了不同工况下各质量车的动力学与偏航指标。
1 模型建立
质量车是一个多体系统,由车体、轮轴系统、配重以及车载设备舱等组成,不但有各部件之间的相互作用力和相对运动,而且还有轮胎与跑道之间的相互作用关系,因此,理论计算分析模型只能根据研究的主要目的和要求,对一些次要因素进行相应的假定或简化,而在对动力学性能影响较大的主要因素上尽可能做出符合实际情况的模拟。典型质量车的主要结构示意如图1所示。
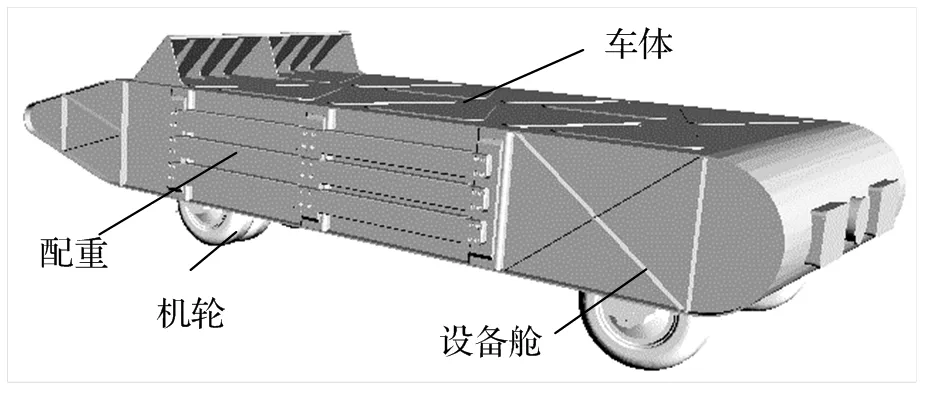
图1 质量车结构示意图
根据质量车方案对质量车甲板运行和空中飞行阶段的动力学进行仿真分析,采用多体动力学软件SIMPACK,首先建立质量车的多体动力学模型,设置运动力曲线和跑道长度,进行仿真分析,获得质量车运动位移、速度和加速度,车轮载荷和运动姿态等信息。
1.1 轮胎非线性特性
轮胎与地面的接触属于幅值的非线性过程,轮胎垂向刚度随着压力和负载的变化而变化。同时轮胎还具有纵向蠕滑特性,轮胎纵向力与纵向蠕滑率和轮胎垂向力密切相关[6]:
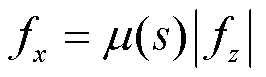
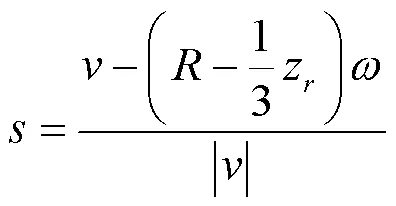
同时,考虑到轮胎的横向刚度会带来一定的阻尼效应,将对轮胎快速横向移动有一定的抑制和缓解,因此模型中忽略轮胎的横向特性,使得计算结果偏保守。
1.2 坐标系及动力学参数
为了更好地模拟质量车的运行性能,建模时考虑了将车辆横向运动和垂向运动耦合起来的数学模型。坐标系规定为:质量车的前进方向为轴;轴平行于轨道平面指向右方;轴垂直轨道平面向上,运行方向反向定义左右。根据设计要求,质量车的部分计算参数如表1所示。
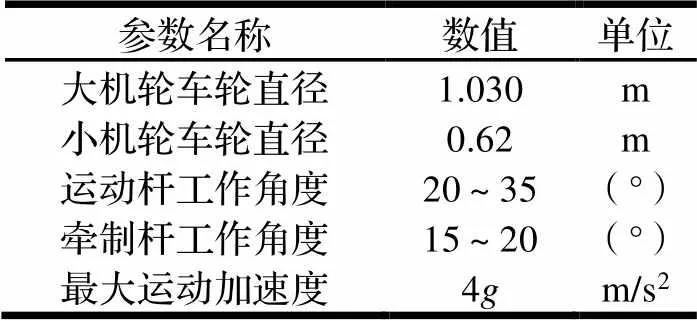
表1 质量车部分计算参数
1.3 动力学模型集成
通常,质量车按照其载重的等级可以分为四轮与六轮质量车,二者皆有车体与后轮的2个机轮。区别在于四轮质量车前轮有2个机轮,而六轮质量车的前轮则有4个机轮,典型的四轮质量车与六轮质量车分别如图2和图3所示。
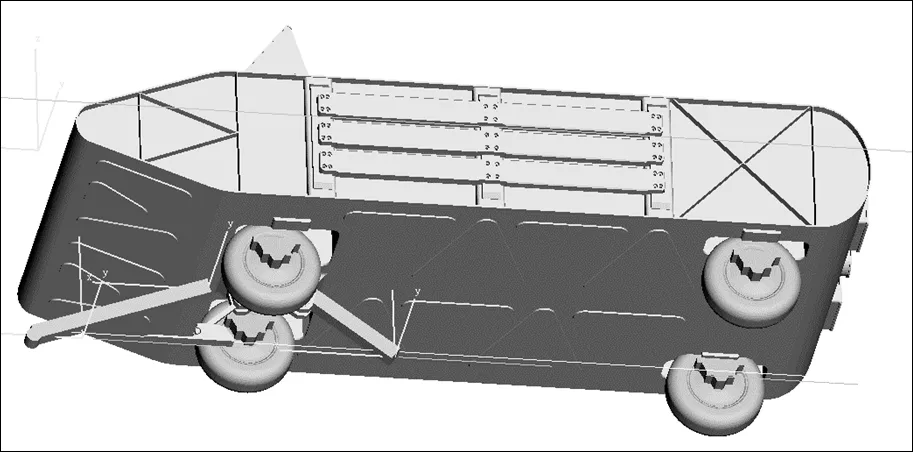
图2 四轮质量车模型
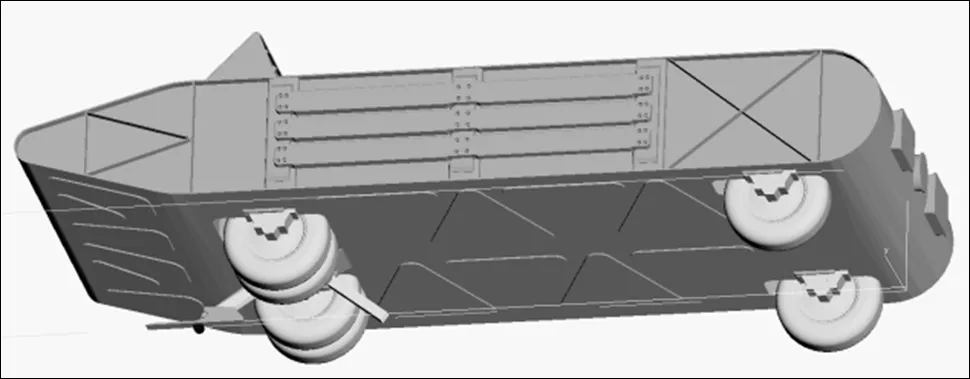
图3 六轮质量车模型
模型的自由度方面,4轮质量车模型由1个车体和4个机轮共5个体组成。6轮质量车模型由1个车体和6个机轮共7个体组成。车体6个自由度分别为纵向、横向、垂向、侧滚、点头、摇头。采用相对坐标系建模方法,机轮相对车体只有1个旋转自由度。从而四轮质量车与六轮质量车的总自由度如表2所示。
综上所述,机轮采用简单飞机机轮模型,轮胎垂向力考虑轮胎的非线性刚度特性;轮胎纵向力由其蠕滑关系和法向力决定。

表2 质量车模型自由度
2 动力学分析
基于前节建立的质量车多体动力学模型,分别考虑配重为8.5 t的四轮质量车与配重分别为25 t和30 t的六轮质量车,仿真计算其以不同的末速度完成运动行程的动力学性能指标。图4为8.5 t四轮质量车以末速度250 km/h完成运动过程给定的载荷特性曲线。不同重量的质量车对应的弹射力不同,需要达到的末速度也不同,因此需要在该曲线的基础上进行缩放。缩放原则是根据质量车的重量和要求的末速度调节幅值,保证质量车在跑道末端达到工况要求的末速度。
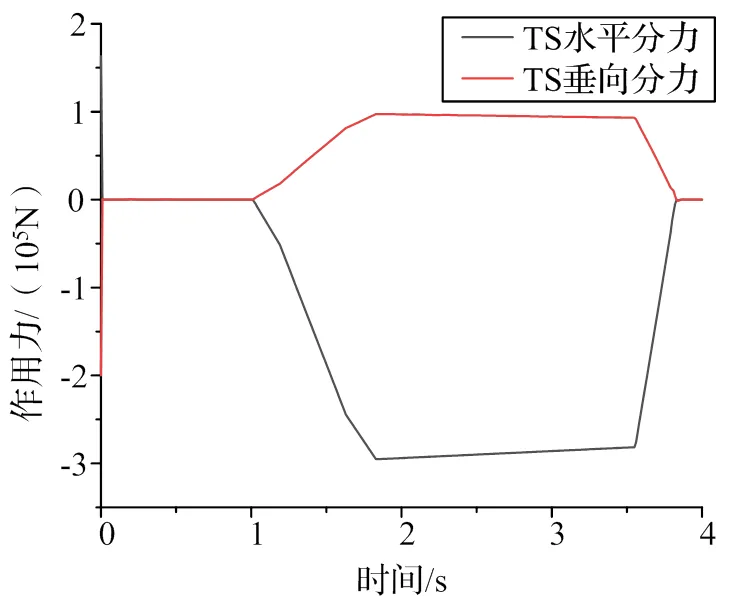
图4 四轮质量车载荷曲线
图5~8分别为质量车对应于载荷曲线过程的位移、速度、加速度与车轮垂向载荷的时间历程。
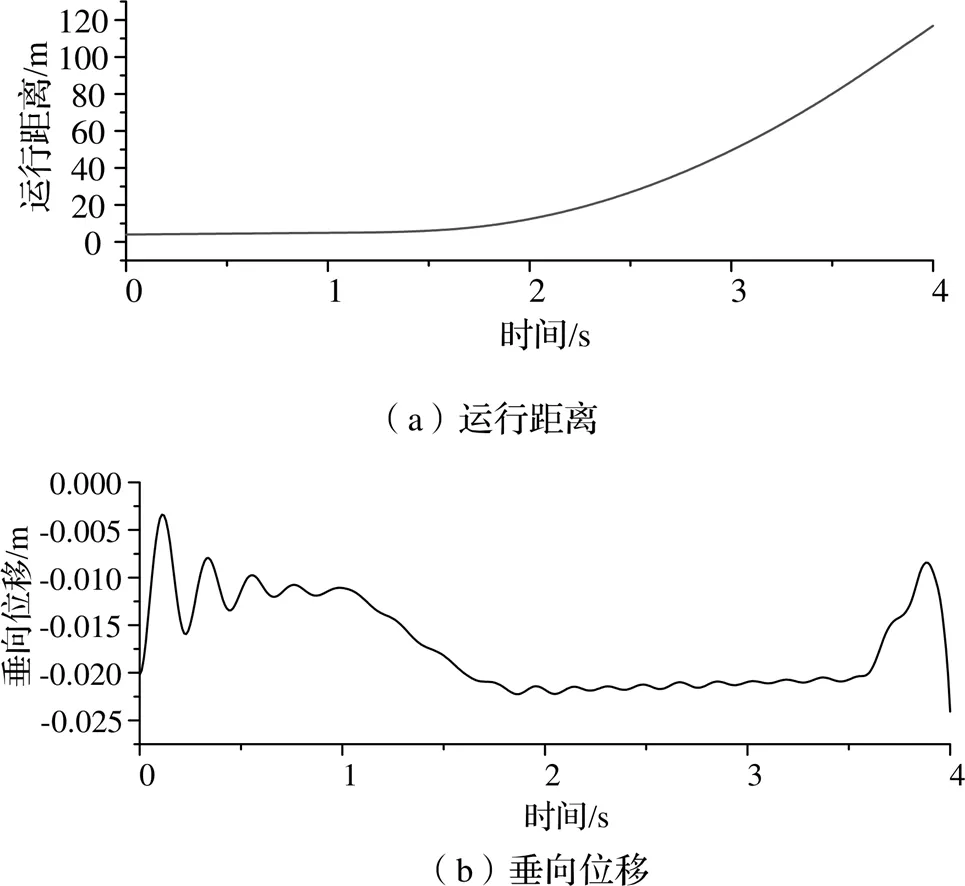
图5 四轮质量车垂向位移时间历程

图6 四轮质量车速度时间历程
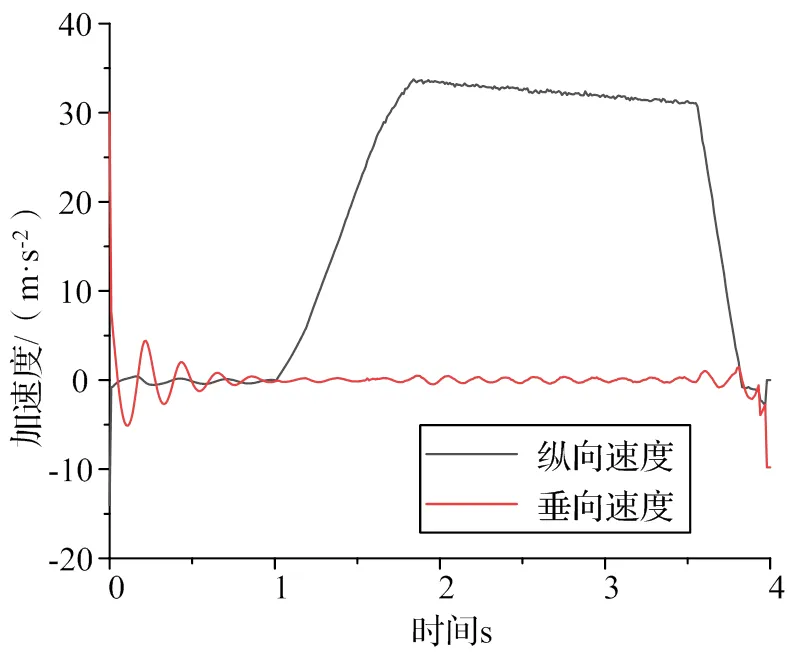
图7 四轮质量车加速度时间历程

图8 四轮质量车车轮垂向载荷时间历程
结合图4~8可以看出,质量车的垂向位移在运动过程中维持稳定,变化幅度较小;纵向速度呈线性增加,末速度在270 km/h左右,垂向速度基本为零;其纵向加速过程与载荷曲线的水平分量一一对应,而垂向加速度无明显变化,从而可以看出,质量车在运行过程中,主要受到纵向载荷的影响,垂向载荷的变化相对而言影响很小;车轮垂向载荷方面,前轮显着大于后轮,且左轮略大于右轮的垂向载荷,其原因可能是由于质量车车体的横移量引起的载荷偏移。
对于质量车而言,其关键评定指标为轮胎垂向力,即最大轮胎的垂向力不超过150 kN。从仿真结果来看,当8.5 t四轮质量车以末速度250 km/h运行时,轮胎垂向力满足标准要求。
同理,分别基于四轮质量车与六轮质量车的动力学模型,计算了不同载重下质量车的动力学指标,具体计算结果对比如表3所示。

表3 不同质量车模型动力学指标
从表3可以看出,在仿真计算的5个工况中,无论是小配重的四轮质量车还是大配重的六轮质量车,以不同末速度进行运动过程时,其最大的轮胎垂向力均小于150 kN,符合相应的标准要求。
与此同时,对比工况2/3/5不难看出,当末速度相同时,质量车的最大运动力、车轮载荷与纵向加速度与质量呈正相关;对比工况1/2与工况3/4可以得到,当质量车的类型及配重相同时,其最大运动力、车轮载荷与纵向加速度随着末速度的增加而增大。
3 偏航性能分析
在质量车的运动过程中,除开动力学的指标外,其运行姿态也将引起明显的偏航效应,具体表现在车体横向位移、点头角速度与角加速度等指标。
为与动力学分析形成对应关系,质量车的偏航特性也选取同样的计算工况。图9与图10分别为8.5 t四轮质量车以末速度250 km/h完成运动过程的车体横移量及点头角速度时间历程。
从图9可以看出,在四轮质量车的运动过程中,横向位移从第2 s开始逐渐增大,这与其水平分力的加载时间相对应。
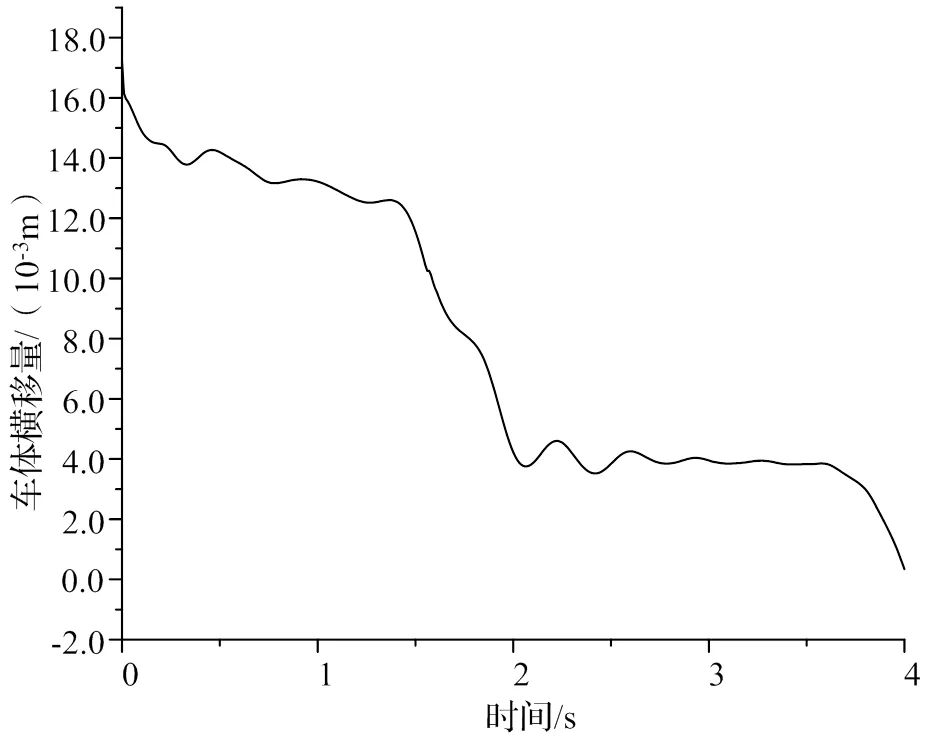
图9 四轮质量车横向位移时间历程
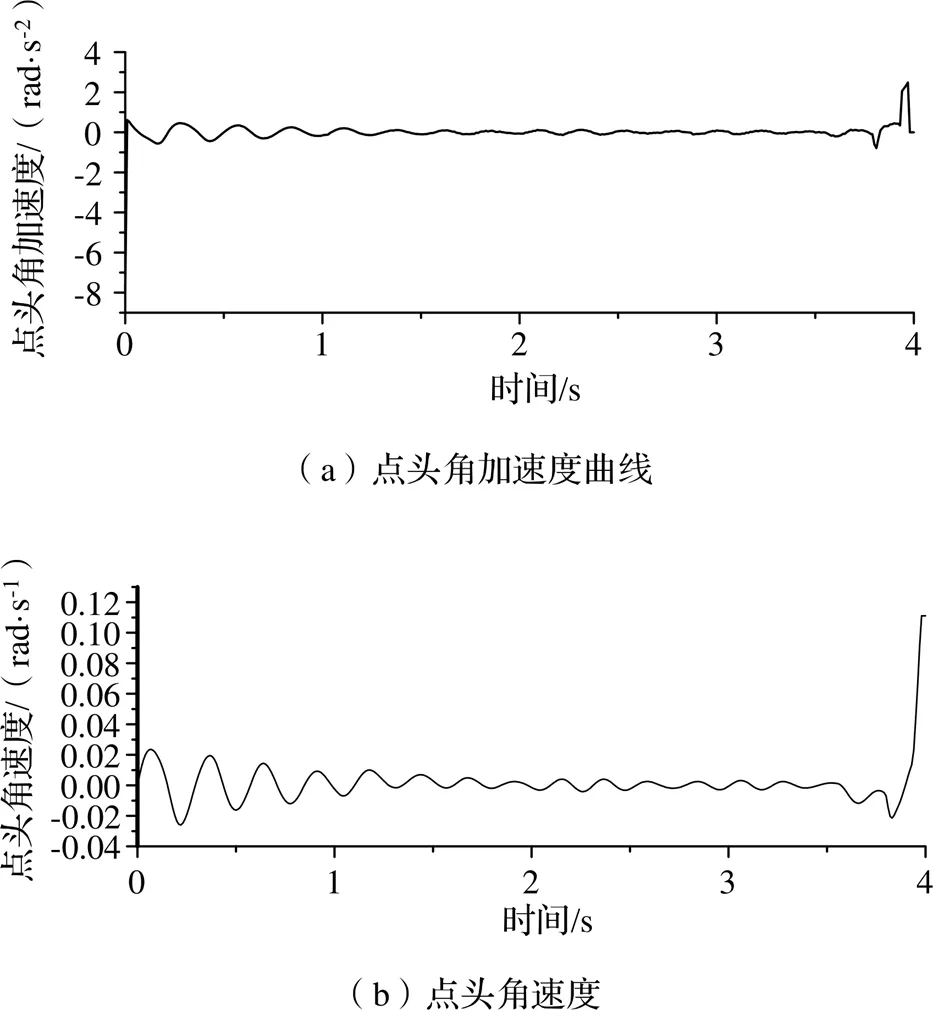
图10 四轮质量车点头角速度时间历程
而图10则揭示了质量车点头角速度与角加速度的变化波动较小,仅在载荷施加历程结束后有一个较大的突变。因此,可以判断,质量车的横移速度相对稳定,从而角加速度变化幅度较小。对于不同质量车在各工况下的偏航性能指标汇总如表4所示。

表4 质量车偏航特性指标
结合表4可以看出,各计算工况下,当质量车以相同末速度270 km/h运行时,车体的最大横移量为1.17 mm,出现在8.5 t的四轮质量车工况;最大点头角加速度为2.483 rad/s2,与横移量保持一致。而车体的最大点头角速度变化趋势与之相反。因此可以得到,车体的最大横移量与最大点头角加速度随着质量车的配重增大而减小,而最大点头角速度呈相反的趋势;当配重相同时,车体横移量随末速度的提高而减小。
4 结论
本文基于多体动力学理论,考虑了质量车轮胎的非线性特性,建立了精确的质量车模型。对比分析了不同类型质量车在运动过程中的动力学性能,同时得到了不同计算工况下质量车的偏航特性。主要结论如下:
(1)在运动过程中,质量车的垂向位移变化幅度较小;纵向速度呈线性增加,垂向速度基本为零;垂向加速度变化不明显,纵向加速度对应于纵向载荷特性曲线;
(2)各计算工况下,质量车的车轮垂向载荷均能满足标准要求,且前轮载荷显着大于后轮,左轮略大于右轮的垂向载荷;
(3)当质量车以相同末速度运行时,车体的最大横移量与最大点头角加速度随着质量车的配重增大而减小,而最大点头角速度趋势相反;当配重相同时,车体横移量随末速度的提高而减小。
[1]李杰,于川. 航空母舰的舰载机着舰装备[J]. 现代军事,2006,(10):56-58.
[2]孙晓羽. 舰船运动下舰载机阻拦着舰动力学分析与仿真[D]. 哈尔滨:哈尔滨工程大学,2012.
[3]朱齐丹,鲁鹏,杨智博. 质量车蒸汽运动系统仿真研究[J]. 哈尔滨工程大学学报,2018,39(12):1979-1986.
[4]朱齐丹,鲁鹏,杨智博,等. 舰载机运动起飞过程运动杆受力与安全性分析[J]. 华中科技大学学报(自然科学版),2019,47(5):110-115.
[5]张晓谞,张成亮,张育兴,等. 质量车负载阻拦动态特性研究[J]. 海军工程大学学报,2019,31(6):29-33.
[6]吴昊. 舰载机运动起飞仿真及安全指标分析[D]. 哈尔滨:哈尔滨工程大学,2016.
[7]杨莹,唐克兵,方雄,等. 舰载机运动起飞结构动态响应分析方法与应用[J]. 南京航空航天大学学报,2020,52(6):957-962.
[8]赵九峰. 基于ANSYS Workbench自控飞机回转机构驱动功率的计算及电机选型[J]. 机械,2019,46(4):30-33.
[9]李俊,张合吉,陈帅,等. 钢轨打磨小车振动特性及其对打磨质量影响的研究[J]. 机械,2020,47(8):44-51.
[10]包文奕,王浩,柯世堂. 基于多体动力学方法大型风力机台风致响应特性与偏航影响[J]. 振动与冲击,2020,39(15):257-265.
Dynamic and Yaw Performances Analysis in the Process of Motion for Mass Simulation Vehicle
BAO Jingyuan,MAO Rancheng,SUN Huiyi
( 1.The Second Military Representative Office of Haizhuang Wuhan Bureau,Wuhan 430064, China;2.State Key Laboratory of Traction Power, Southwest Jiaotong University,Chengdu 610031, China)
Aiming at the characteristics of the mass simulation vehicle, based on the multi-body dynamics theory, the dynamics model of the mass simulation vehicle was set up. Also, the load takes into account the nonlinear characteristics of the tire, and the dynamic index of the mass simulation vehicle under different load conditions was compared and analyzed. The results demonstrate that in the process of motion, the vertical displacement of the mass simulation vehicle changes little; the longitudinal speed increases linearly, with its longitudinal acceleration corresponding to the longitudinal load characteristic curve. In addition, the vertical load of the front wheel is significantly greater than the rear wheel, and the left wheel is slightly larger than the right wheel. Furthermore, when the mass simulation vehicle is running at the same speed, the maximum lateral displacement and the maximum pitch acceleration of the car body decrease with the increase of its counterweight, while the trend of the maximum pitch angular velocity is opposite. The research results can provide a certain reference for the design and dynamics analysis for the mass simulation vehicle.
mass simulation vehicle;motion process;dynamics performance;yaw behavior
TH113
A
10.3969/j.issn.1006-0316.2021.10.008
1006-0316 (2021) 10-0053-06
2021-2-24
鲍敬源(1977-),男,上海人,硕士,工程师,主要研究方向为舰船航空保障工程,E-mail:billbjy@sina.com。



