魏阿娟 吕明达 刘玉军
(一汽-大众汽车有限公司,长春130011)
1 前言
焊装车间点焊工艺是现代白车身制造中应用最广泛且可靠的连接技术,生产中对点焊工艺本身的优化已经相当成熟。在近年的整车制造中,随着人工成本的增加,同时为了进一步提高生产效率,点焊自动换帽电极修磨器设备得到大量应用。研究焊钳电极帽自动换帽设备的重要性可以从3个维度进行分析。
a.电极端面修磨质量是保证白车身强度的重要一环。在整车厂对白车身焊点的超声波检测及破坏性检测中,普遍采用焊点直径与板厚的计算关系来表征焊点的强度,而焊点直径与表面状态实际是电极端面直径与表面状态的反馈[1]。焊接若干焊点后,电极端面直径增加,导致电流密度降低,进而影响焊点强度[2],生产中通过电极修磨器恢复电极端面直径。
b.自动换帽修磨器的工作状态直接影响生产线的设备开动率,尤其对于混线融入的生产线,改造后新安装修磨器的调试状态会直接影响批量车的焊点,质量优化压力大,需要在一定进度范围内完成修磨器设备调试,实现稳定生产。
c.修磨器相关参数的优化设定,直接影响整车厂维修部门的电极帽消耗成本,产能1200台/天的生产车间电极帽消耗成本每年达到几百万人民币,因此有必要使修磨器参数尽可能优化以延长电极帽使用寿命,降低生产投入。结合工作经验总结,对自动换帽修磨器设备安装调试的影响因素进行综合分析。
2 生产线项目前提及设备概况
基于自动换帽修磨器设备的调试工作开展研究,生产线项目为翻新改造,项目前提信息见表1。表1项目进度要求集中改造后迅速爬产并恢复车身质量,其中自动换帽修磨器调试是点焊质量恢复的关键因素,项目中修磨器设备的调试概况见表2。表2设备安装后调试过程经历了参数调整、机器人与自动换帽修磨器设备联调、修磨效果优化、焊点质量认证、批量生产监控以及定期维护保养几个阶段。针对调试过程中发生率较高的电极帽端面铣削不净、电阻值异常报警以及自动换帽装置刀头内部夹爪堵塞问题,从参数入手,经过机器人轨迹调试,并深入到修磨器内置电机功率优化及刀具尺寸优化,最终设备实现稳定生产。
表1 生产线改造前提
表2 自动换帽修磨器安装调试情况
3 自动换帽修磨器调试影响因素分析
3.1 修磨器可调参数影响
3.1.1 修磨压力
电极修磨器铣削旋转的同时对电极帽表面施加修磨压力,压力增大,会增加铣削时刀片切入电极帽的深度,影响铜屑厚度,增加铣削量。当压力增加到一定程度,铣削效果不再发生变化,压力过大同时易造成铜屑堵塞;修磨压力过小,铣削量不足,电极帽电极端面直径无法恢复,影响焊点强度,达不到生产要求。实际建议的修磨压力范围为800~1500 N。
3.1.2 修磨圈数
电极帽极限修磨次数=可用端面厚度/单次修磨量[3]。修磨圈数是与单次修磨量强相关的参数之一。修磨圈数正常在3~6圈,修磨圈数过多,会降低电极帽的使用寿命,增加生产成本。修磨圈数过少,铣削效果欠佳。也可以用另一个参数修磨时间来表征,正常修磨时间为1 s,增大修磨器内置电机功率,提高转速,可以在相同时间内增加修磨圈数,改善铣削效果。现场修磨电机转速从225 r/min提升至490 r/min后的修磨状态变化如图1所示,图1a、图1b为电机转速225 r/min时的修磨表面状态,图1c为电机转速490 r/min时的修磨表面状态,可以看出同等时间内修磨圈数增多,电极帽修磨后表面残留物及凹坑消失,光洁度提高。
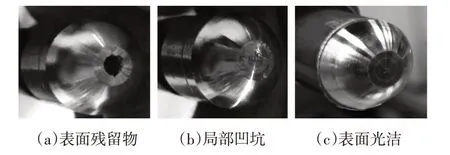
图1 电机转速对电极帽表面修磨质量的影响
3.1.3 修磨频次
焊枪电极帽寿命=修磨间隔点×修磨总次数[3]。修磨间隔点即修磨频次,指间隔多少个焊点修磨一次。一般在40~120间隔点之间反复调节并结合超声波和破坏性焊点检测验证,以保证整个周期内所有焊点质量合格。对于车身底部的热成形钢板,由于材料抗变形能力强于普通镀锌钢板,需采用软规范焊接工艺,焊接时间比普通板材的焊接时间长,因此完成相同焊点数后电极帽受热时间更长,所产生的表面变形量更大,需适当提高修磨频次,缩减铣削间隔周期,以保证稳定的焊点直径。
3.1.4 吹气时间
实际生产中修磨器刀片铣削的同时会开启吹气装置,并在焊枪离开修磨器后保持吹气状态和修磨器旋转状态5~10 s,确保铜屑能够全部脱离。与铣削效果无关,该参数的调整取决于修磨铜屑的排屑情况,当铜屑堵塞时,可适当加长吹气时间来调整。如调整后仍不能改善铜屑堵塞的情况,需排查电极帽是否有粘连的情况。当焊接飞溅大或焊点附近有溢胶发生时,电极帽表面易发生粘连,不利于铜屑排出,进而影响铣削端面效果,同时易污染修磨器自动换帽系统,造成换帽报警,最终使电极帽拆卸失败,这种情况需要对设备进行维护清理。
3.2 修磨器恒定参数(刀具相关参数)影响
修磨器设备自身核心的设计在于刀具,刀具的相关参数将直接影响修磨效果。
3.2.1 刀片尺寸
刀片设计优化主要集中在2个方面,一方面是通过优化刀片尺寸控制电极帽修磨量,避免刀片间断修磨导致电极帽端面产生花纹;另一方面是通过优化刀片尺寸增加电极帽包裹性,避免电极帽修磨偏移产生凸台和粘铜屑问题。刀片尺寸设计的相关参数包括刀刃角度、刀片角度、刀片先端长度、刀刃圆弧度(这一参数与刀架的匹配尺寸有关,涉及维修备件的统一性,因此无法轻易更改)、刀片厚度。
3.2.2 刀具硬度
市场上普遍采用高速合金钢刀片,经热处理后,硬度达到60~65 HRC之间。硬度过低无法实现良好的铣削质量,硬度过高易使刀刃脆性大,在铣削过程中崩裂。
3.2.3 刀具后角
刀具后角代表刀具的磨损情况,在实际生产中应注意定期观察,一般刀具使用寿命在10000次左右,如果按照日产1000台的车间产量计算,大致使用周期在3个月左右。刀具备件的价格在几百到上千元人民币不等,备件价格也是成本投入的重要组成部分。在预批量爬产阶段,应注意在现场预留少部分刀具备件,用以更换后角严重磨损的刀具。一种提高刀具使用寿命的猜想,即使用一段时间后,调换刀具的受力面,将原来电极帽由铣刀A面铣削换成B面铣削。但由于机器人轨迹基本无法实现180°调转,故这一措施未被列入有效措施方式。也有学者曾研究过转速和压力对刀具后角相对磨损量的影响规律,以后刀面相对磨损量、转速和压力建立三维模型,模拟结论为,在低压力、高转速时,相对磨损量较大;在高压力、高转速时,相对磨损量较小[4]。
实际生产中,刀具规格一经选型无法更改,只有当现场问题无法通过可调整参数优化解决时,才会重新考虑刀具规格的优化,但这一措施会对项目进度及成本产生不良影响,因此,在项目初期大量安装应用前对刀具进行测试试验愈显重要,也是值得整车厂讨论的技术选题之一。
3.3 机器人相关因素影响
机器人是自动换帽修磨动作的直接执行者,焊钳与修磨器之间发生交互作用的连接者,因此,机器人相关参数调整亦是优化修磨质量的核心因素。值得注意的是,实际设备安装过程中,通常机器人工程师与修磨器技术服务人员因工作内容、学习专业差异,考虑问题侧重点不同,生产出现问题时需要双方协同解决,这也是影响自动换帽修磨器调试进度的关键点之一。
3.3.1 机器人自动换帽修磨动作流程
与人工换帽修磨器相比,除调整修磨器自身可调参数及刀具恒定参数外,机器人自动换帽修磨器的动作流程更为复杂,机器人与修磨器的联调配合要求更高。机器人自动换帽修磨系统结构如图2所示。机器人自动换帽修磨步骤如图3所示,现场实际的调试动作与仿真过程完全一致。
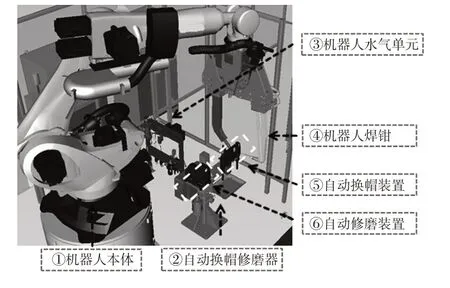
图2 机器人自动换帽修磨系统
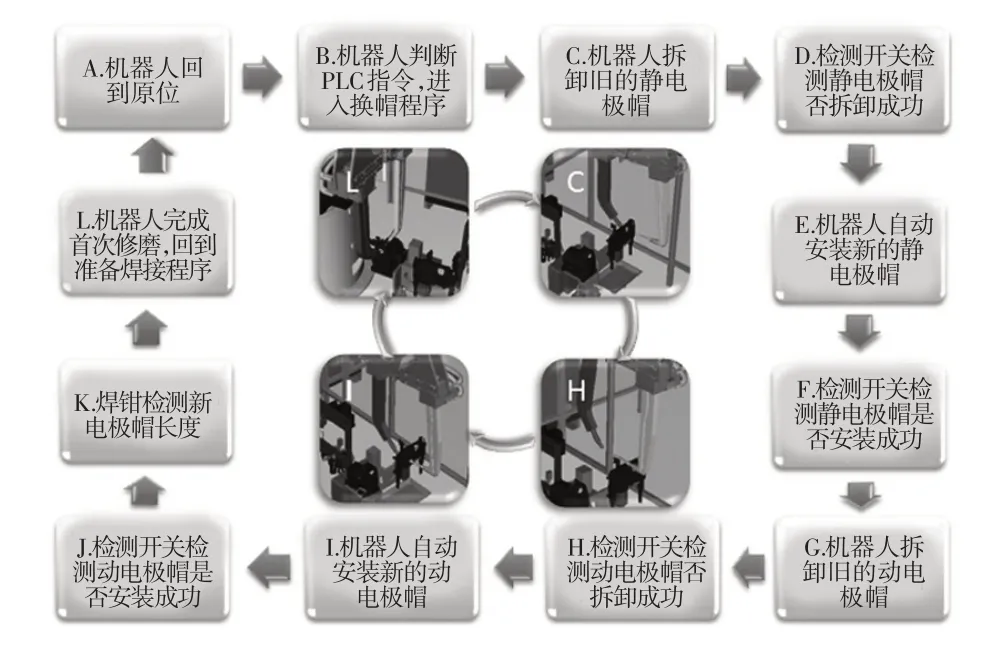
图3 机器人自动换帽修磨步骤
以上自动换帽流程中,机器人的换帽轨迹、机器人焊钳与检测开关的相对位置、检测信号的程序反馈以及换帽装置内电极帽是否滑动顺畅均会影响设备调试效果,另外由于非人工干预,机器人换帽过程中无法避免残胶及焊渣进入换帽夹爪内,长期累积易造成夹爪卡死。
3.3.2 机器人修磨轨迹
机器人焊钳在自动修磨时焊钳上下电极的对中性直接影响修磨效果,使用双刃修磨刀具可以降低对中性的要求,但会增加修磨器的直接成本,一般主机厂不会予以采用。通过使用修磨器厂家开发的对正装置,在安装前期阶段协助机器人焊钳完成上下电极对正示教是切实可行的方法之一。机器人修磨时轨迹是否与其它设备有所干涉,也是修磨的基本前提。
3.3.3 焊钳开口大小
为了减小铣削开始时刀具对电极帽表面的震痕损伤,即扎刀情况的发生,应注意修磨前调整焊钳的开口大小。焊钳铣削前开口太大(8~10 cm)会导致焊钳动极臂侧电极帽对刀刃敲击力大,单侧刀刃损坏加快。铣削前开口应该调节在2 cm左右较为合适。
3.3.4 电极帽长度检测
机器人焊钳会在每次修磨后完成一次电极帽长度尺寸标定,一般取0.1~0.3 mm修磨量之间为正常范围,设定2 mm修磨量为报警上线。当修磨量异常时,焊钳模块会自动发出报警信号。实际生产中,此类故障的发生频次非常低。
3.3.5 焊钳平衡气缸调节
焊钳修磨前的稳定性亦会对修磨效果产生影响,因此,生产初始机器人工程师应注意平衡气缸参数的调节,以确保不同焊钳铣削姿态下电极帽始终对刀片没有力的作用。
3.3.6 检测开关位置
机器人焊钳自动修磨时,会与修磨器检测开关发生两次交互动作,第一次发生在旧电极帽拆卸之后,开关会检测旧帽是否拆卸成功,并传输相关信号,如果拆卸不成功,机器人则会循环执行拆帽动作;第二次发生在换帽后,开关自动检测新帽是否安装成功,机器人等待感应器反馈信号,如果未接收到反馈信号,机器人会直接停台报警,需要人工干预检查后消除。对于机器人报警信号的识别,这又是另一值得深入讨论的话题,由于每一个主机厂执行的电气标准有所差异,因此对源程序号的规定也有所不同。
实际生产中,为了尽可能延长电极帽的使用寿命,降低更换频次,维修人员会不断调整修磨次数,尽可能地缩短电极帽报废时的极限长度,但又保证不被铣漏,这也意味着与设备安装调试时的初始电极帽极限长度设置有所偏差,易导致机器人焊钳换帽时因电极帽极限长度变短,检测开关无法检测到电极帽,致使修磨器拆帽失败。此时需要反复调整机器人轨迹,让电极帽距离感应开关更近一些,一般建议距离2~3 mm。实际生产中也有发生因为检测开关支架松动或电极帽更换完成后因焊钳抖动致使夹紧失败,造成换帽后开关仍无法检测到电极帽的情况,引起重复装帽,因此检测开关是设备调试中值得被关注的因素之一。
3.3.7 电阻值监控
现场焊钳参数设定PSQ自动补偿模式,即恒功率输入法焊接,当铣削不净或有铜屑粘连时,电极帽端面电阻值过高,会引起异常报警(经验基准数值R在65~80μΩ左右,上下偏差带15%,3次超过阻值15%就会异常报警)。实际中,在保证铣削状态良好的前提下,为了保证生产,电阻监控参考基准值R会依据修磨器刀片状态进行微调整。正常稳定生产状态下采集的电阻值分布见下图4a,所有电阻值均分布在公差带内,没有报警。自动换帽电极修磨器预批量生产调试中,当修磨状态不稳定时,采集的电阻值分布见图4b,部分电阻值超出公差带,引起异常报警,需要分析异常原因,优化修磨质量后,更新采集数据,确定合理的电阻值范围,确保批量生产中设备开动率的稳定性。
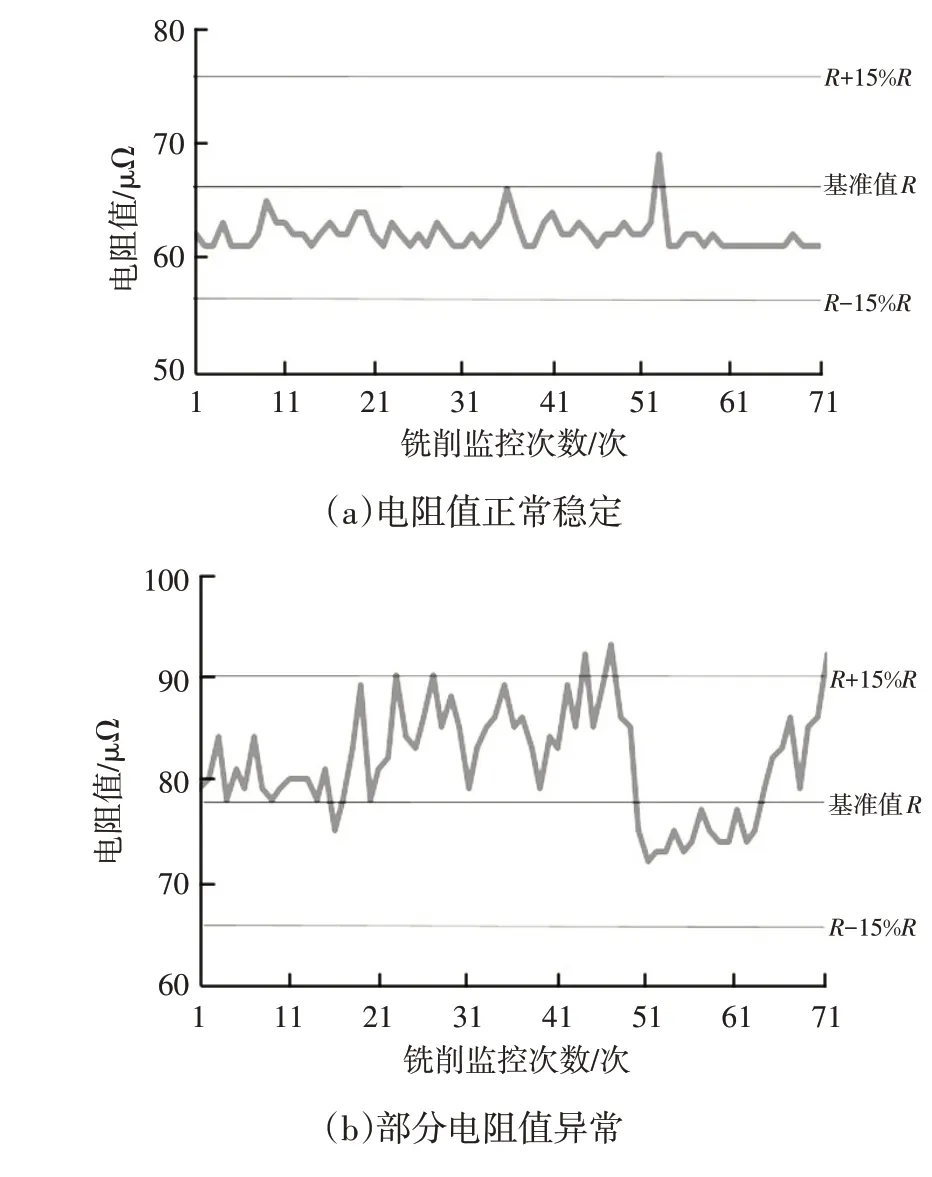
图4 采用PSQ监控修磨过程电阻值
3.4 人为干扰因素影响
生产调试过程中总结发现,人为因素也成为电极修磨器调试故障的影响因素之一。
3.4.1 修磨器的包装运输
很多主机厂会采购国外的修磨器设备品牌,或者一些关键部件会从国外采购至国内组装,运输过程中包装不当,或者到厂安装过程中暴力运输,都易造成修磨器弹夹损坏,且由于生产线初始调试阶段产量较少,一般不会进行自动换帽调试,因此无法第一时间发现这种损坏,后期应用中才会通过排查发现。
3.4.2 人工调试操作失误
现场实际调试过程有因人员调试机器人轨迹不当,造成弹夹夹爪直接断裂的现象;因调用机器人宏程序有误致使机器人更换电极帽时夹紧器打开故障的现象。此类现象为偶发因素,通过提高调试人员技能水平可以基本消除。
3.4.3 设备安装问题
现场实际调试过程中有因铜屑收集器安装位置不合理,遮挡编程人员视角,导致电极帽修磨不净的情况。还有因修磨器地脚螺栓紧固不到位,造成螺丝松动,致使机器人换帽轨迹发生变化,出现铣削问题的现象。
通过以上分析,应加强设备从运输到安装调试的各环节管理,才能保障设备自身稳定性。
3.5 维护保养的影响
修磨器的维护保养亦是保障理想修磨效果的重要一环,对于批量生产来说,定期维护可以最大限度降低紧急停台故障的频次。预批量阶段由于产量少,易忽略设备维护保养,应尽早开始标准化设备保养操作。
3.5.1 电极帽填充
电极帽填充时应将供给器内剩余的电极帽放置于供给器前端,优先使用,或者将电极帽彻底用完后填充更换,避免后端老化电极帽长期未使用而发生粘连,造成电极帽供给卡顿。填充电极帽时应将供给器取出后填充,对供给器及其插座进行清洁,并去除多余的水分,防止锈蚀。
3.5.2 拆帽装置保养
定期对拆帽装置进行清洁,保证拆帽装置正常工作,避免焊钳电极帽表面胶的残留堆积。同时,定期可对拆帽装置内部喷涂适量的除锈剂和润滑油,保证卡爪的正常翻转,有必要时对拆帽装置进行拆卸维护保养工作,避免拆帽装置内部因焊枪余水发生氧化或者焊渣杂质堆积,导致卡爪卡顿现象。
4 自动换帽修磨器应用成本分析
自动换帽修磨器是传统人工换帽修磨器技术更新后的产品,是焊装车间利用设备技术改革替代传统人力、提升生产线自动化程度及设备开动率的典型案例。自动换帽设备的应用带来的成本优势从定性分析见表3,从表中分析可以看出,自动换帽设备与传统人工换帽设备相比,会带来设备采购成本的一次性投入增加,但可以延长电极帽及电极杆使用极限寿命,降低备件消耗成本。从项目全生命周期考虑,自动换帽修磨器设备具备成本节约优势。
整车厂在进行设备选型时需考虑多方面因素,经济性因素需要结合具体方案、设备品牌及数量进行详细理论计算,表3中分析依据价格仅为参考价格。通过分析可以看出,自动换帽修磨器具有长期成本优势,同时可以提升生产线自动化率,减少人工操作,也因此在现代汽车制造中得到推广应用。
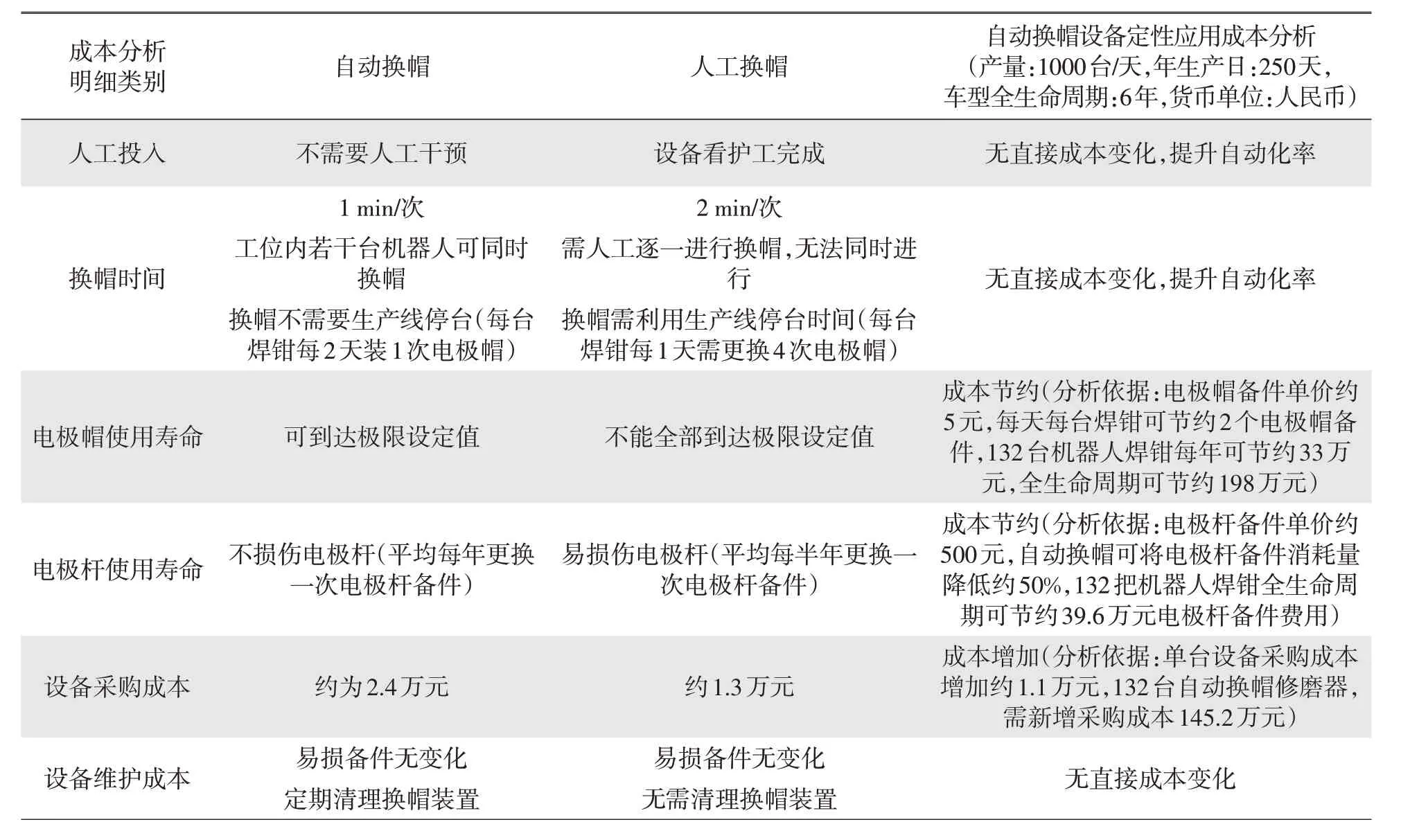
表3 自动换帽与人工换帽修磨器应用成本对比
5 结束语
焊钳电极帽表面状态是影响机器人点焊过程的重要因素。为了保证焊点质量,必须控制自动换帽修磨器的铣削效果。自动换帽修磨器设备调试影响因素复杂,调试中根据实际情况,调整修磨压力、修磨圈数、修磨频次及吹气时间,定期观察刀具的磨损状态,优化机器人修磨换帽轨迹、焊钳开口大小、检测开关位置等机器人与修磨器交互过程因素,消除电阻值异常报警,在设备调试过程中避免安装松动及人为操作错误,并且从项目初期尽早标准化电极帽填充操作,定期保养拆帽装置,可以最大化保证自动换帽修磨器设备的调试效果,发挥设备在项目全生命周期内的成本优势。



