赵新平
(阳煤集团技术中心机电研究所,山西 阳泉 045008)
引 言
罐道是一段固定在井壁上的槽钢,对罐笼起着限位和导向的作用。有时会因井壁周围的地质应力变化而发生变形,这种变形开始往往是缓慢而逐渐的,不易被觉察。但时间长了,就可能发生较大的量变。如果发现不及时,有可能发生提升事故,所以应该定期检查测量。但是,井筒深度都在几百米以上,不同的深度,间距变化也不同,采用传统的人工法,测量起来很不方便,且误差较大,更不能进行数据微变分析,给井筒的安全工作带来不便[1-2]。连接示意图见图1。
图1 连接示意图
1 罐道测距法对比(见表1)
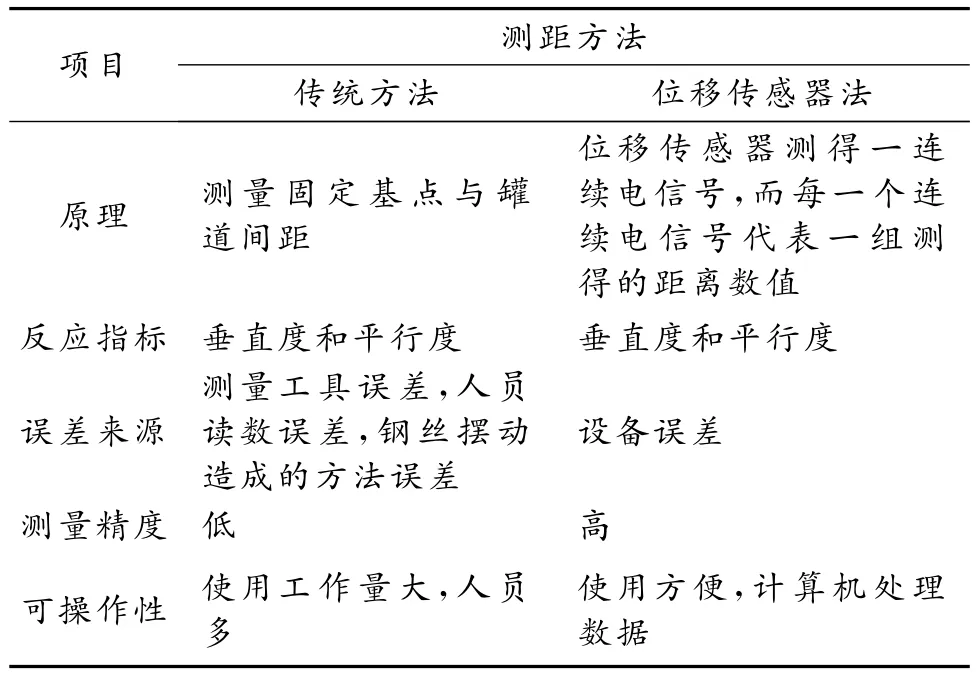
表1 罐道测距法对比表
2 位移传感器法
2.1 仪器组成及其框图
该装置专用于罐道间距的精确测量,主要由1台测量主机、2只高精度位移传感器、1只深度测量传感器、电池等组成。
2.2 设计原理
为实现自动测量,将所需各传感器及数据采集器合理安装在行走机构上。行走机构可安装在罐笼上。安装测量示意图见第52页图2。
2.2.1 测量主机
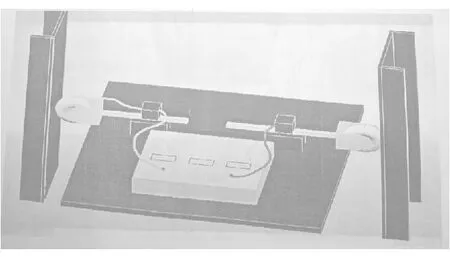
图2 安装测量示意图
测量主机采用的是80C51系列单片机。显示采用标准LED显示器,主要显示初始位置测量值、各个测量点测量值、数据采集状态、通讯状态等。采用全双工异步串行口,用以实现单片机与其他设备数据传输。
2.2.2 深度测量传感器
深度测量的目的是标记行走机构在管道上相对井口的距离。它由行程编码器和信号转换电路组成。
2.2.3 模拟电路和模拟数字混合电路
高速采样模拟数字混合电路采用32位分辨率的ICL7135,它由片内1V电压基准器、内部时钟、抽样/信号放大器、低通滤波器、微处理器以及数据缓冲器等组成。
测量时行走机构是运动的,仪器进入自动检测状态时,罐笼可以开始慢速下降,仪器会实时显示当前管道间距变化及下降深度,并每隔一定距离将当前一组数据存储在相应的存储芯片中。
2.2.4 计算机及通信系统
计算机主要把现场采集到的数据进行保存、处理,将其转换成图表的形式,并显示打印输出。
通信方式采用串行通信,主要由串口模块RS485和通信电缆组成。
2.3 系统软件
系统软件采用C++语言编写,运行环境Windows XP环境,主要功能为取测量主机中测量的数据、各设定值的输入、测量结果的分析、显示和打印等。
3 应用前景及效果
该系统在阳煤集团一矿用于罐道间距测量,装置运行可靠,取得了良好效果:1)该项目攻克了罐道间距在线检测技术的难题,实现了罐道间距在线检测,有利于准确了解罐道间距,及时进行故障预测,提高检修计划的准确性和目的性;2)该技术测量用时时间短,对生产影响小,资金投入少,检测效率高;3)完全避免了人为检测的误差,提高了测量精度,确保了安全提升。
[1] 张友德.飞利浦80C51系列单片机原理与应用技术手册[M].北京:航空航天大学出版社,1992.
[2] 何立民.MCS-51系列单片机应用系统设计系统配置与接口技术[M].北京:航空航天大学出版社,1990.



