王行
摘 要:以DWPI专利数据库收录的专利为样本,从专利的视角对车道保持辅助系统技术进行的统计和分析,通过对技术主题的统计和分析,了解车道保持辅助系统技术的发展现状,理清该领域的发展脉络和专利分布情况。
关键词:车道保持;驾驶辅助;主动控制;预警算法;信息传感
截止2016年11月,在德温特DWPI数据库中检索到涉及车道保持辅助系统的全球专利申请共计2480项。本文在这一数据的基础上从专利申请的技术主题来对LKA车道保持技术的全球专利状况进行分析。
技术主题分析
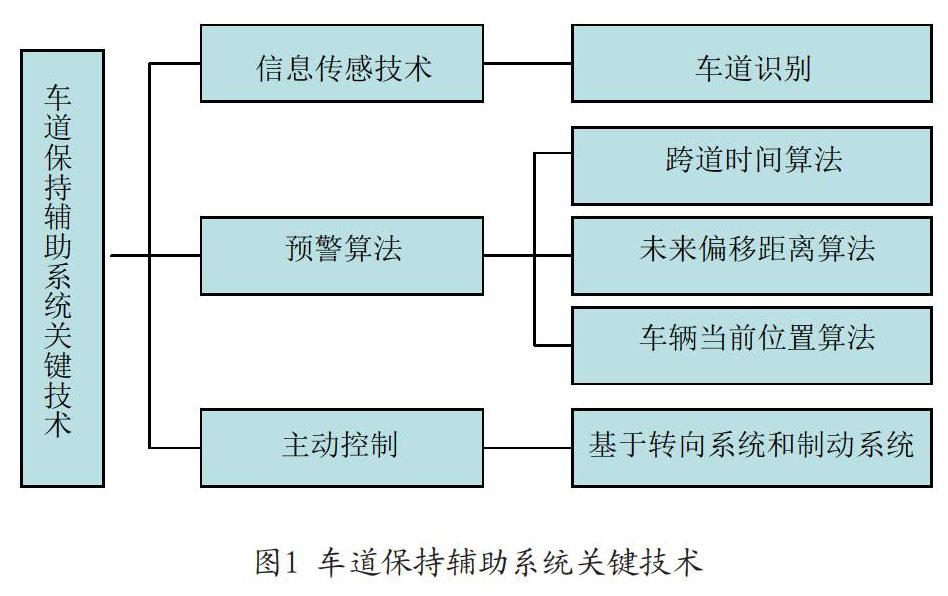
智能汽车LKA车道保持技术的关键技术可以包括信息传感技术、预警算法、主动控制这三个方面。
信息传感技术
信息传感技术的传感精度会对车道线的识别准确度有直接的影响[1],且对行驶车道的识别可以有多种方法,LKA车道保持技术可以采用视觉传感技术来对车道进行识别,也可以采用雷达技术来对车道进行监测,同样,还可以使用GPS技术来对车道及其走向进行识别和判断,进而提供驾驶辅助。
罗伯特博世有限公司的专利DE102004061998A1提出了一种用于机动车的立体摄像机,通过多个摄像头同时工作的方式进行车道识别。
为了达到更高的车道识别精度,韩国现代株式会社的专US2014118182A1在车道保持辅助系统中提出同时采用摄影机和雷达识别车辆正在行驶的当前车道的位置的方法。使用雷达识别固定障碍物的位置,计算行驶方向道路的整个宽度,使用摄影机检测当前车道宽度,从上述信息识别行驶方向道路的所有车道的数量和车辆正在行驶的车道。
预警算法
针对预警算法而言,传统的使用单一算法的使用范围非常有限,因此会导致LKA车道保持技术的误报警率偏高,会对驾驶员的行车过程造成不必要的干扰,因此,有些驾驶员在车辆的行驶过程中会选择关闭车道报警辅助装置。目前,常规使用的预警算法有车辆当前位置(Cars Center Position,CCP)算法、未来偏移距离(Future Offest Distance,FOD)算法和跨道时间(Time to Lane Cross,TLC)算法以及对上述三种算法的相关改进。各国相关企业和研究机构致力于研究更高精度的预警算法和如何改进现有算法,降低车道保持辅助系统的误警率和漏警率。
TLC算法具有预警时间较长、能给驾驶员预留较长的反应时间、且应用广泛的优点,罗伯特博世的申请DE102011081892A中就是采用TLC算法进行预警判断的。
CCP算法可用汽车在道路上的当前位置作为评价指标的优点,但对车辆定位传感器精度要求较高。杭州电子科技大学提出了一种采用CCP算法进行车道偏离决策的方法,降低了辅助系统的误警率。
主动控制
LKA车道保持技术目前还不是法规强制要求的车辆配置,但车辆行驶工况复杂,主动控制车辆回归原车道不仅算法较复杂,且对执行机构要求也较高。中高端车型装配车道保持辅助系统的主动控制的执行机构可分为制动和转向两类系统,其中基于制动系统的LKA车道保持技术通过控制左、右车轮的制动力矩产生差动制动来实现对车辆运动状态的控制;而基于转向系统的LKA车道保持系统包括基于电动转向系统的车道保持系统和基于线控转向系统的车道保持,其技术原理是利用电机控制转向器来改变车轮的运动;在LKA车道保持系统进行主动控制时,一旦驾驶员介入操纵车辆,车道保持辅助系统会停止控制由驾驶员接管车辆,避免引起人机冲突,造成驾驶员的反感。
丰田自动车株式会社的专利US2012029773A中车辆的控制装置通过主动转向机构对车辆进行车道保持辅助控制。转向机构既可以是线控转向(SBW)等电动转角可变机构,也可以是电子控制助力转向系统(EPS)。
通用汽车有限责任公司的专利US2012283907A中采用差动制动控制器以输出差动制动命令给差动制动系统,其中输出的制动命令指示差动制动系统为车辆车轮施加制动力,通过施加的制动力,使车辆沿着为车道居中操作确定的期望路径行驶。
总结
本文以车道保持辅助系统技术相关专利申请为研究对象,对全球专利申请进行统计和筛选,从LKA车道保持技术的发展过程来看,日本的日产(NISSAN)、丰田汽车公司(Toyota Motor Corporation)、富士重工(Fuji Heavy Industries)、电装(DENSO)株式会社,德国的博世(BOSCH)、奥迪(Audi)和美国的通用汽车公司(General Motors Company,GM)等少数技术积累深厚的公司,在技术上引领了该技术领域的发展和革新,相对来说,我国在LKA车道保持技术方面起步时间较晚,相关的技术研究也不够深入,仍有很多的技术难题需要攻克。
参考文献
[1]张德兆.基于弯道行驶的车辆自适应巡航控制[D],清华大学博世学位论文,2011.



