吕晓林/中国人民解放军92419 部队,辽宁省 兴城市 125106
研究了无人机的安全概率计算模型,将飞行任务分为发射起飞、飞行与回收三个阶段,对各阶段的安全性进行计算,分析了无人机飞行航路设计和飞行航区设置对安全概率的影响,并提出了有利于飞行安全性的航路和航区设置原则。
某型无人机采用火箭助推起飞,程序控制爬升到预定安全高度后,按照预定航线自主导航飞行,完成飞行任务后,按照预定回收区域进行自主回收。由于无人机飞行速度快、航程远,飞行航区覆盖面广,航区内既有陆上重要设施、人口密集区,还有海上重要保护目标、重要生产生活设施等,需要对其飞行安全性进行分析和计算,探索安全使用方法和途径。
无人机基本情况
无人机系统包括发射分系统、无人机(机体、发动机、导航控制分系统、电气分系统)和测控分系统。
无人机具备程序控制、自主和遥控三种飞行控制模式,同时具备自主安全控制功能。在飞行控制系统中,采取了以下安全措施:
(1)机载两套卫星导航定位设备,两者互为备份;
(2)采用卫星导航定位系统输出的高度H与,通过高度稳定回路操纵升降舵,完成飞行高度的稳定与操纵;同时大气机测定的高度H与作为备份;
(3)以卫星导航定位系统输出的航迹角为主进行导航控制,以磁航向作为备份。
无人机具有自主安全控制功能。起飞前可装订安全控制区域,安全控制系统实时判断无人机位置,如果连续判断无人机在安全控制区域外,则无人机执行安安全控制措施。
飞行安全性分析
飞行基本过程
无人机通电测试合格后,发动机开车,油门推到最大,转速稳定后,助推器点火,无人机起飞后按预定程序爬升,爬升结束后以自主飞行为主,遥控为辅。自主飞行中,以机载的卫星导航定位系统进行定位,并与给定航路进行比较,从而完成飞行任务。在自主飞行过程中,可以由地面站发送“人工引导”指令,进入遥控飞行模式。飞行结束后,无人机自主飞到预定区域进行回收。
可靠性分析
(1)发射段可靠性分析
在完成所有检测程序后,先启动发动机置慢车状态,并按照发射时的环境温度、海拔高度将发动机的转速推至修正额定状态;然后再点燃火箭助推器,当火箭助推器的推力值达到一定时,闭锁机构的中的拉断螺栓被拉断,无人机离开发射车轨道。当火箭助推器工作结束后,自行脱落。无人机发动机转速由修正额定状态转换至额定状态,以满足无人机正常飞行需要。
无人机发射可靠性模型如图1所示。
发射可靠性为R发射=R动力×R点火×R火箭×R火箭。
(2)飞行可靠性分析
无人机起飞后,进入程序爬高,然后可以遥控或自主飞行。若遥控失效,自动按供靶航路自主导航控制飞行。若GPS失效,则进行航路外推并转遥控;若GPS和遥控都失效,无人机自主飞行到预先设置的坠毁区域坠落,以确保重要设施和目标的安全。
无人机可通过遥控链路接收遥控指令、航路和航点等信息;通过遥测链路发送GPS数据、无人机飞行状态参数、遥控回令和无人机当前模式等信息。
无人机飞行可靠性模型如图2所示。

图1 发射可靠性模型
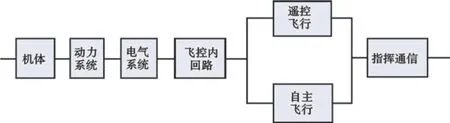
图2 飞行可靠性模型
飞行可靠性为R飞行=R机体×R动力×R电气×R飞控×[1-(1-R遥控飞行)×(1×R自主飞行)]×R指挥通信。
(3)回收可靠性分析
在飞行结束后,人工遥控或自主飞行到预定回收区进行回收,回收可靠性为R回收。
综上所述,无人机飞行任务可靠性R=R发射×R飞行×R回收。
故障模式与危险概率
故障模式危害性分析概述
无人机飞行过程中,产生的危险主要包括:无人机或火箭助推器的落点在禁区以外,造成人员或设备等的损害。
具体包括:
(1)发射段中无人机和火箭助推器意外坠毁后,落点超出发射禁区;
(2)飞行中,无人机坠毁;
(3)回收时,无人机坠毁。
上述危险均可能造成人员伤亡、设备损坏、财产损失等事故。
根据相关的国军标,将故障严重性等级分成4级,如表1所示。

表1 故障严重性等级
根据相关国军标,将故障可能性等级分为5级:A、B、C、D和E,如表2所示。故障可能性等级即该故障模式在总的故障中发生的比例。

表2 故障可能性等级
故障模式与危险概率
(1)发射段危险概率
无人机发动机在正常使用寿命之内使用,其可靠度R动力可视为1。
点火控制系统的R点火可靠度视为1。
由于根据以往的经验,发动机和点火控制系统的可靠性可以看成1,那幺发射段的可靠性主要由火箭助推器的可靠度R火箭决定,根据火箭助推器的生产工艺过程和使用方式分析,火箭助推器的故障主要考虑为没有产生额定的推力值,并且主要应表现为没有被点燃。基于这样的假设,可以将火箭助推器视为成败型产品。在发射段中,如果两枚火箭只有一枚点燃,那幺就会产生危险。如下表所示,可以看出,发生危险的概率为:2R火箭×(1-R火箭)。
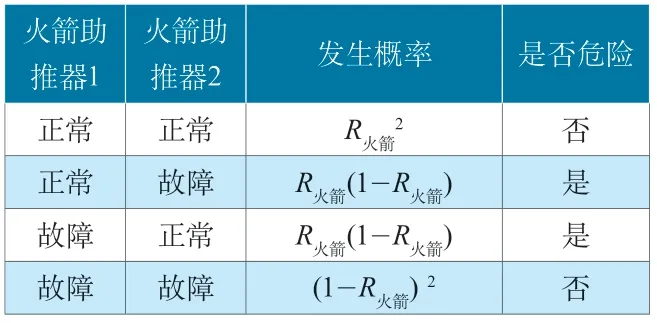
表3 发射段故障状态表
下面计算火箭助推器的可靠度R火箭。
根据火箭助推器的生产单位航天二员同类产品的统计数据,同类产品的试验次数n=50,失败次数f=0。现在对火箭助推器的单侧置信下限RL进行估计。由于f=0,因此,计算公式为

其中,γ为置信水平。
现取置信水平为80%,那幺RL=0.9701,则发射段任务成功的概率估计为:P发射=0.9701×0.9701=0.9411,单发火箭助推的概率估计为:2×0.9701×(1-0.9701)=0.0580,则发射段的危险概率为0.0580。
(2)飞行段危险概率
在飞行供靶段中,飞行时间按照t=1h来计算,则:
无人机的机体、动力系统和电气系统的可靠度R机体=R动力=R电气=1。
指挥通信设备的可靠度R指挥=0.9990。
无人机飞控系统的任务可靠度R飞控=0.9864。
自主飞行控制系统任务可靠度R自主=0.9996。
综上,无人机飞行段的任务可靠度为R=0.9864×(1-(1-0.9967)×(1-0.9996))×0.9990=0.9854。
现假设上述各分系统出现故障的概率相互独立,则可以计算出各种故障组合状态对应的发生概率如表4所示(其中,1表示正常,0表示故障)。
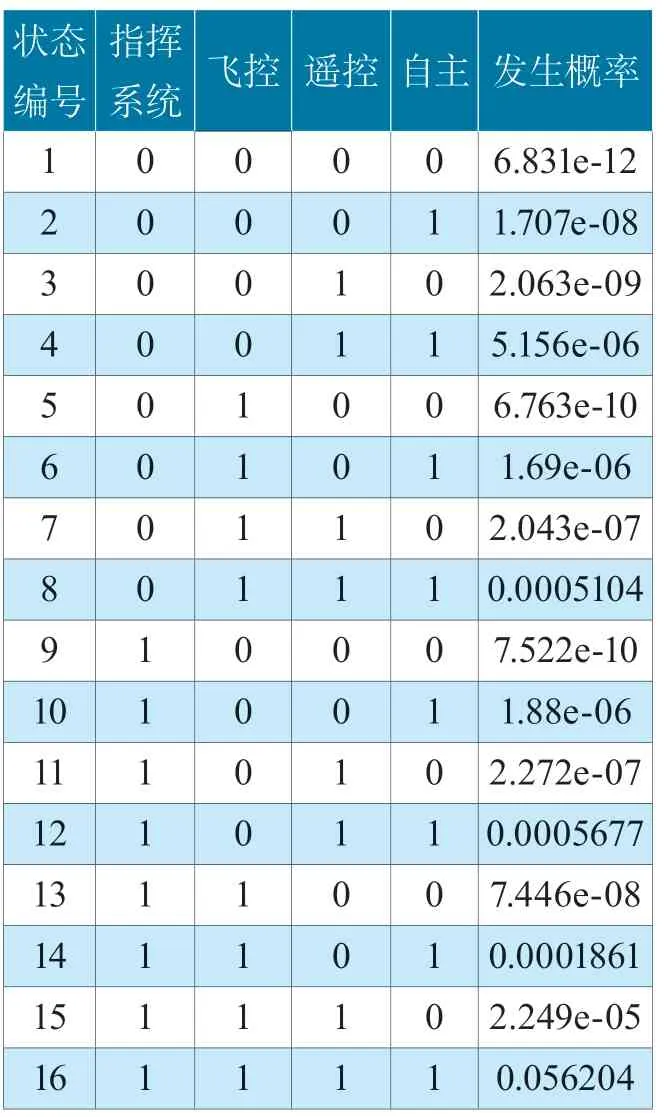
表4 故障状态发生概率表
现对表中的状态模式的发生概率与10-4进行比较,结果如表5。
由表中可见模式8、12、14、16共计4种模式的发生概率是大于10-4的。

表5 故障状态发生概率表
安全性分析
发射段安全性分析
无人机采用双发火箭助推零长发射方式,影响无人机发射安全的因素有:双发火箭点火不同步、双方火箭推力不同步、只有1枚火箭工作、发动机停车、无人机飞控系统故障、无人机电气系统断电。
助推火箭出厂前进行了双发火箭同步点火试验,确保双发火箭同步点火时间偏差、火箭推力偏差和拖尾段起始时间偏差满足指标要求。无人机放飞前,两枚火箭点火电缆处于并联状态,通过开关连接在点火电源上;在点火前要进行线路测试,确保点火电路无断路、短路现象,在技术上和措施上确保双发火箭点火的同步性。如果双方火箭推力存在一定偏差,会对无人机产生一定的扰动,可导致无人机航向最大偏差范围为±15°,这以后无人机会在飞控系统的作用下迅速纠偏,无人机不会继续发生偏航运动。
助推火箭内部点火线路上安置有低通滤波器,可以防静电防射频,确保火箭不会意外点火;另外每发火箭内部都有两套点火系统,只要有一套系统工作,火箭就可以正常点火;同时点火前要进行点火线路检测,确保两枚火箭点火正常。当只有1枚火箭工作时,无人机会翻滚、失控坠毁,不会对发射禁区外的目标造成威胁。
火箭点火以后,如果发动机突然停车,火箭推力产生低头力矩,无人机会快速坠入海中,不会对发射禁区外的目标造成威胁。
飞控系统出现机械故障的可能性很小,发射过程中,若舵系统出现问题,如舵面拉杆断裂,无人机会很快失控坠海;如果飞控计算机、陀螺平台、舵机出现问题,无人机会很快失控坠海,都不会威胁到发射禁区外目标的安全。
如果无人机电气系统突然断电,无人机马上失控、快速坠落,也不会对发射禁区外的目标造成威胁。
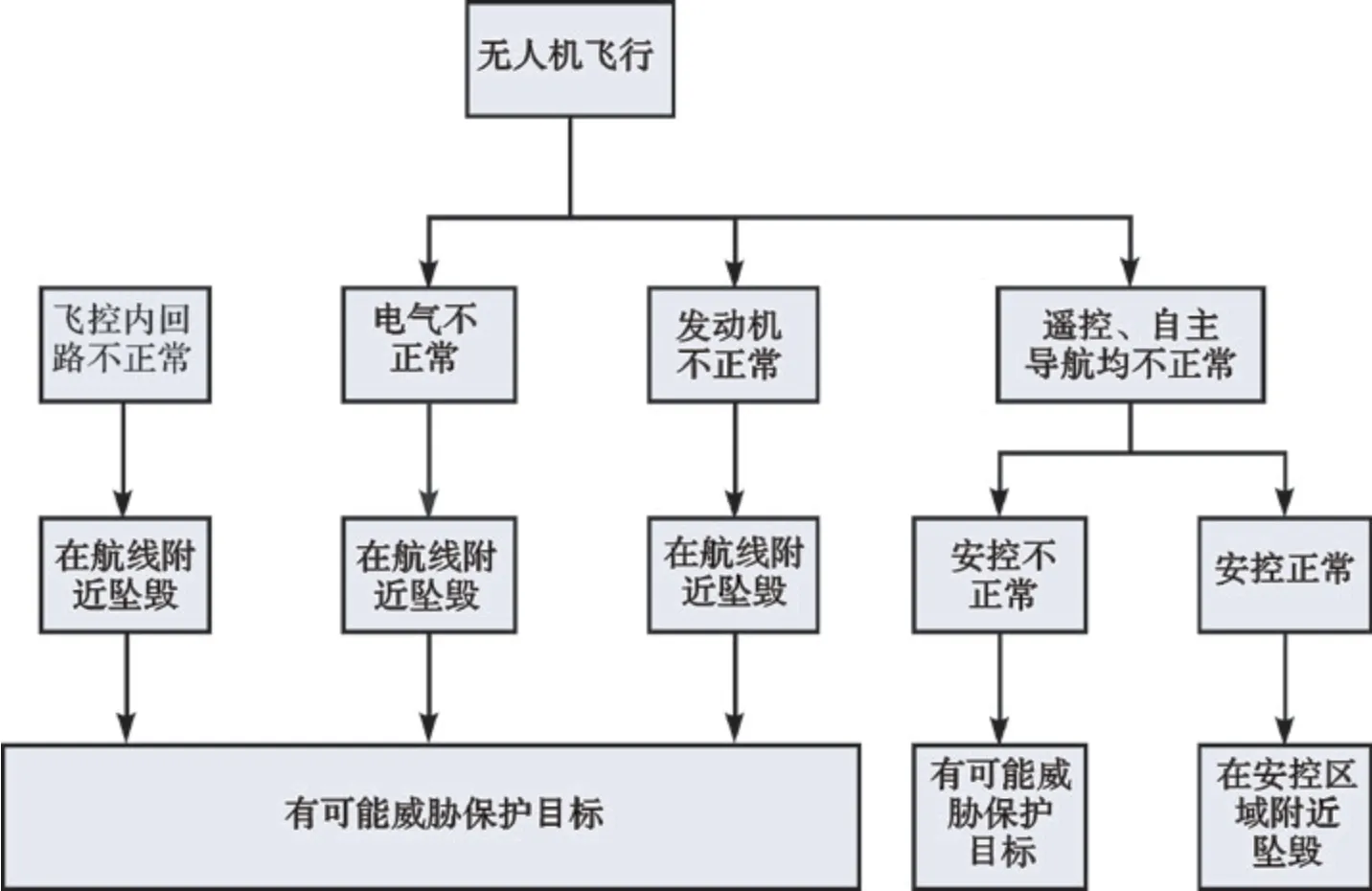
图3 无人机飞行时安全性分析框图
因此,在发射段无人机不会对发射禁区外目标造成威胁。
飞行过程中安全性分析
程序爬高结束后,如果没有遥控指令,无人机自动进入自主飞行,按预定航路进行飞行飞行。无人机飞行安全性分析如图3所示。
各种因素影响
根据上述计算,对无人机飞行安全性的影响因素进行了分析。
火箭助推器
无人机安全是指在无人机的运输、贮存、使用维护、发射和飞行等过程中不会对人员、财产、装备等造成损害;在无人机发射后,无论飞行是否成功,最后的落点(包括助推器)应在禁区和危险区内部。那幺飞行的安全概率必须大于0.998(不考虑无人机被击中后的情况)。根据上述的计算可知,飞行的安全概率小于0.998的任务可靠度,必须提高各方面的可靠性。
在不考虑回收段危险概率的条件下,飞行安全大于0.998,那幺应保证单发火箭助推器的可靠度大于0.9995。
飞行时间
由于系统中的许多设备都是电子设备,其可靠性服从指数分布,航时越长,可靠性越低。设总航时分别为t1和t2,则同一个设备的故障概率在不同航时条件下的比值为,可见,飞行一个航次与两个航次的飞行故障概率是不同的。但由于航时是根据任务要求确定的,一般难以压缩,只能是在满足需要的前提下,尽量减少总航时。
最远飞行距离
由于存在各种干扰因素,遥控遥测实际作用距离要小于理论值。一般说来,各种设备在使用中以使用其最大范围的2/3之内为宜,以保证设备的性能和可靠性。因此,建议最远飞行距离应不超过遥控遥测作用距离理论值的2/3。
航区内重要目标范围
从分析中可以看出,航区内重要目标的范围越大,越容易发生危险,所以在航区内应尽量减少这样的目标。这就要求在设置航区的时候,尽可能选择重要目标较少的区域。
结论
研究了无人机的安全概率计算模型,该模型将飞行任务分为发射起飞、飞行与回收三个阶段,对各阶段的危险概率进行计算,在采用一系列简化和假设的基础上,分析了无人机飞行航路设计和飞行航区设置对安全概率的影响,包括总航时、最远飞行距离、航区内重要目标的范围等方面对安全概率的影响,并提出了有利于飞行安全性的航路和航区设置原则。




