税小龙
贵州航天天马机电科技有限公司,贵州 遵义 563003
1 概述
为了保证行走设备在调平后的稳定性和坡度调平的需要,经常需将行走设备抬离地面足够的高度,但是许多行走设备受空间的限制,按常规的方式进行整个设备抬升是难以实现的。
目前多采用人工增加垫板的方式实现。
存在的问题及缺点:增加垫板延长行走机械的准备时间;增加了操作工的劳动强度。
2 结构组成
本机构的目的是克服上述背景技术的缺点而提供的一种结构简单,可自动旋转并锁紧,以保证离去角、离地要求和支撑行程的需要。
折动机构的结构如下:包括:1)定位螺钉;2)转动支座;3)转动控制器;4)驱动销;5)底座;6)键;7)定位轴,8)定位销;9)螺塞,10)碟簧盖;11)碟簧;12)感应杆,13)顶杆;14)定位座;15)球头等。转动控制器安装在本体的下端形成一个相对固定的整体,起到控制转动支座旋转的作业。定位座安装在支腿的下端,随着支腿相对本体进行上下运动,起到关节的作用。转动支座通过定位轴雨定位座连接在一起,转动支座的下端安装有待球铰的底座,起到加长支腿行程、根据地面状态进行适应性调整及支撑的作用。
主要特点:
支撑机构在撤收状态下,折动机构自动向上抬起,增大了行走机械的离去角,改善行走机械的通过性。
行走机械在调平支撑的过程中,折动机构可自动伸直成调平状态,从而增大了支撑的行程、减少了调平的时间。
折动机构的结构简单,可根据具体需求改变;安装没有具体的位置要求;维修方便,易于操作,通用性强。
附图说明:图1为本支撑机构的结构图;图2为图1的侧视图;图3为图2的剖视图。
3 结论
转动支座通过定位轴安装在定位座上,转动支座上装有驱动销,当支撑机构向下运动的同时,驱动销在转动控制器的控制槽内运动,带动转动支座逆时针转动,在定位座的下端装有定位销,当转动支座与本体成一直线后,定位销在弹簧的作用下,顶入定位轴的凹坑内,防止转动支座产生自由摆动。转动支座继续与支撑机构一起向下运动,当底座着地后,转动支座暂时停止运动,直至定位轴进入定位座的腰形孔,由于定位轴在腰形孔内具有防转动功能,定位轴一旦进入腰形孔,转动支座着地后在受力情况下,将限制器产生转动。同时,定位座设计有虚腿检测装置,通过碟簧来达到虚腿检测的要求,当支撑机构受力大于碟簧的作用力后,定位轴推动顶杆向上产生位移,顶杆的位置变化,同时驱动感应杆产生相应位移量后,接通虚腿信号电路,并将该信号传送给相应的控制器。支撑机构撤收是伸出的逆过程,当转动支座上的导向销进入转动控制器的导向槽后,在导向槽的引导下,使支撑机构的转动支座向上折叠,呈行走状态。
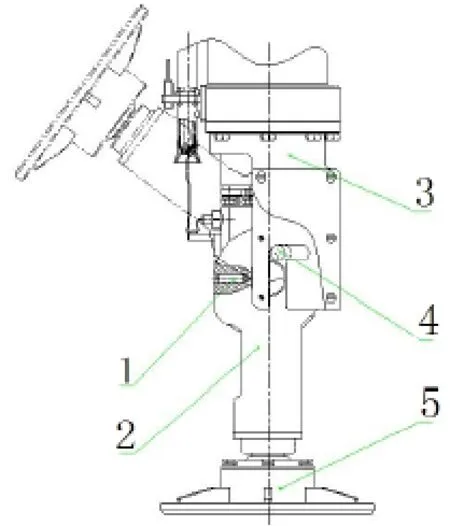
图1
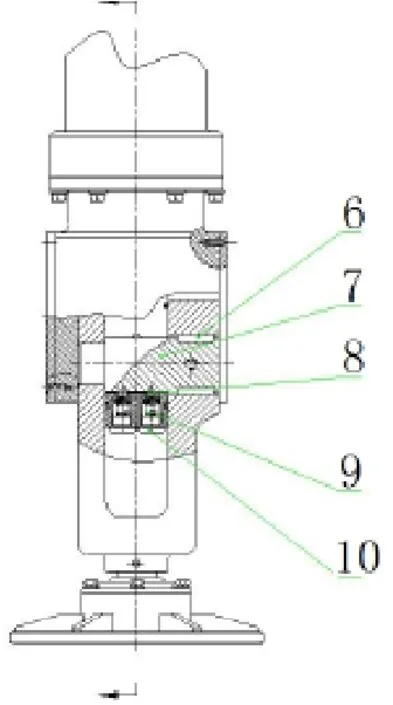
图2
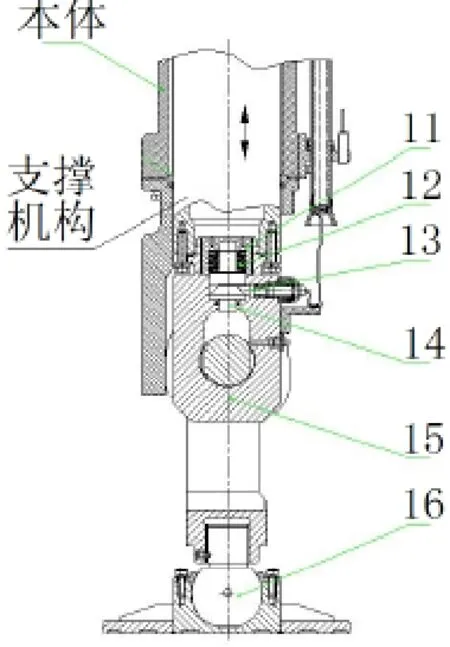
图3
[1]李瑞琴编着.机构系统创新设计[M].国防工业出版社.



